Controlled flight into terrain Bradley Air Services Limited (First Air) Boeing 737-210C, C-GNWN Resolute Bay, Nunavut
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
On 20 August 2011, the Boeing 737-210C combi aircraft (registration C-GNWN, serial number 21067), operated by Bradley Air Services Limited under its business name First Air, was being flown as First Air charter flight 6560 from Yellowknife, Northwest Territories, to Resolute Bay, Nunavut. At 1642 Coordinated Universal Time (1142 Central Daylight Time), during the approach to Runway 35T, First Air flight 6560 struck a hill about 1 nautical mile east of the runway. The aircraft was destroyed by impact forces and an ensuing post-crash fire. Eight passengers and all 4 crew members sustained fatal injuries. The remaining 3 passengers sustained serious injuries and were rescued by Canadian military personnel, who were in Resolute Bay as part of a military exercise. The accident occurred during daylight hours. No emergency locator transmitter signal was emitted by the aircraft.
1.0 Factual information
1.1. History of the flight
The International Civil Aviation Organization (ICAO) Convention on International Civil Aviation, Annex 13,Footnote 1 requires States conducting accident investigations to protect cockpit voice recordings. Canada complies with this requirement by making cockpit voice recordings privileged in the Canadian Transportation Accident Investigation and Safety Board Act. While the Transportation Safety Board of Canada (TSB) may make use of any on-board recording in the interests of transportation safety, it is not permitted to knowingly communicate any portion of an on-board recording that is unrelated to the causes or contributing factors of an accident or to the identification of safety deficiencies.
The reason for protecting cockpit voice recorder (CVR) material lies in the premise that these protections help ensure that this essential material is available for the benefit of safety investigations. The TSB has always met its obligations in this area and has restricted the use of CVR data in its reports. Unless the CVR material is required to both support a finding and identify a substantive safety deficiency, it will not be included in the TSB's report.
In this report, the TSB has made extensive use of the CVR recording. In each instance, the material has been carefully examined to ensure that the extracts used are related to the causes or contributing factors of this accident or to the identification of safety deficiencies.
The First Air Boeing 737-210C combiFootnote 2 aircraft departed Yellowknife (CYZF), Northwest Territories, at 1440Footnote 3 as First Air flight 6560 (FAB6560) on a charter flight to Resolute Bay (CYRB), Nunavut, with 11 passengers, 4 crew members, and freight on board.
The instrument flight rules (IFR) flight from CYZF was flight-planned to take 2 hours and 05 minutes at 426 knots true airspeed and a cruise altitude of flight level (FL) 310.Footnote 4 Air traffic control (ATC) cleared FAB6560 to destination via the flight-planned route: CYZF direct to the BOTER intersection, then direct to the Cambridge Bay (CB) non-directional beacon (NDB), then direct to 72° N, 100° 45′ W, and then direct to CYRB (Figure 1). The planned alternate airport was Hall Beach (CYUX), Nunavut. The estimated time of arrival (ETA) at CYRB was 1645.
Figure 1. Route map (image: Google Earth, with annotations by TSB)
The captain occupied the left seat and was designated as the pilot flying (PF). The first officer (FO) occupied the right seat and was designated as the pilot not flying (PNF).
Before departure, First Air dispatch provided the crew with an operational flight plan (OFP) that included forecast and observed weather information for CYZF, CYRB, and CYUX, as well as NOTAM (notice to airmen) information.
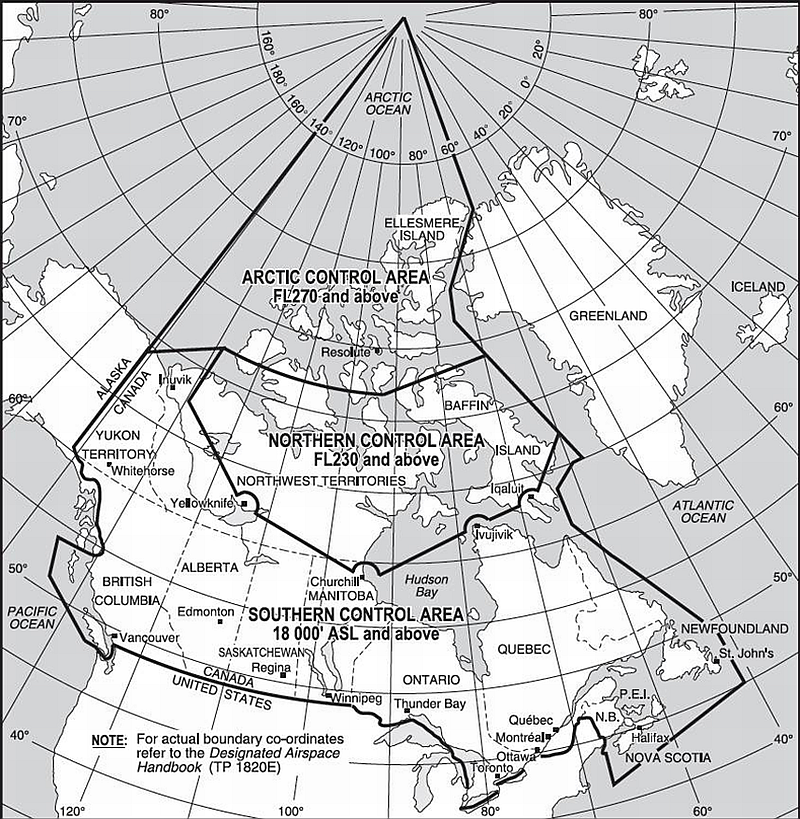
Radar data show that FAB6560 entered the Northern Domestic Airspace (NDA) 50 nautical miles (nm) northeast of CYZF, approximately at RIBUN waypoint (63° 11.4′ N, 113° 32.9′ W) at 1450.
During the climb and after leveling at FL310, the crew received CYRB weather updates from a company dispatcher (Appendix A). The crew and dispatcher discussed deteriorating weather conditions at CYRB and whether the flight should return to CYZF, proceed to the alternate CYUX, or continue to CYRB. The crew and dispatcher jointly agreed that the flight would continue to CYRB.
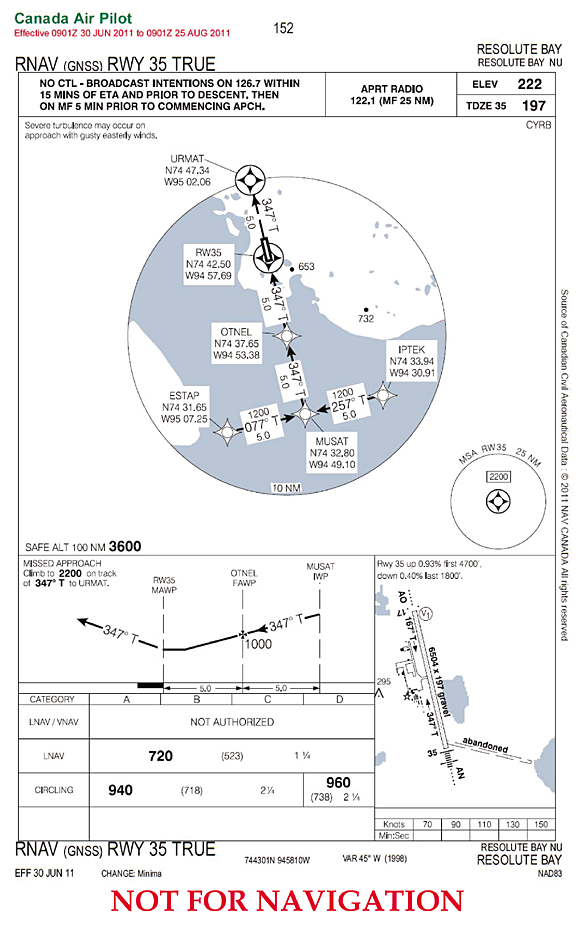
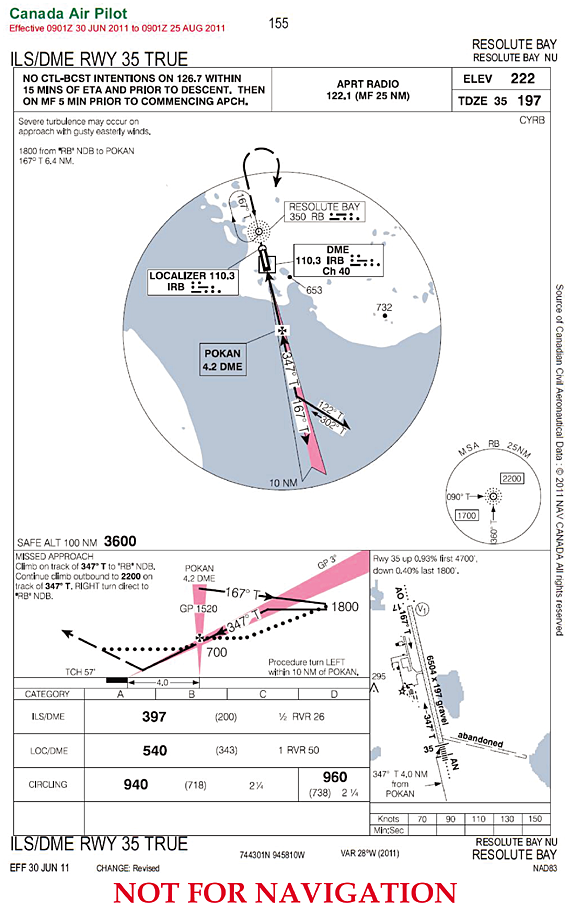
At 1616, the crew programmed the global positioning systems (GPS) to proceed from their current en-route position direct to the MUSAT intermediate waypoint on the RNAV (GNSS)Footnote 5 Runway (RWY) 35 TRUE approach at CYRB (Appendix B), which had previously been loaded into the GPS units by the crew. The crew were planning to transition to an ILS/DMEFootnote 6 RWY 35 TRUE approach (Appendix C) via the MUSAT waypoint.
A temporary military terminal control area (MTCA) had been planned, in order to support an increase in air traffic at CYRB resulting from a military exercise, Operation NANOOK.Footnote 7 A military terminal control unit at CYRB was to handle airspace from 700 feet above ground level (agl) up to FL200 within 80 nm of CYRB.
Commencing at 1622:16, the FO made 3 transmissions before establishing contact with the NAV CANADA Edmonton Area Control Centre (ACC) controller. At 1623:29, the NAV CANADA Edmonton ACC controller cleared FAB6560 to descend out of controlled airspace and to advise when leaving FL270. The crew were also advised to anticipate calling the CYRB terminal control unit after leaving FL270, and that there would be a layer of uncontrolled airspace between FL270 and FL200. The FO acknowledged the information. FAB6560 commenced descent from FL310 at 1623:40 at 101 nm from CYRB.
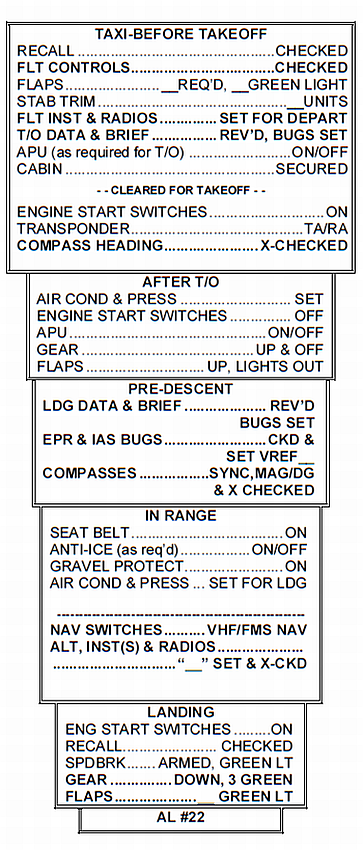
The crew initiated the pre-descent checklist at 1624 and completed it at 1625.
At 1626, the crew advised the NAV CANADA Edmonton ACC controller that they were leaving FL260. At 1627:09, the FO subsequently called the CYRB terminal controller and provided an ETA of 1643 and communicated intentions to conduct a Runway 35 approach. Radio readability between FAB6560 and the CYRB terminal controller was poor, and the CYRB terminal controller advised the crew to try again when a few miles closer.
At 1629, the crew contacted the First Air agent at CYRB on the company frequency. The crew advised the agent of their estimated arrival time and fuel request. The crew then contacted the CYRB terminal controller again, and were advised that communications were now better. The CYRB terminal controller advised that the MTCA was not yet operational, and provided the altimeter setting and traffic information for another inbound flight.Footnote 8 The CYRB terminal controller then instructed the crew to contact the CYRB tower controllerFootnote 9 at their discretion. The FO acknowledged the traffic and the instruction to contact CYRB tower.
At 1631, the crew contacted the CYRB tower controller, who advised them of the altimeter setting (29.81 inches of mercury [in. Hg]) and winds (estimatedFootnote 10 160° true [T] at 10 knots), and instructed them to report 10 nm final for Runway 35T. The crew asked the tower controller for a runway condition report, and was advised that the runway was a little wet and that no aircraft had used it during the morning. The FO acknowledged this information.
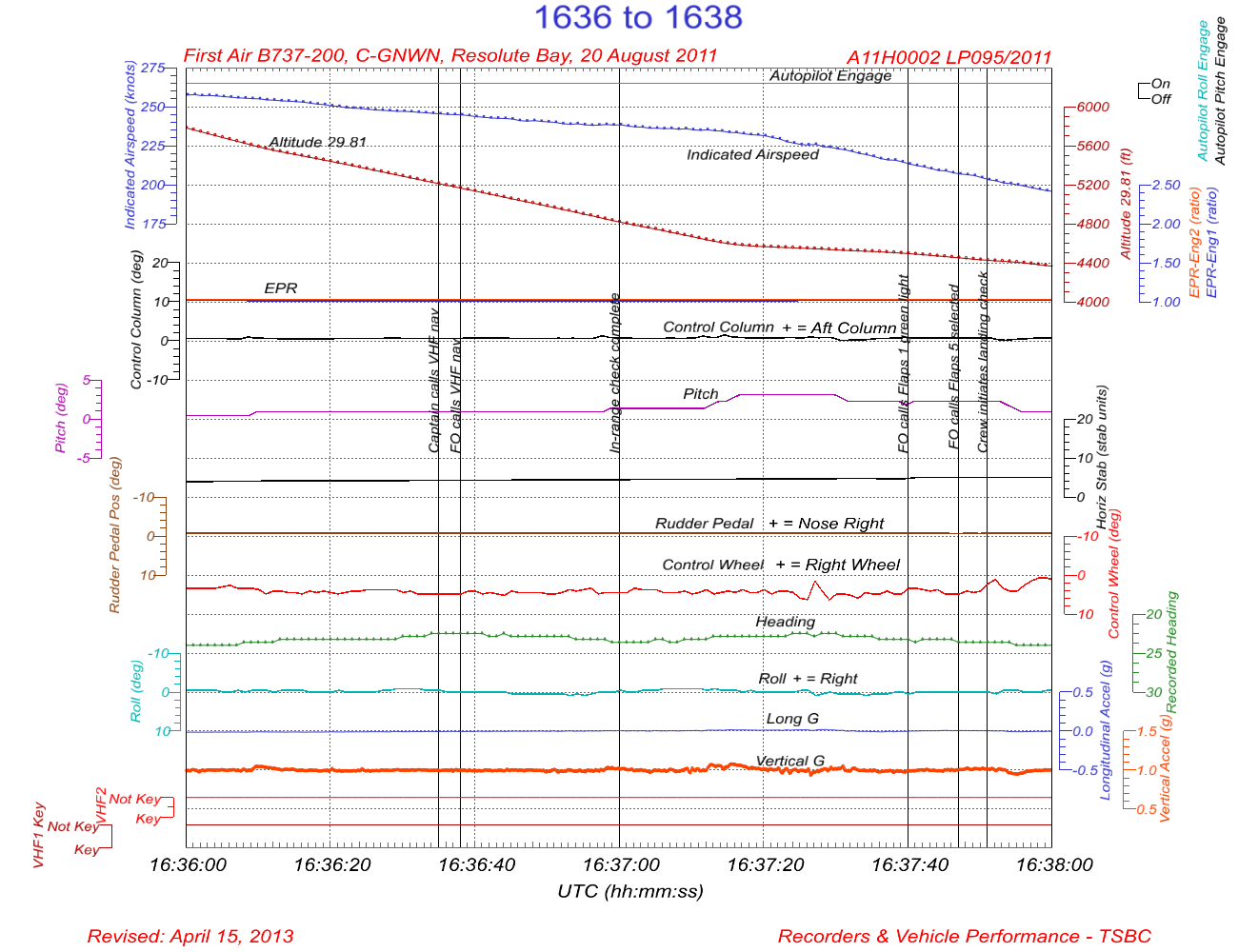
The crew initiated the in-range checklist at 1632 and completed it at 1637. At 1637, they began configuring the aircraft for approach and landing, and initiated the landing checklist.
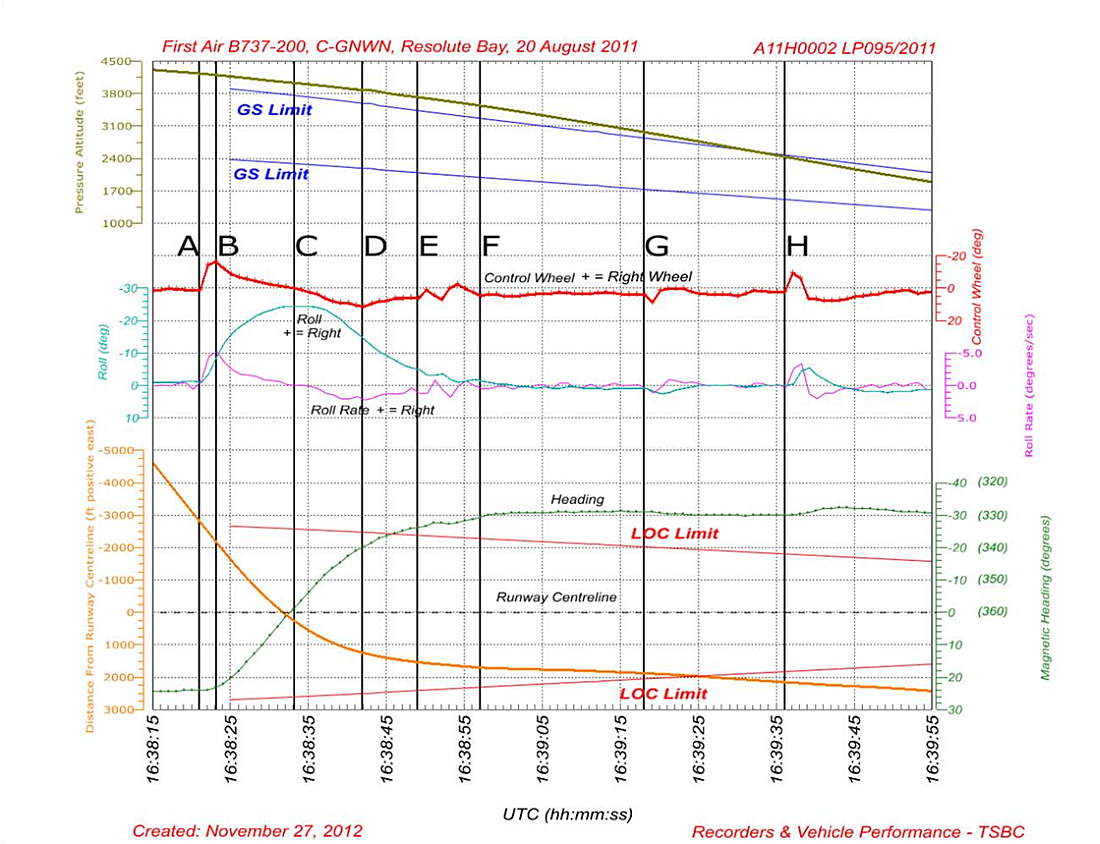
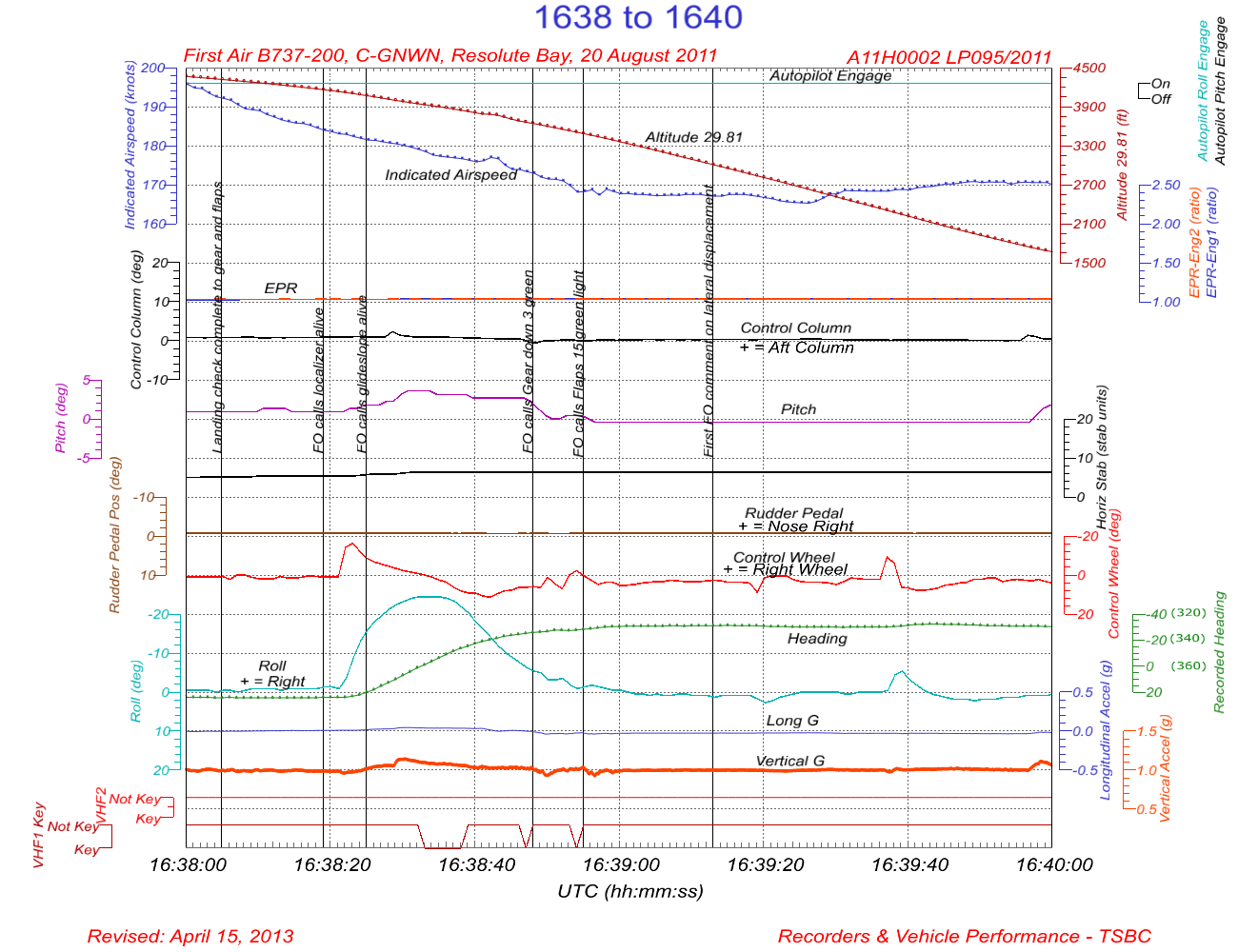
At 1638:21, FAB6560 commenced a left turn just before reaching MUSAT waypoint. At the time of the turn, the aircraft was about 600 feet above the ILS glideslope at 184 knots indicated airspeed (KIAS). The track from MUSAT waypoint to the threshold of Runway 35T is 347°T, which coincides with the localizer track for the ILS/DME RWY 35 TRUE approach. After rolling out of the left turn, FAB6560 proceeded on a track of approximately 350°T (Appendix D).
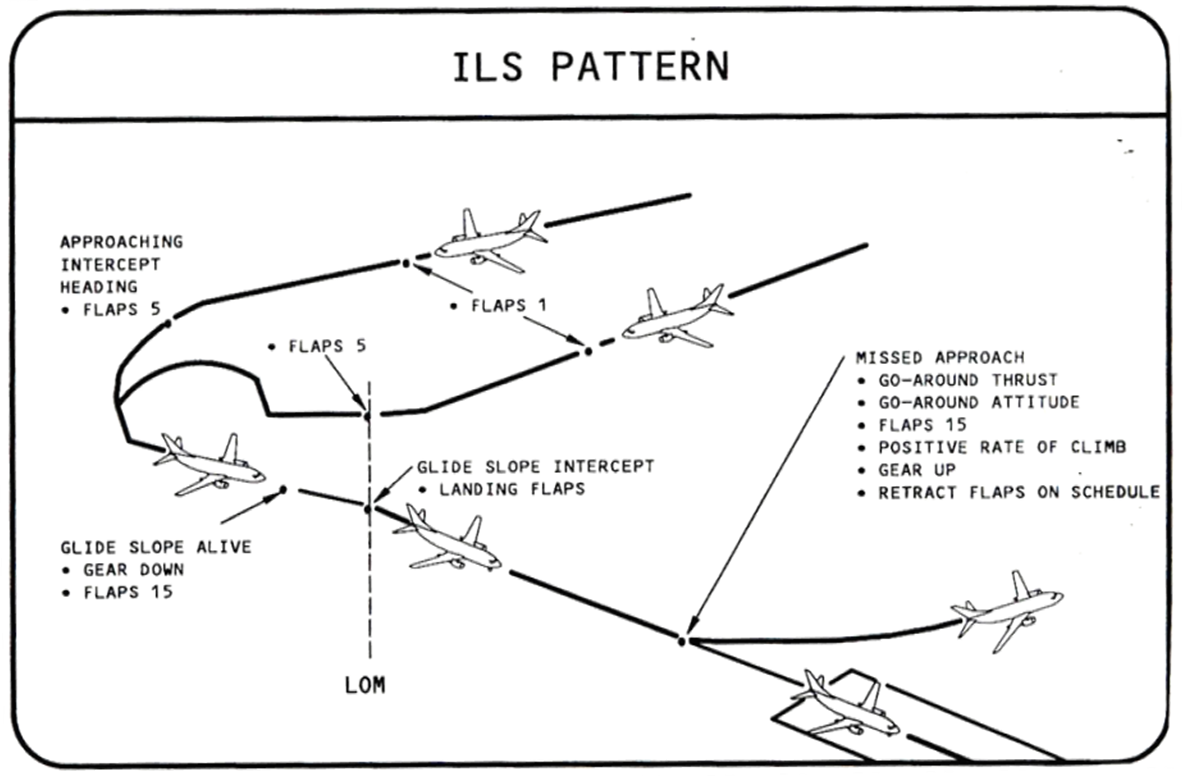
At 1638:32, the crew reported 10 nm final for Runway 35T. The captain called for the gear to be lowered at 1638:38 and for flaps 15 at 1638:42. Airspeed at the time of both of these calls was 177 KIAS. At 1638:39, the CYRB tower controller acknowledged the crew's report and instructed them to report 3 nm final. At 1638:46, the FO requested that the tower repeat the last transmission. At 1638:49, the tower repeated the request to call 3 nm final; the FO acknowledged the call. At this point in the approach, the crew had a lengthy discussion about aircraft navigation (Table 1).
Table 1. Pilot discussion regarding aircraft navigation
1639:13
to
1639:30
FO makes 5 statements regarding aircraft lateral displacement from desired track.
1639:33
to
1639:37
Captain makes 2 statements indicating satisfaction that the autopilot is tracking properly.
1639:46
FO makes statement about track deviation displayed on GPS.
1639:57
FO states they are not on auto approach, just on the flight director.
1640:07
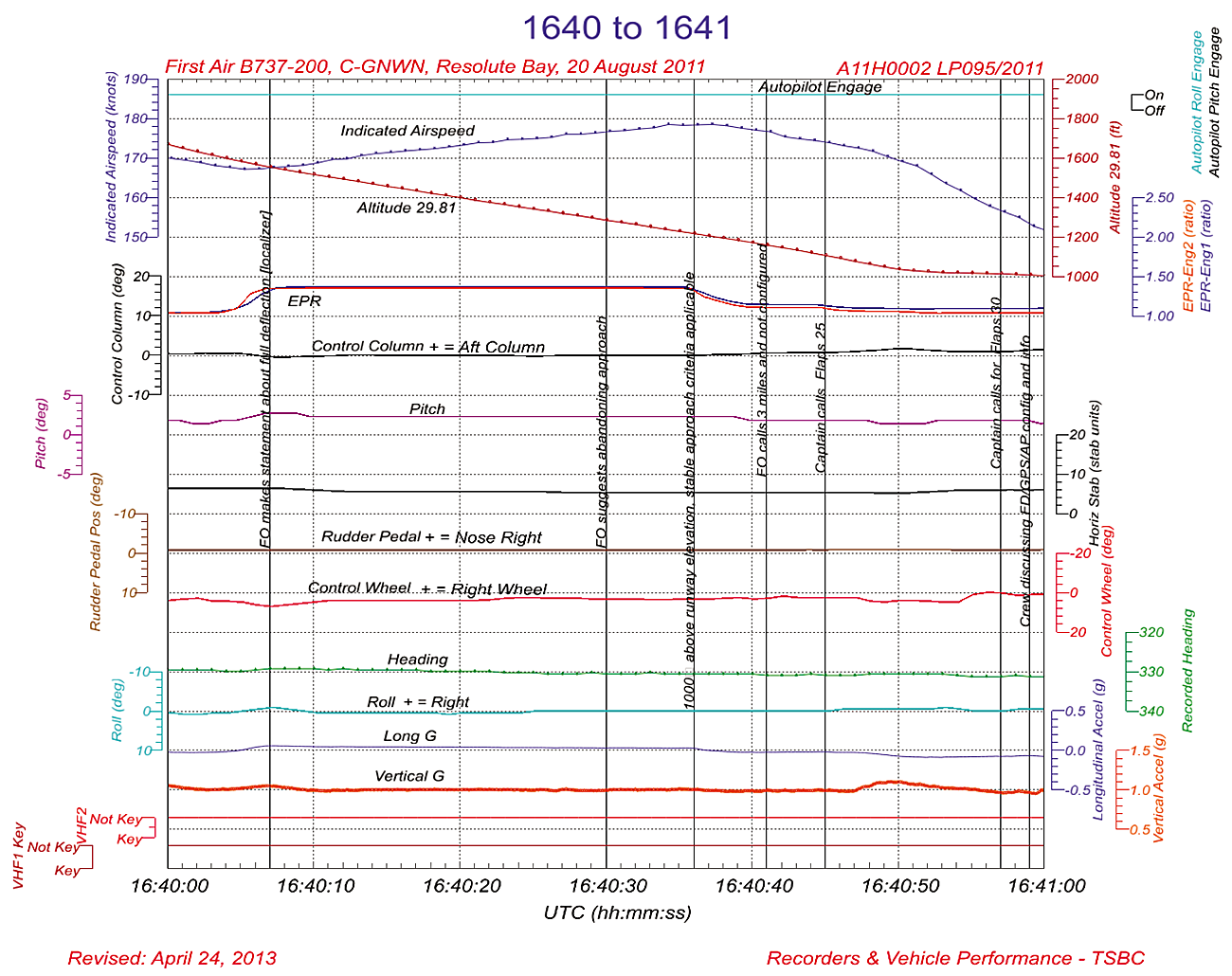
FO queries captain to confirm full deflection.
1640:08
Captain concurs, and questions why full deflection when they are on the localizer.
1640:11
FO states they are not on the localizer.
1640:14
Captain states “It's captured; ten three is the localizer?”
1640:17
FO disagrees on localizer capture and reminds the captain about the hill to the right of the runway.
1640:23
FO states GPS is also showing to the right.
1640:25
FO questions captain as to whether they did something wrong.
1640:30
FO states opinion that they should abandon the approach and then solve the navigational problem.
1640:33
Captain indicates that he plans to continue the approach.
1640:35
FO acknowledges captain's plan to continue the approach.
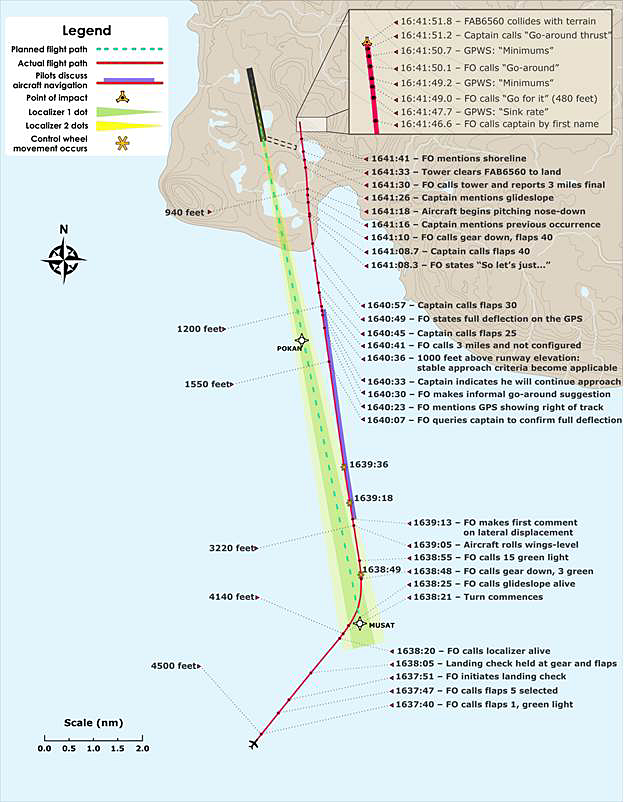
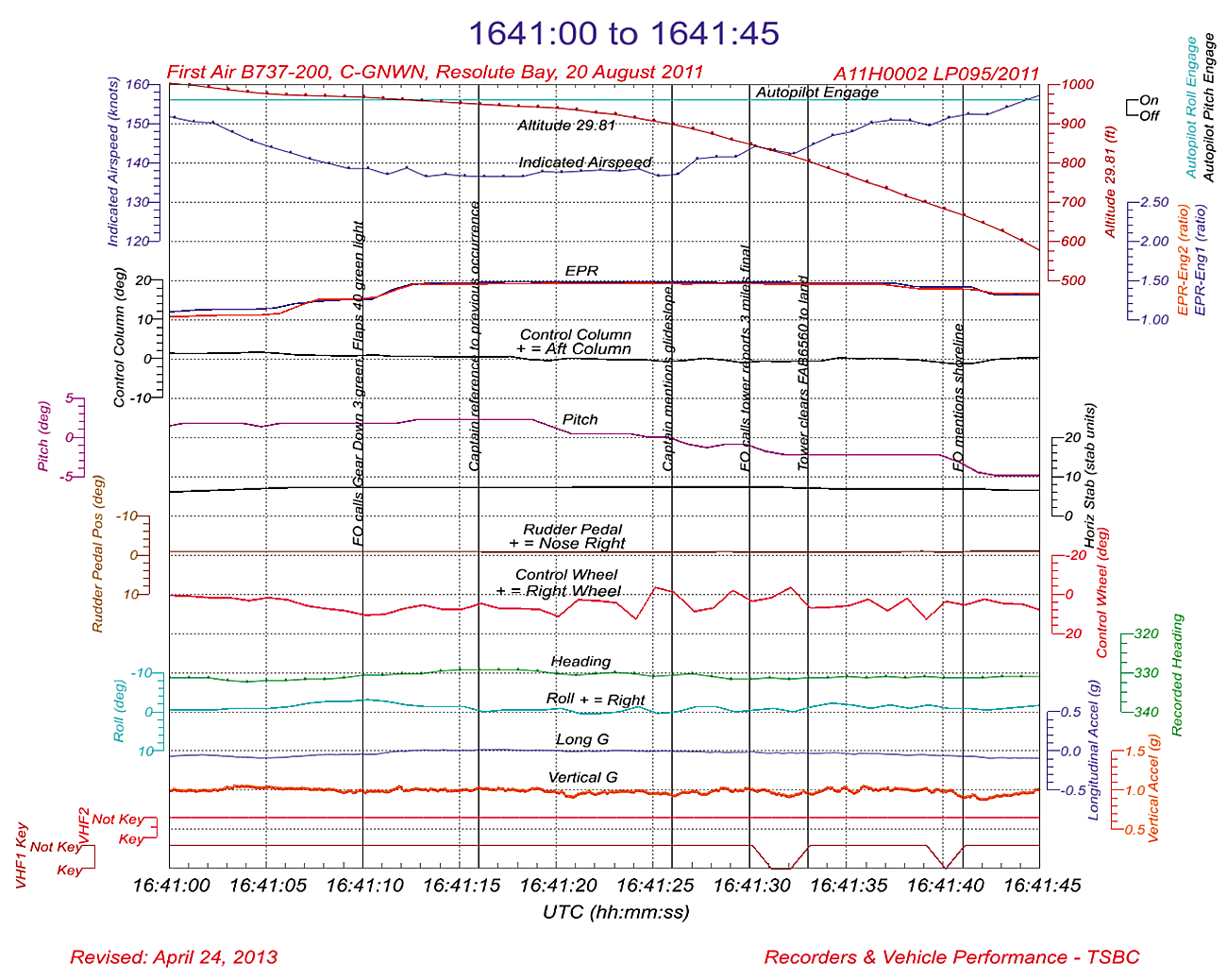
At 1640:36, FAB6560 descended through 1000 feet above field elevation. Between 1640:41 and 1641:11, the captain issued instructions to complete the configuration for landing, and the FO made several statements regarding aircraft navigation and corrective action. At 1641:30, the crew reported 3 nm final for Runway 35T. The CYRB tower controller advised that the wind was now estimated to be 150°T at 7 knots, cleared FAB6560 to land Runway 35T, and added the term “check gear down” as required by the NAV CANADA Air Traffic Control Manual of Operations (ATC MANOPS) Canadian Forces Supplement (CF ATC Sup) Article 344.3.Footnote 11
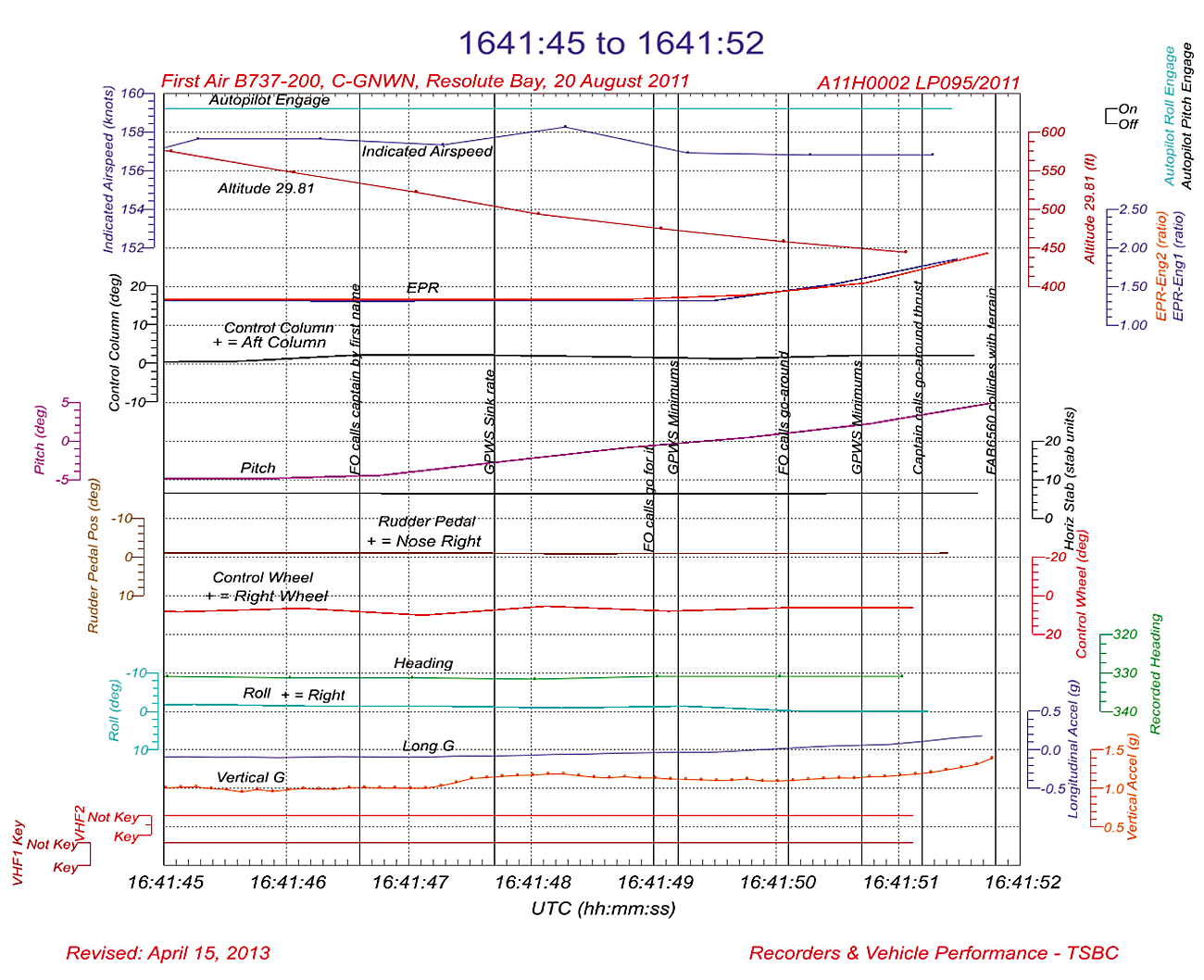
FAB6560's response to the tower (1641:39) was cut off, and the tower requested the crew to say again. There was no further communication with the flight. The tower controller did not have visual contact with FAB6560 at any time. Table 2 indicates the events on final approach.
Table 2. Events on final approach
1641:41.1
FO states “Just over the shoreline.”
1641:46.0
Pitch begins to increase from −5°
1641:46.6
FO calls captain by first name; states “I don't like this.”
1641:47.7
GPWS: “Sink rate”
1641:49.0
FO states “Go for it.”
1641:49.2
GPWS: “Minimums”
1641:50.1
FO states “Go around.”
1641:50.7
GPWS: “Minimums”
1641:51.2
Captain calls “Go-around thrust.”
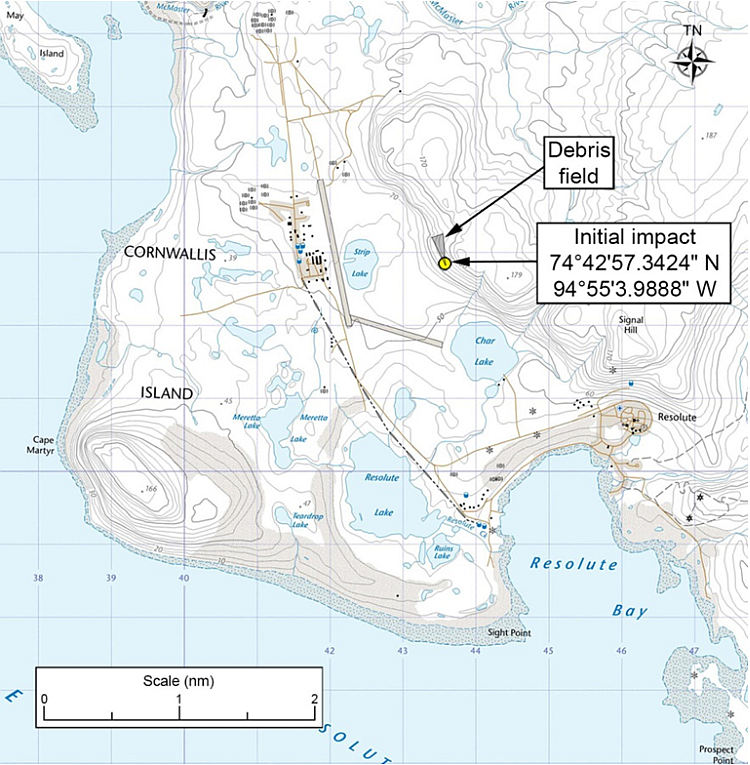
At 1641:51.8, as the crew were initiating a go-around, FAB6560 collided with terrain about 1 nm east of the midpoint of the CYRB runway. The accident occurred during daylight hours and was located at 74° 42′57.3″ N, 94° 55′ 4.0″ W, at 396 feet above mean sea level.
The 4 crew members and 8 passengers were fatally injured. Three passengers survived the accident and were rescued from the site by Canadian military personnel, who were in CYRB participating in Operation NANOOK. The survivors were subsequently evacuated from CYRB on a Canadian Forces CC-177 aircraft.
1.2. Injuries to persons
Table 3. Injuries to persons
Crew
Passengers
Others
Total
Fatal
4
8
−
12
Serious
−
3
−
3
Minor/none
−
−
−
−
Total
4
11
−
15
1.3. Damage to aircraft
The ground scars at the initial impact location were consistent with contact of the VHF (very high frequency) no. 2 antenna,Footnote 12 nose-gear gravel deflector, left and right main landing gear, and left and right engines. There was no debris originating from the fuselage, so the fuselage likely did not contact the ground at the initial impact. The force of the initial impact was sufficient to cause the separation of the engines and main landing gear.
After the initial impact, the aircraft continued on a ballistic trajectoryFootnote 13 in close proximity to the ground, before contacting the ground a second time about 600 feet from the initial impact. After this second impact, the aircraft structure was extensively broken up, and separated into 3 main sections and numerous smaller debris pieces.
The only fire damage observed was to the centre fuselage and wings, where there was a severe post-crash fire. The aircraft was destroyed by the impact forces and the ensuing post-crash fire.
1.4. Other damage
Approximately 296 litres of fuel were recovered from the left wing tank during the on-site investigation. No fuel remained in the right wing tank due to the post-crash fire. The fuel remaining at impact was calculated based on the nominal tank capacities, refuelling records, and flight plan records. Based on these calculations, the total amount of fuel spilled and/or burned as a result of the occurrence was estimated to be 8118 litres.
1.5. Personnel information
1.5.1. Flight crew
Based on available records, the pilots were certified and qualified for the flight in accordance with existing regulations.
Table 4. Flight crew information
Captain
First officer
Pilot licence
Airline transport pilot licence
Airline transport pilot licence
Medical expiry date
01 November 2011
01 May 2012
Total flying hours
12 910
4848
Hours on type
5200
103
Hours last 7 days
20
10
Hours last 30 days
45
58
Hours last 90 days
105
103
Hours on type
last 90 days
105
103
Hours on duty
before occurrence
3
3
Hours off duty
before work period
11
85
1.5.1.1. Captain
The captain was hired by First Air in March 1996 as an FO on the de Havilland Canada Limited DHC-6 Twin Otter. In February 1998, the captain was awarded an FO position on the Hawker Siddeley HS-748, and in October 1999, was moved up to an FO position on the Boeing 737 (B737). The captain flew as an FO on the B737 until May 2008, when promoted to a captain position.
During the 15 years of employment at First Air, the captain gained experience flying in the Arctic and was familiar with uncontrolled airspace operations at Resolute Bay (CYRB). The captain received initial crew resource management (CRM) training in February 1997; the captain's last recurrent CRM training was completed in November 2010.
During the 72 hours before the accident, the captain was on flight status. He had a duty period of 7 hours on 17 August, followed by 16.5 hours of rest. On 18 August, he had a duty period of nearly 12 hours followed by 17 hours of rest, and on 19 August, he had a duty period of 5.5 hours followed by 11 hours of rest before reporting for duty on 20 August. Fatigue was not considered a contributing factor.
1.5.1.2. First officer
The FO was hired by First Air in September 2007 as an FO on the Avions de transport régional ATR-42. In August 2009, the FO was awarded a captain position on the ATR-42. In June 2011, the FO was moved up to an FO position on the B737. During the 4 years of employment at First Air, the FO gained experience flying large aircraft in the Arctic. Before being hired by First Air, the FO was employed by another commercial operator in CYZF flying various small aircraft. The FO received initial CRM training in September 2007; the FO's last recurrent CRM training was completed in March 2011.
The FO was off duty during the 72 hours before 20 August; fatigue was not considered a contributing factor.
1.5.2. Flight attendants
According to the records provided by the operator, both flight attendants were appropriately trained, and all qualifications were current in accordance with the approved company training program. The rest schedules of both flight attendants met company and regulatory requirements.
1.5.3. CYRB air traffic controllers
1.5.3.1. Terminal controller
The military terminal control area (MTCA) controller had been employed as a controller in the military for 3 years. The controller met all training and qualification requirements in accordance with Canadian Forces Administrative Order 9-18 (air traffic control [ATC] licensing). Instrument flight rules (IFR) certification was attained in 2008. The controller had been on duty since 1200. The controller had not been on duty during the previous 72 hours. Fatigue was not considered an issue.
1.5.3.2. Tower controller
The tower controller had been employed as a controller in the military for 10 months. The controller met all training and qualification requirements in accordance with Canadian Forces Administrative Order 9-18 (ATC licensing). Visual flight rules (VFR) certification was attained in December 2010. The controller received briefing and testing on the CYRB local procedures before commencing operations. The controller did not have, and was not required to have, an IFR control certification. The controller had been on duty since 1200. In the previous 72 hours, the controller had been on duty for a total of 18 hours. Fatigue was not considered an issue.
1.6. Aircraft information
Table 5. Aircraft information
Manufacturer
The Boeing Company
Type and model
737-210C
Year of manufacture
1975
Serial no.
21067
Certificate of airworthiness issue date
06 March 2003
Certificate of registration issue date
28 April 2006
Registered to
Bradley Air Services Limited
Trade name used (doing business as)
First Air
Total airframe time
86 190 hours (approximate)
Engine type (no.)
Pratt & Whitney JT8D-17 (2)
Maximum allowable take-off weight
119 500 pounds
1.6.1. Aircraft maintenance
1.6.1.1. General
First Air Maintenance Services is the operator's primary provider of aircraft maintenance services. It is owned and operated by First Air under a separate approved maintenance organization certificate. The occurrence aircraft (C-GNWN) was to be maintained in accordance with the maintenance program approved by Transport Canada (TC). The operator's maintenance control manual is the document used to implement the program. Other than the 2 airworthiness directives (ADs) mentioned below, there were no other discrepancies with the maintenance program.
ADs are instructions that specify special inspections, component replacements, or modifications that are required to ensure the continuing airworthiness of aircraft. ADs are issued when experience reveals a functional or structural hazard affecting flight safety that requires immediate attention. ADs are issued by the civil aviation authority. In Canada, they are issued by TC, which states the following:Footnote 14
Compliance with ADs is essential to airworthiness. Pursuant to Canadian Aviation Regulations (CAR) 605.84, aircraft owners are responsible for ensuring that their aircraft are not flown with any ADs outstanding against that aircraft, its engines, propellers or other items of equipment. …When compliance with an AD is not met, the flight authority is not in effect and the aircraft is not considered to be airworthy.
The flight authority pertaining to the occurrence aircraft was the certificate of airworthiness.
It is the responsibility of the operator to review and evaluate ADs. All aircraft-/component-related ADs, whether directing one-time only, repetitive or terminating action, are entered in the companys maintenance program software. The operator then develops service maintenance procedures and service maintenance actions, and completes the work on the aircraft.
The TSB reviewed the occurrence aircraft records for the period of 08 December 2008 to 20 August 2011. A list of the ADs applicable to the occurrence aircraft was retrieved from the TC Web site. This list was compared to the ADs recorded in the aircraft logbooks, and all applicable ADs were recorded as completed.
Subsequent investigation revealed that not all required actions were completed for 2 ADs.
1.6.1.2. Airworthiness Directive 2004-19-10
Airworthiness Directive (AD) 2004-19-10 required inspection of the horizontal stabilizer outer and inner pivot hinge pins for corrosion or cracking. Failure of the outer and inner hinge pins could allow the pins to migrate out of the joint and result in intermittent movement of the horizontal stabilizer structure and consequent loss of controllability of the aircraft.
As a result of a records audit conducted by the operator in September 2012, it was determined that not all of the inspection requirements of AD 2004-19-10 had been completed. The service maintenance procedure created to comply with the AD did not contain sufficient information to accomplish all of the AD requirements.
There were no anomalies entered into the aircraft logbooks that would indicate difficulties with the controllability of the aircraft. Similarly, there were no indications of pitch control problems identified in the flight data recorder (FDR) for the occurrence flight.
1.6.1.3. Airworthiness Directive 2006-12-23
AD 2006-12-23 required inspection of the elevator tab trailing-edge free play. The AD allowed for a certain amount of free play, but if the inspection revealed free play in excess of the allowed tolerance, the repair must be completed before further flight.
A deferred maintenance item (DMI) is an aircraft defect that is not of an airworthy nature and is not contained in the minimum equipment list or the configuration deviation list. Such a defect may be deferred in accordance with the DMI procedure contained in the maintenance control manual.Footnote 15 The DMIs are controlled using serialized DMI cards and tracked in the maintenance program software. The aircraft had 4 DMIs outstanding on the day of the occurrence.
The TSB discovered that 2 of the DMIs related to the repetitive elevator tab trailing-edge free- play check required by AD 2006-12-23. Both DMIs described free play in excess of the tolerances allowed by the AD, and therefore should not have been deferred. Both DMIs were created on 27 July 2011, with assigned rectification limits of 120 days. The due date of 27 November 2011 had not yet been reached. Therefore, the DMIs were still open.
There were no anomalies entered into the aircraft logbooks that would indicate difficulties with the controllability of the aircraft. Similarly, there were no indications of pitch control problems identified in the FDR data for the occurrence flight.
1.6.2. Aircraft performance
1.6.2.1. Weight and centre of gravity
The aircraft weight and centre of gravity were within the prescribed limits. The aircraft was being operated within performance limitations on departure from CYZF and for the planned landing in Resolute Bay (CYRB).
1.6.2.2. Airspeed limitations
The maximum airspeed limit for extension of the landing gear (gravel-equipped) is 180 knots indicated airspeed (KIAS). Airspeed limits for the flaps are as follows:
Flaps 1 – 230 KIAS
Flaps 5 – 225 KIAS
Flaps 15 – 195 KIAS
Flaps 25 – 190 KIAS
Flaps 30 – 185 KIAS
Flaps 40 – 170 KIAS
1.6.3. Terrain awareness devices
The aircraft was equipped with a Sundstrand Data Control Incorporated Mark IIFootnote 16 ground proximity warning system (GPWS). This is an older-generation GPWS that is based on 1970s technology. This system provides aural and visual warnings and/or alerts if specified conditions relating to the following parameters exist:
barometric descent rate;
terrain closure rate;
altitude loss after take-off or go-around;
terrain clearance (when not in the landing configuration);
deviation below glideslope.
The system uses information from the captain's radio altimeter to determine the aircraft's height above terrain. This function only provides a warning for terrain directly below the aircraft and not for terrain in front of the aircraft. When the captain's radio altimeter is inoperative, all modes of the GPWS are inoperative. When the aircraft is configured for landing, the tolerance limit for the safety warnings is desensitized to prevent nuisance warnings as the aircraft approaches the ground for landing.
C-GNWN was configured for landing when the first GPWS aural alert, “sink rate”, was issued at 4.1 seconds before impact. At 2.6 seconds before impact, the aural alert “minimums… minimums” was issued.
Had C-GNWN remained in service, a newer-generation GPWS would have been installed during the next C check.Footnote 17 This check was not due for approximately 1890 flight hours. Section 1.18.2.2 describes the enhanced GPWS standard.
1.6.4. C-GNWN navigation systems
1.6.4.1. VHF navigationsystem
When the receivers are operating, the VHF navigation system provides information about aircraft position with respect to, and deviation from, a selected VHF omnidirectional range (VOR) course, or localizer and glideslope approach beams.
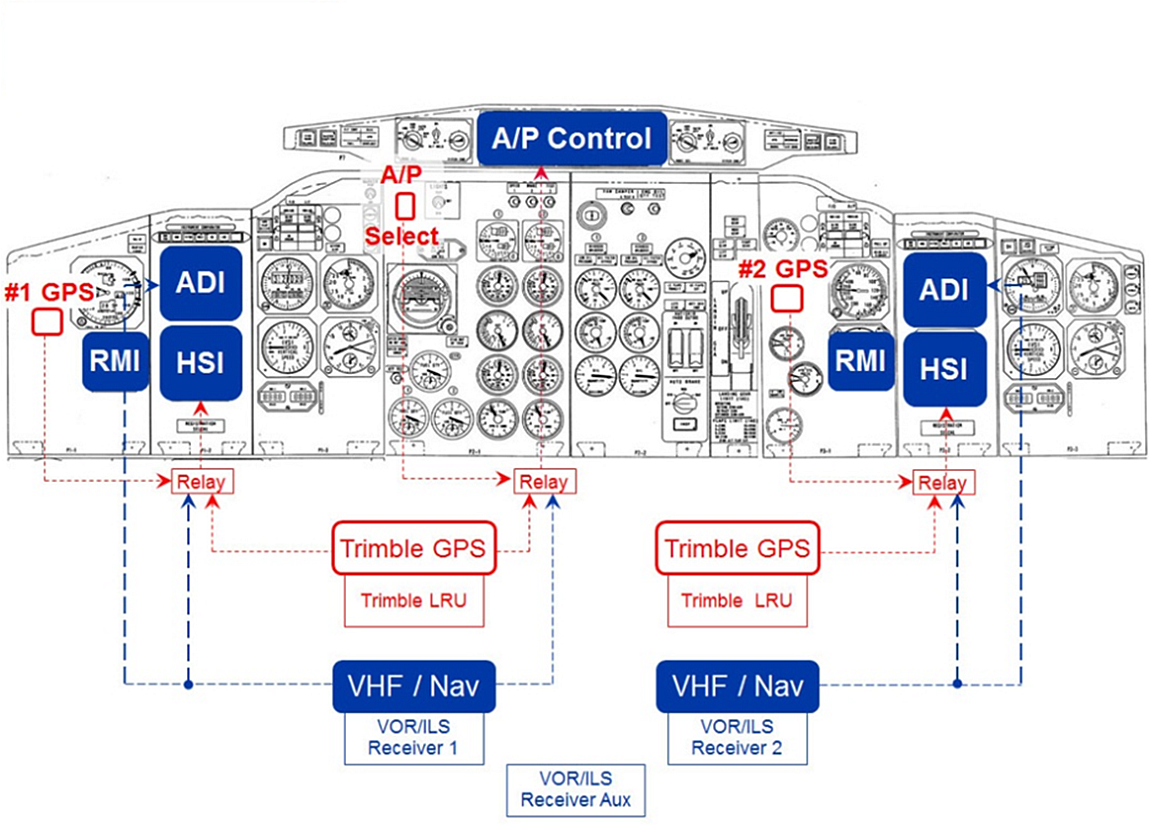
The VHF navigation (NAV) selector switchFootnote 18 was a locking toggle type switch with 3 positions: CAPT ON AUX, NORMAL, and F/O ON AUX. When the VHF NAV selector switch is set to NORMAL, VHF NAV receiver no. 1 is controlled by control panel no. 1, and provides signals to the autopilot system; to the captain's flight director, horizontal situation indicator (HSI), attitude director indicator (ADI), and radio-magnetic indicator (RMI); and to the FO's RMI. VHF NAV receiver no. 2 is controlled by control panel no. 2, and provides signals to the FO's flight director, HSI, ADI and RMI, and to the captain's RMI. VHF NAV receiver no. 3 is in standby and not controlled.
1.6.4.2. Automatic direction finders
The aircraft was equipped with 2 automatic direction finding (ADF) systems. An ADF system enables automatic determination of magnetic and relative bearings to the selected non-directional beacon (NDB). The no. 1 receiver uses the narrow pointer on the RMIs, and the no. 2 receiver uses the wide pointer. The audio is heard by using the ADF receiver control on the audio selector panel. ADF bearing pointers will not display correct magnetic bearing when the compass information is lost or invalid. Relative bearings are indicated by the pointers if the receiver is operating.
1.6.4.3. Astro compass
Aircraft records show that C-GNWN was equipped with an astro compass, which was stowed in the cockpit.
1.6.5. C-GNWN compass systems
1.6.5.1. General
The compass systems are primarily designed to furnish the captain and FO with information concerning the aircraft's magnetic or true heading during the flight. Heading information is displayed on the aircraft's RMI and HSI compass cards.
C-GNWN was manufactured and delivered by Boeing to the original customer with 2 Sperry C-9 compasses that operated only in magnetic slaved mode. The aircraft was subsequently acquired by a Canadian operator in 1988, and the compass systems were upgraded to a Sperry C-11B by Western Avionics. The C-11B compass system is a gyroscopically stabilized system that operates either as a free directional gyro (DG), or as a slaved gyro in magnetic mode, depending on the DG/MAG (magnetic) switch position selected by the pilots on the compass controller. The compass systems are comprised of DGs (section 1.6.5.2), flux valves, compass controllers, a compass transfer switch, instrument comparators, RMIs, and HSIs (Appendix E).
The upgrade enabled the compasses to operate in free gyro, or DG mode, which is necessary in Canadian Northern Domestic Airspace (NDA) because the proximity of the north magnetic pole results in magnetic compass unreliability. There is no supplemental type certificate associated with this modification; consequently, no aircraft flight manual supplement was produced. The modification was documented with a United States (US) Federal Aviation Administration (FAA) Form 337.Footnote 19
The aircraft was subsequently acquired by First Air. The compass maintenance program carried out by First Air was as detailed in the Boeing maintenance planning document D6-17594-1, page 6.
Review of C-GNWN maintenance records from 05 December 2010 to the occurrence date revealed that there was only 1 deficiency related to the compass systems, including the DGs. On 09 February 2011, the no. 2 compass indicator was identified as inoperative, and the indicator was replaced.
1.6.5.2. Directional gyros
The C-11B compass system includes DG part no. 2588302-1, which is specified to have latitude-corrected gyro drift accuracy of ±1° per hour.Footnote 20
Examination of maintenance records revealed that the DGs installed in C-GNWN were identified with part no. 2588302-1 and serial nos. 8084339 and 7123049. Serial no. 7123049 was overhauled at the Honeywell Ottawa repair facility in November 1992 and again in June 1999, and had a “No Fault Found” status in August 1999. No overhaul records were found for serial no. 8084339. The DGs were not recovered from the crash site.
1.6.5.3. Precession
Pilots must monitor free gyro operations, because gyros precess at rates that can vary according to gyro system and natural precession phenomena. Gyro precession phenomena that are most commonly associated with flight operations consist of 2 types: real precession and apparent precession.
Real precession is induced in the gyro and is caused by mechanical imperfections, such as bearing wear or damage. The real precession tolerance for the DGs on C-GNWN was ±1° per hour.
Apparent precession is the result of the gyro property of rigidity in space and the earth's rotation with respect to space at 15.04° per hour. Two aspects of apparent precession result from the rotation of the earth (earth rateFootnote 21) and transport of a gyro across converging meridians (earth transport rateFootnote 22).
Table 6. Earth rate calculations for several positions along the track of FAB6560 for latitude controller set at 66°
UTC
FAB6560 position
Earth rate
(°/hour)
Compensated earth rate
(°/hour)
Residual earth rate
(°/hour)
1458:57
64° 00′ N, 112° 40′ W
13.52
13.74
0.22
66° 00′ N
13.74
13.74
0.00
1548:25
69° 07′ N, 105° 01′ W (CB)
14.05
13.74
−0.31
1549:13
69° 07′ N, 105° 01′ W (CB)
14.05
13.74
−0.31
1612:00
71° 40′ N, 101° 15′ W
14.28
13.74
−0.54
UTC: Coordinated Universal Time
CB: Cambridge Bay
Table 7. Earth transport rate calculations for 2 segments of the track of FAB6560
Period start
Period end
Longitude change
(°/hour)
Mid-latitude
Earth transport rate
(°/hour)
UTC
Position
UTC
Position
1458:57
64° 00′ N,
112° 40′ W
1548:25
69° 07′ N,
105° 01′ W
−9.28
66° 34′ N
−8.51
1549:13
69° 07′ N,
105° 01′ W
1612:00
71° 40′ N,
101° 15′ W
−9.92
70° 23′ N
−9.34
1.6.5.4. Horizontal situation indicator
The HSI displays aircraft position and heading with respect to magnetic or true north, selected heading, distance measuring equipment (DME), lateral deviation to or from a selected VOR or localizer course, and vertical deviation from the centre of a glideslope beam (Appendix E). The aircraft was equipped with 2 HSIs: 1 on the captain’s instrument panel and the second on the FO’s instrument panel.
Several flags incorporated into the HSI provide positive monitoring of several parameters. The flags are positioned out of view when the proper operating voltage is present. There was nothing to indicate any flags being present on the crew’s HSIs.
1.6.6. Autopilot system
1.6.6.1. General
The aircraft had an SP-77 autopilot system and dual FD-108 flight director systems. These systems were designed to function independently and were not integrated. Control of each of them was via the mode control panel (MCP) located on the glareshield (Photo 1).
Photo 1. Autopilot/flight-director mode control panel
The captain’s flight director controls are on the left side of the MCP; the autopilot controls are in the centre of the MCP; and the FO’s flight director controls are on the right side of the MCP. Separate selections on all 3 are necessary to configure each independent system (Appendix F). The autopilot and flight director systems use analog computers and do not contain non-volatile memory.
The autopilot system controls the aircraft about the pitch and roll axes and provides automatic aircraft stabilization whenever the pitch and roll channels are engaged. Various mode selections enable the pilots to command the autopilot to fly the aircraft onto a selected VOR or localizer course (VOR/LOC mode), as well as to make automatic approaches to runways equipped with instrument landing system (ILS) facilities (AUTO APP mode).
The pilots may also manually control the aircraft in a normal manner with the control wheel and column (control wheel steering [CWS]) without disengaging the pitch or roll axes of the autopilot system. Pilots can then assist the autopilot system in flying to a selected heading or course. Use of CWS does not disengage either channel of the autopilot system. The autopilot system was modified from the original design to allow for the use of GPS guidance for the course signals to the autopilot (section 1.6.10).
The autopilot system can be coupled either to the VHF NAV radio system or to the GPS system. To couple the autopilot to the GPS, the autopilot select switch is set to A/P ON GPS.Footnote 23 If something occurs to uncouple the autopilot from the GPS, such as a loss of GPS signal or selecting NAV on the captain’s MD-41 GPS annunciator control unit, the autopilot will revert to obtaining its navigational input from the VHF NAV radio system. However, the A/P ON GPS annunciator will remain illuminated until the autopilot select switch is set to the off (not illuminated) position.
The position of the crew autopilot controls is as shown in Appendix G.
In the system’s default state, the autopilot and the captain’s flight director obtain steering information from VOR/ILS receiver no. 1, and the FO’s flight director obtains information from VOR/ILS receiver no. 2. See section 1.6.10 for information on GPS interface with the autopilot.
1.6.6.2. Control wheel steering
The aircraft may be manoeuvred in pitch and roll after autopilot engagement using the control wheel and column. Manual inputs by the pilots using CWS are the same as required for manual flight. Two force levels are required to move the control column or wheel out of the centre (detent) position to induce pitch or roll commands.
A low detent force (4 pounds in the roll axis and 5 pounds in the pitch axis) is required to move the control wheel out of the centre (detent) position. This force is comparable to the force required during manual flight. After overcoming this resistance, the command to pitch or roll is at a rate proportional to control-wheel or column force.
High detent force (8 pounds in the roll axis and approximately 18 pounds in the pitch axis) is provided to prevent inadvertent disengagement of various submodes. The force required to move the control wheel or column out of the detent position is increased. If reversion to CWS inputs only (no automatic heading, course, radio, or pitch commands) is desired, it may be accomplished by exerting a force greater than high detent level.
1.6.6.3. Conditions and limitations for localizer capture
With either VOR/LOC or AUTO APP mode selected on the autopilot mode selector, the autopilot will intercept and capture the localizer, provided that the intercept angle is between 10° and 90°.Footnote 24
In the LOC capture submode, maximum bank angle command is limited to 25°, and the roll rate is limited to 7° per second. Lateral beam sensor is used to process the LOC deviation signal. This mode uses LOC deviation signal, LOC deviation signal rate, and course error (based on the selected course). The autopilot will initiate a turn toward the localizer when the LOC deviation signal becomes less than 150 millivolts (mV) (2 dots as indicated by the course deviation bar).
The autopilot transition to LOC on course submode occurs when the LOC deviation signal is less than 80 mV (about 1 dot), the cross-beam rate is less than 2 mV per second, and the bank angle is less than 6°. Once in LOC on course submode, the maximum bank angle is limited to 8°. The roll rate limit remains at 7° per second. Other than the bank angle limit change, there is no indication to the pilots when autopilot VOR/LOC submode has changed from capture to on course.
1.6.7. FD-108 flight director system
1.6.7.1 General
The flight director systems provide the pilots with visual commands to maintain the aircraft on pre-selected lateral and vertical flight paths. There are 2 independent systems installed: 1 for the captain and the other for the FO.
The flight director computers receive inputs from various navigation systems, depending on the selected mode of operation (Appendix H). Additionally, the attitude reference system provides inputs of aircraft roll and pitch attitude. The flight director computers process these input signals and generate roll and pitch attitude commands for maintaining the desired flight path. The roll and pitch commands are displayed on the attitude director indicator (ADI). The armed or capture mode of operation is displayed on the approach progress display (APD).
1.6.7.2. Flight director limitations on localizer capture
The intercept angle is limited to 30° (heading angle with respect to the selected course).
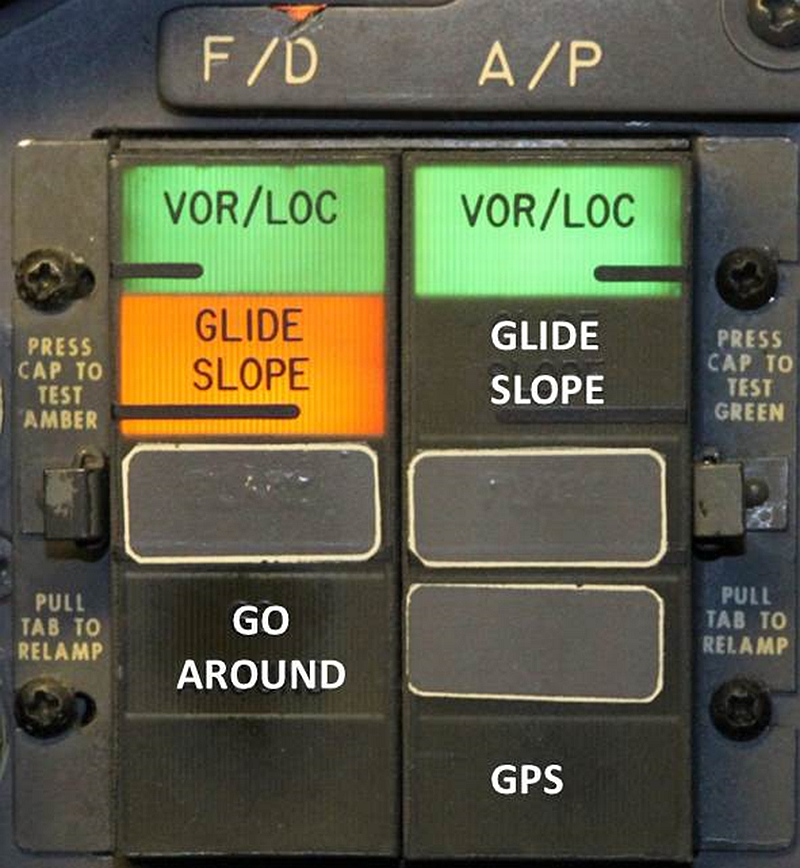
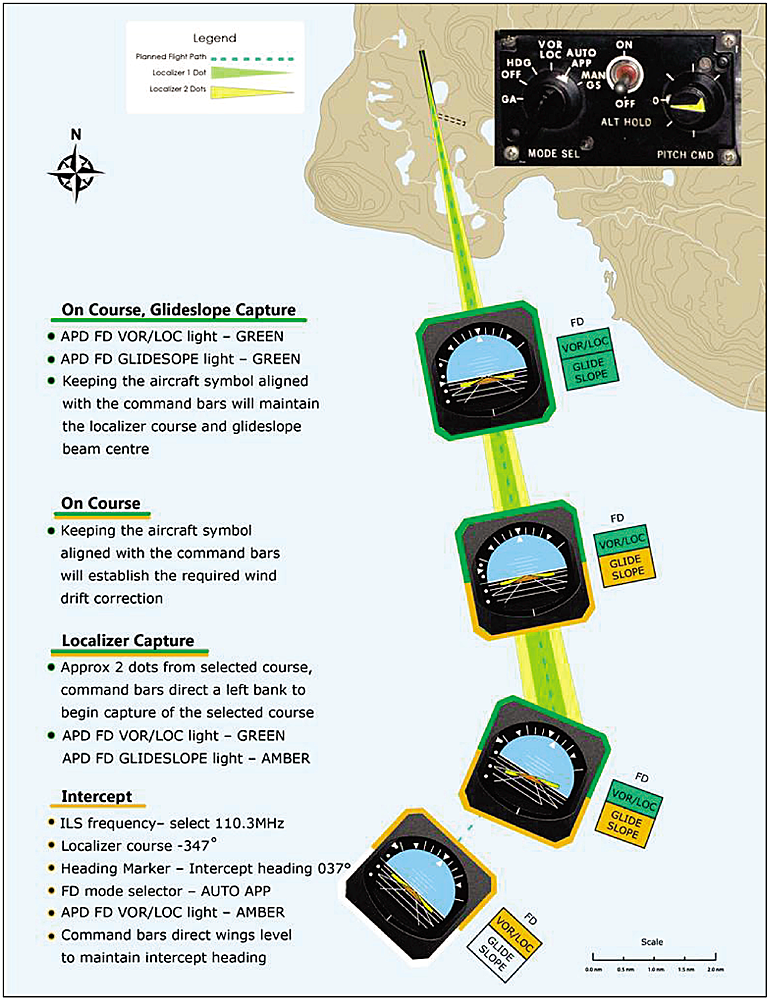
With the flight director in VOR/LOC mode and with a valid VOR or LOC signal, the flight director APD VOR/LOC annunciator will illuminate green once LOC capture occurs (LOC deviation less than 2.5°). During the 90 seconds after LOC capture, if the LOC deviation signal exceeds the limit (2.5° for the localizer), the flight director will revert from LOC capture to LOC intercept, and the flight director APD VOR/LOC annunciator light will change colour from green to amber.
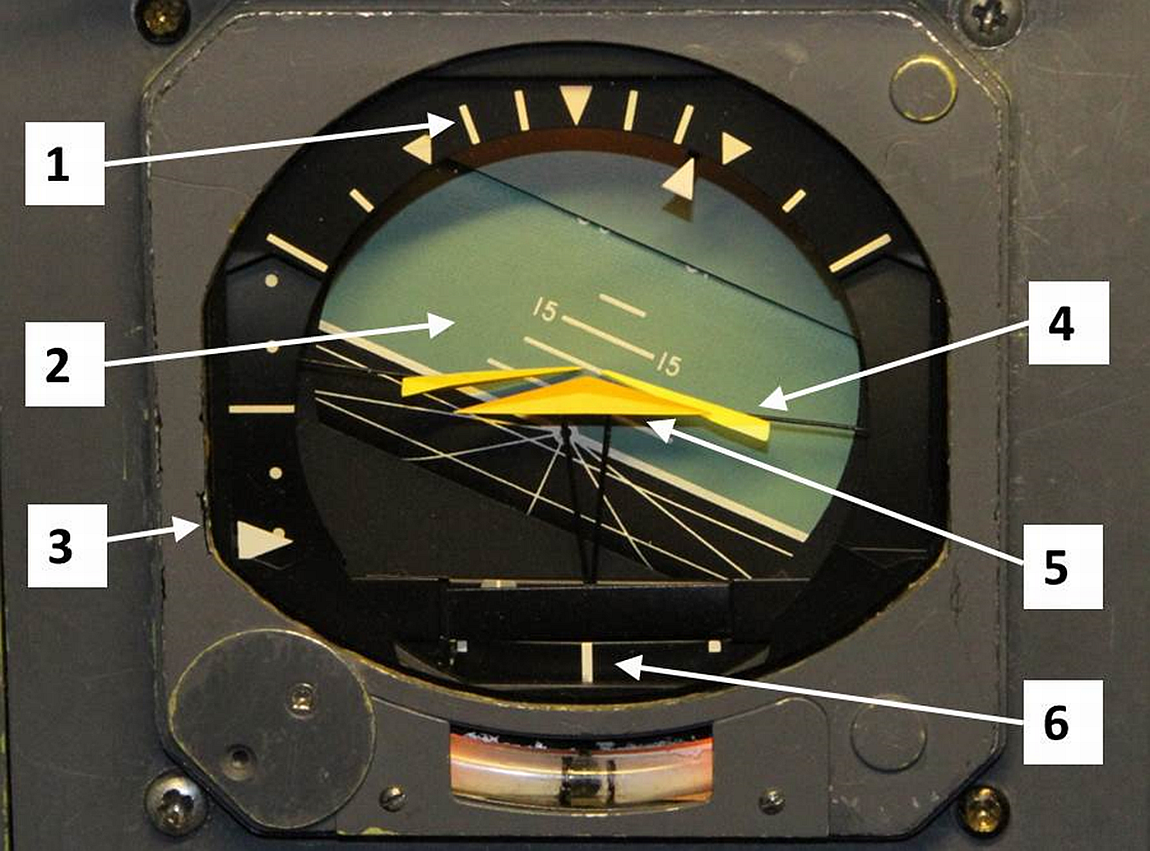
1.6.8. Attitude director indicator
One ADI on each pilot’s instrument panel displays the aircraft pitch and roll attitude, a fixed aircraft symbol, and flight director steering command bars (Figure 2).
Figure 2. Exemplar attitude director indicator (ADI)
The flight director command bars are driven by separate inputs for pitch and roll. The command bars move in unison to display integrated pitch and roll guidance commands corresponding to flight director roll and pitch mode selections. To satisfy the commands, the aircraft is manoeuvred so that the aircraft symbol becomes snugly aligned with the command bars.
Because the 2 flight directors operate independently of each other, the captain’s command bars will provide different commands than the FO’s unless identical mode selections have been made. The command bars are deflected out of view when the flight director mode is OFF or when signal inputs are unreliable.
In HDG SEL mode, the command bars display commands to turn toward and maintain the selected heading.
When the flight director steering computers sense that the aircraft is within 2.5° of the centreline of the localizer beam and VOR/LOC or AUTO APP mode has been selected, the flight director command bars provide attitude guidance commands based on the aircraft orientation relative to the localizer beam. Once the aircraft exceeds 2.5° from the localizer centreline, the VOR/LOC annunciator will change from green to amber as the system changes from capture to intercept mode. In the intercept mode, the command bars provide guidance to fly to and maintain the selected heading on the HSI.
Flags incorporated into the ADI provide positive monitoring of several parameters. The flags are positioned out of view when the proper operating voltage is present. The pilots did not discuss any flags being present on their ADIs.
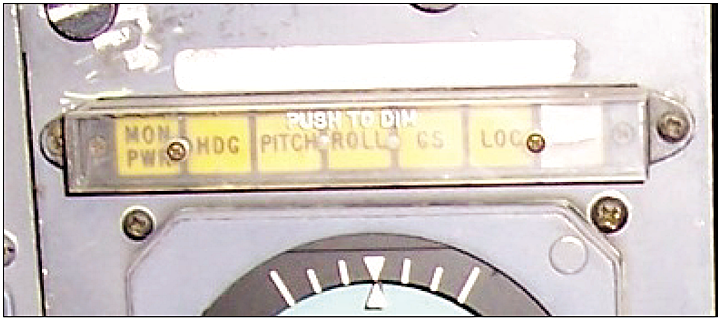
1.6.9. Approach progress display annunciators
The APDs provide annunciation of the autopilot and flight director systems armed and capture status for different operating modes. There are 2 APDs: 1 on the captain’s instrument panel and the second on the FO’s instrument panel. See Appendix H for configuration and functionality of the APDs.
1.6.10. Global positioning system
There were 2 Trimble TNL-8100 GPS systems on the aircraft. This type of GPS unit does not store any track data. The TNL-8100 meets the TSO C129 standard and is certified for en-route, terminal, and non-precision instrument approach navigation. The GPS units provide information to the autopilot and both HSIs. GPS information is not provided to the flight directors.
During the period from December 2010 until the occurrence, there were 5 maintenance record entries for the GPS. Two of these entries were for database updates (05 July 2011 and 27 July 2011). On 29 June 2011, the no. 2 GPS was written up for a heading failure. It was ground-checked as serviceable. On 30 June 2011, the GPS was not operating at departure time. The no. 2 GPS was replaced, checked and found to be serviceable. On 25 July 2011, the no. 1 GPS would not accept true airspeed input. The no. 1 GPS was rebooted and checked as serviceable.
The 2 GPS systems are controlled by 2 control display units (CDUs) located on the centre console between the pilots. No. 1 GPS is on the captain’s side, and no. 2 GPS is on the FO’s side. Each CDU has a screen to display desired information, including aircraft position relative to desired track (Photo 2). In the case of CYRB Runway 35T, the ILS localizer centreline is closely aligned with the area navigation (RNAV) final approach track. Therefore, the GPS screen can provide the crew with positional information relative to the localizer if the RNAV approach is loaded into the flight plan.
Photo 2. TNL-8100 control display unit (CDU) screen, showing right-of-track indication
Each system has a MD-41 GPS annunciation control unit. The MD-41 enables the pilot to select either VHF NAV or GPS information to be displayed on the HSI course deviation bar. MD-41 no. 1 is located on the captain’s instrument panel (Photo 3), and MD-41 no. 2 is located on the FO’s instrument panel. When the NAV/GPS switch is depressed, the MD-41 will annunciate NAV in white, or GPS in green, indicating which source is displayed on the HSI.
Photo 3. The no. 1 global positioning system (GPS) CDU, no. 1 MD-41 annunciator panel, and A/P SELECT switch
The A/P SELECT annunciator/switch is located on the centre instrument panel immediately above the standby attitude indicator.
When the no. 1 MD-41 is selected to GPS and the A/P SELECT annunciator/switch is depressed, A/P ON GPS illuminates green, and the autopilot system is provided with information from GPS no. 1 rather than VHF NAV radio data. The autopilot may be disconnected from the GPS by deselecting the A/P SELECT annunciator/switch. Selecting NAV on the no. 1 MD-41 will remove the GPS signals from the autopilot, although the green A/P ON GPS annunciator will remain illuminated.
The GPS will automatically revert to TRUE mode when the compass controller MAG/DG switches are selected to DG.
1.6.11. Emergency locator transmitter
The aircraft was equipped with a Honeywell Rescu 406AF-type emergency locator transmitter (ELT). When activated automatically by impact forces or manually, the ELT transmits a distress signal to aid in detection and location by search and rescue personnel. The 406-megahertz (MHz) type ELT sends out digitally encoded data that uniquely identify the aircraft on which it is installed.
1.7. Meteorological information
1.7.1. Cloud ceiling height
Cloud layers are reported based on the summation of the layer amounts as observed from the surface up. Layer amounts are reported in eighths (oktas) of sky coverage. FEW is from greater than 0 to 2/8 summation amount; SCT is from 3/8 to 4/8 summation amount; BKN is from 5/8 to less than 8/8 summation amount; and OVC is 8/8 summation amount. A cloud ceiling is said to exist at the height of the first layer for which a coverage symbol of BKN or OVC is reported.Footnote 25
1.7.2. Yellowknife weather at departure
The routine aviation weather report (METAR) for CYZF at 1400 was: wind 090°T at 11 knots, visibility 15 statute miles (sm) in light rain showers, broken cloud at 5500 feet above ground level (agl), broken cloud at 8000 feet agl, broken cloud at 11 000 feet agl, temperature 9°C, dewpoint 7°C, and altimeter 29.87 in. Hg.
1.7.3. Resolute Bay weather issued before departure
The Resolute Bay area was under the influence of a trough of low pressure extending southeastward from a low pressure system centred at 80° N, 115° W at 0700. The trough was moving northeastward at 10 knots. The area was forecast to have broken clouds based at 2500 feet above sea level (asl) and topped at 14 000 feet asl, with visibility greater than 6 sm. The area was forecast to have patchy portions (25% to 50% of the area) with 4−6 sm visibility in light rain and mist, and ceilings at 600–1500 feet agl. The area was also forecast to have localized ceilings as low as 200 feet agl, with visibility as low as 1 sm.
The METAR for Resolute Bay (CYRB) at 1400 was: wind 160°T at 14 knots, visibility 15 sm, broken cloud at 900 feet agl, overcast cloud at 7000 feet agl, temperature 7°C, dewpoint 6°C, and altimeter 29.79 in. Hg.
An aerodrome forecast (TAF) was issued for CYRB at 1138. Weather at 1645 was forecast to be: wind 150°T at 15 knots, visibility greater than 6 sm in light rain, scattered cloud at 500 feet agl, overcast cloud at 1200 feet agl; temporarily between 1200 and 2000: visibility 2 sm in light rain and mist, and overcast cloud at 500 feet agl, with a 30% probability of overcast cloud 400 feet agl between 1200 and 2000. At 1344, the TAF was amended, and for the period of arrival, it read: wind 170°T at 12 knots, visibility greater than 6 sm, scattered cloud at 800 feet agl, overcast cloud at 7000 feet agl; temporarily between 1300 and 2000: visibility 2 sm in light rain and mist, and overcast cloud at 800 feet agl, with a 30% probability of overcast cloud at 400 feet agl between 1300 and 2000.
1.7.4. Resolute Bay weather issued while FAB6560 was en route
A special weather report (SPECI) for CYRB, issued at 1434, read: wind 170°T at 16 knots, visibility 15 sm in light drizzle, and overcast cloud at 500 feet agl. Another SPECI, issued at 1450 and provided to the crew by a company dispatcher at 1455, read: wind 170°T at 13 knots, visibility 5/8 sm in light drizzle and mist, vertical visibility 200 feet; remarks: fog 8 oktas.
At 1451, the CYRB TAF was amended a second time and, for the period of arrival, read: wind 170°T at 15 knots, visibility greater than 6 sm, scattered cloud at 500 feet agl, overcast cloud at 7000 feet agl; temporarily between 1400 and 2000: visibility 2 sm in light rain and mist, overcast cloud at 500 feet agl.
The CYRB METAR for 1500, provided to the crew by a company dispatcher at 1510, read: wind 180°T at 16 knots, visibility ½ sm, runway visual rangeFootnote 26 for Runway 35 2200 feet in light drizzle and fog, vertical visibility 200 feet, temperature 6°C, dewpoint 6°C, altimeter 29.79 in. Hg; remarks: 8 oktas fog. Another SPECI was issued at 1533 and read: wind 170°T at 8 knots, visibility 5 sm in light drizzle and mist, and overcast cloud at 600 feet.
The METAR at 1600, provided to the crew by NAV CANADA at 1609, read: wind 180°T at 8 knots, visibility 10 sm in light drizzle, overcast cloud at 700 feet agl, temperature 6.3°C, dewpoint 6°C, and altimeter 29.81 in. Hg. No other weather observations were issued to the crew.
1.7.5. Resolute Bay weather issued after the accident
A SPECI for CYRB, issued at 1649, was as follows: wind 180°T at 13 knots, visibility 5 sm in light drizzle and mist, and overcast cloud at 300 feet agl.
Criteria exist for the issuance of SPECI weather reports to disseminate changes in previously observed weather conditions. For visibility changes, a SPECI is not required until visibility decreases below 3 miles. For ceiling, a SPECI is required when ceiling decreases below 500 feet, and again at 100-foot increments.Footnote 27
1.7.6. Upper winds
The operational flight plan (OFP) for FAB6560 and upper wind forecasts showed that the flight would experience increasing tailwinds between Cambridge Bay and CYRB. The OFP showed a tailwind of 63 knots at the top of descent (TOD).
1.7.7. Weather Received by the Crew
Company dispatchers prepare the OFP, including weather and NOTAM (notice to airmen) information, and place it on a company file transfer protocol (FTP) server for download by the crew. The FAB6560 OFP, including NOTAM and weather information, was not recovered from the crash site, and electronic copies of this information were automatically deleted from the company’s computer system.Footnote 28 It is almost certain that the OFP issued by First Air Dispatch at 1035 included current METAR and TAF information for CYRB. The company operations room at CYZF had a computer terminal with access to NAV CANADA weather information, and the crew could have obtained subsequently issued weather by this means.
1.8. Aids to navigation
1.8.1. Navigational aids
Navigational aids (nav-aids) serving Resolute Bay (CYRB) included the Resolute Bay non-directional beacon (RB NDB), the YRB VOR (VHF omnidirectional range) with associated distance measuring equipment (DME) (not used for CYRB instrument approach procedures), and the IRBFootnote 29 instrument landing system (ILS) with associated DME. The airport is served by an ILS/DME approach for Runway 35T (Appendix C). Additionally, area navigation (RNAV) approaches based on the global navigation satellite system (GNSS) serve both Runway 17T and Runway 35T (Appendix B). There were no reported outages of nav-aids at the time of approach of FAB6560.
NAV CANADA conducted an airway flight check of the RB NDB in November 2010, which showed that the NDB accuracy was within ±5° in the vicinity of where the FAB6560 compasses were reset. NDB systems are required by Transport Canada (TC) to be maintained within a certain range of accuracy:Footnote 30
NDB systems are flight checked to an accuracy of at least ±5° for an approach and ±10° for en route. However, much larger errors are possible due to propagation disturbances caused by sunrise or sunset, reflected signals from high terrain, refraction of signals crossing shorelines at less than 30° and electrical storms.
Another aircraft successfully completed the ILS/DME Runway 35T approach approximately 20 minutes after the accident. As a precautionary measure, the ILS was flight-checked by NAV CANADA on 22 August 2011. The system was declared serviceable.
1.8.2. Possible interference with Resolute Bay instrument landing system functionality
The issue of whether there could have been interference with the CYRB instrument landing system (ILS) functionality by military activity on the CYRB airfield, or by any other navigational approach aid, was investigated.
The ILS localizer signal is continuously measured and monitored, and shuts down if the transmitter is outside tolerance. The Resolute Bay ILS Runway 35T monitor data were recorded, and showed that the guidance signal was stable and was not affected by any interference. Aircraft avionics also discriminate unwanted signals and filter out non-guidance noise, and create a flag alarm if the signal level is insufficient. There was no mention by the crew of any flag alarms being displayed on the aircraft avionics.
Other nav-aids, such as VOR, have a frequency chosen such that it can operate in harmony with the ILS frequency. Any interference originating from a VOR would be missing a guidance signal, thereby generating an aircraft avionics flag alarm, and would not contain a Morse code identification. Radar frequencies are outside the ILS range, would be rejected by aircraft avionic filters, cannot provide a guidance signal, and are missing a Morse code identification; and the pulsed nature of the signal cannot clear an avionics flag alarm.
1.9. Communications
1.9.1. General
The first contact between FAB6560 and Resolute Bay (CYRB) terminal occurred at 1626:27, when the flight was 80 nautical miles (nm) from CYRB. Readability was initially unsatisfactory, and satisfactory 2-way communication was not established until 1629:49 (56 nm from CYRB). Once 2-way communication was established, communication between FAB6560 and the CYRB terminal and tower was effective. The following subsections describe communication activities not previously discussed in section 1.1.
1.9.2. Arrival and approach of KBA909
A second instrument flight rules (IFR) aircraft, KBA909, was approaching CYRB from the southeast. Initial contact between KBA909 and CYRB tower occurred at 1639:49. The radar data showed KBA909 entering the Class DFootnote 31 control zone at approximately 1640:55. It was travelling toward the airport at an altitude of 2200 feet above sea level (asl) at 158 knots. At this time, FAB6560 was 2.4 nm from the airport, travelling at 183 knots, descending through 1100 feet asl. At 1642:25, KBA909 reported 7 miles southeast of the field. KBA909 reported overhead the RB beacon at 1645:05 commencing the instrument landing system (ILS) back course Runway 17T procedure. This report occurred about 3 minutes after the last transmission from FAB6560. KBA909 subsequently conducted a missed approach, followed by the ILS Runway 35T, and landed at 1708.
1.9.3. Communication search for FAB6560
To reduce the possibility of conflict with an aircraft experiencing a communication failure, article 611.1E of NAV CANADA ATC MANOPS directs controllers to suspend or restrict, to the extent necessary, the movement of other aircraft in the vicinity of the destination airport for 30 minutes after the latest of the following times:Footnote 32
The estimated time of arrival furnished by the aircraft;
The estimated time of arrival calculated by the IFR unit;
The estimated time en route included in the flight plan;
The expect-approach-clearance time last acknowledged by the aircraft; or,
If an approach clearance has been acknowledged, the time at which the aircraft is known or estimated to have commenced the approach.
When FAB6560 did not land and could not be contacted, the tower controller concluded that the aircraft had lost communications and was likely carrying out a missed approach. However, the requirements of article 611.1E were not applied.
NAV CANADA ATC MANOPS article 624.1Footnote 33 directs controllers to inform the appropriate joint rescue coordination centre (JRCC) of information regarding an IFR or controlled visual flight rules (CVFR) aircraft that is in any one of uncertainty, alert or distress phases. An alert phase is a search-and-rescue term, and refers to the situation that exists when an aircraft has been cleared to land and fails to land within 5 minutes of the estimated time of landing and communication has not been re-established with the aircraft.Footnote 34 CYRB tower was the controlling agency at the time, and was responsible for alerting JRCC that FAB6560 was in the alert phase.
At 1645:20, about 3 minutes after the last FAB6560 transmission, the CYRB tower controller transmitted a call to FAB6560 requesting its location. Again at 1646:34 and at 1648:14, the tower controller attempted contact with FAB6560 and decided that the aircraft had probably done a missed approach and had lost communications. During this time, the CYRB ground controller contacted the fire hall to advise it to standby for a possible emergency.
At 1647, the CYRB ground controller contacted the CYRB Community Aerodrome Radio Station (CARS) operator seeking information on FAB6560. The CARS operator advised that he had not heard any calls from FAB6560 for a while. At about this time, a vehicle was dispatched by CYRB tower to survey the airfield and runway approaches for any sign of the aircraft. None was reported.
At 1654:50, the CYRB ground controller contacted a NAV CANADA Arctic Radio operator in North Bay to inquire about FAB6560, and was told that the flight had been delayed. The Arctic Radio operator did not note where this information had originated. At 1657:02, the CYRB ground controller called First Air cargo to try to determine what the delay may have been.
At 1657:56, the Arctic Radio operator contacted the NAV CANADA Edmonton Area Control Centre (ACC) seeking information on the whereabouts of FAB6560. Edmonton advised that the flight’s estimated time of arrival (ETA) had been 1645 and that the system did not show the flight’s arrival.
At 1706, the fire hall was asked to place the fire trucks on standby on the airfield. At 1714, the CYRB tower controller contacted the NAV CANADA Edmonton ACC Flight Planning section and advised that FAB6560 had been cleared to land and that there had been no further communication with the aircraft. The NAV CANADA Edmonton ACC advised that it would contact First Air to determine whether the company had information that the aircraft might have done a missed approach. When First Air advised the NAV CANADA Edmonton ACC that it had no information on a possible missed approach by FAB6560, the NAV CANADA Edmonton ACC controller called JRCC Trenton to report the missing aircraft.
At 1719, as the clouds obscuring the hill lifted to some extent, personnel near the CYRB control tower saw smoke and flames on the higher terrain to the east of the runway. The CYRB tower controller immediately declared an emergency and dispatched the fire vehicles to the scene via the only available route, which was a road that passed north of the runway and then up the hill on which the VOR was situated. All required agencies were then informed of the accident.
During the communication search for FAB6560, some of the agencies that would normally be advised that the aircraft was in the alert phase for search and rescue were made aware of the missing aircraft. However, there was no formal declaration of an alert phase by the military control tower in CYRB. There were no emergency checklists available to the military controllers to verify appropriate actions.
1.10. Aerodrome information
1.10.1. Resolute Bay airport
Resolute Bay Airport (CYRB) is owned and operated by the Territory of Nunavut Airports Authority. There is 1 operational runway, 17/35 aligned 167/347°T. A second, abandoned, runway is depicted on flight information publications. Runway 35T is 6504 feet long by 197 feet wide, with a gravel surface. The longitudinal slope from the threshold of Runway 35T is up 0.93% for the first 4700 feet, and then down 0.40% for the last 1800 feet of the runway. The airport elevation is 222 feet above sea level (asl), and the Runway 35T touchdown zone elevation is 197 feet asl. Runway 35T is equipped with a high-intensity simplified short approach lighting system with runway alignment indicator lights, threshold and runway end lights, and high-intensity runway edge lights, all with 5 settings. During the approach of FAB6560, the approach and runway lights were set to setting 5, the brightest available setting.
There is no aircraft rescue and firefighting (ARFF) capability located at CYRB. The emergency response plan for the airport, however, lists the resources and responsibilities of the personnel who are involved in the response to various emergency situations. The roles of the CARS operator, the CARS supervisor, the senior administrative officer, the senior airport representative, the Royal Canadian Mounted Police (RCMP), the village volunteer fire department, the fire chief, the village medical services and ambulance, the airline representative, and the transportation programs manager are listed with required actions and information flow charts. The village volunteer fire department is capable of fighting structural fires, but has no foam capability for aircraft fires and is not trained for aircraft firefighting and rescue.
1.10.2. Operation NANOOK additional resources
As part of Operation NANOOK, the Canadian Military established a fully staffed fire hall on the airport, equipped with 2 Oshkosh TA 1500C fire trucks, each carrying 750 litres of foam, 6000 litres of water, 225 kilograms of dry chemical, as well as handheld fire extinguishers and self-contained breathing apparatus. As well, a fully staffed medical facility was established on the airport. Several military helicopters (Griffon and Sea King) and a Coast Guard helicopter were situated in CYRB at the time of the accident.
1.10.3. Community aerodrome radio stations
Community aerodrome radio stations (CARS) provide aviation weather and communications services at designated sites in the Yukon, Northwest Territories, Nunavut, and Northern Québec. CARS facilities are equipped with meteorological instruments for monitoring and recording aviation surface weather, and communications equipment for providing operational information to pilots. CARS are operated by observers/communicators who are usually recruited locally.
CYRB is served by a CARS unit, which is housed in the airport terminal building. During the occurrence, the CARS was staffed as required, with 1 observer/communicator who continued to perform the weather observing program and other normal CARS tasks, with the exception of communicating with aircraft to provide operational information. That task had been assumed by the Canadian Military air traffic control (ATC) unit that was set up to support Operation NANOOK.
Weather observations taken by the CARS staff are transmitted by computer to Environment Canada and NAV CANADA.
1.11. Flight recorders
1.11.1. General
Both the flight data recorder (FDR) and the cockpit voice recorder (CVR) were located in the debris field on the day of the accident, and were transported to the TSB laboratory on 21 August 2011.
1.11.2. Flight data recorder
The aircraft was equipped with a Honeywell solid-state FDR (model SSUFDR, part no. 980 4120 RQUS). The memory module was successfully downloaded.
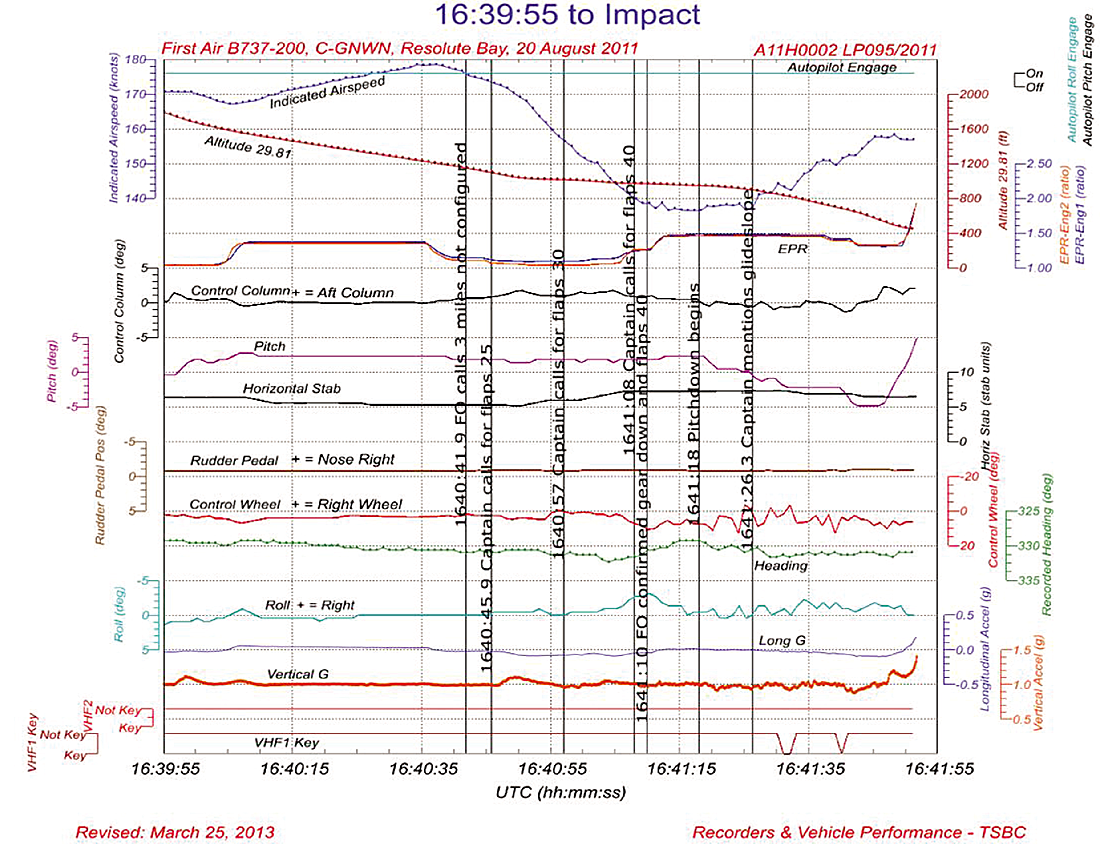
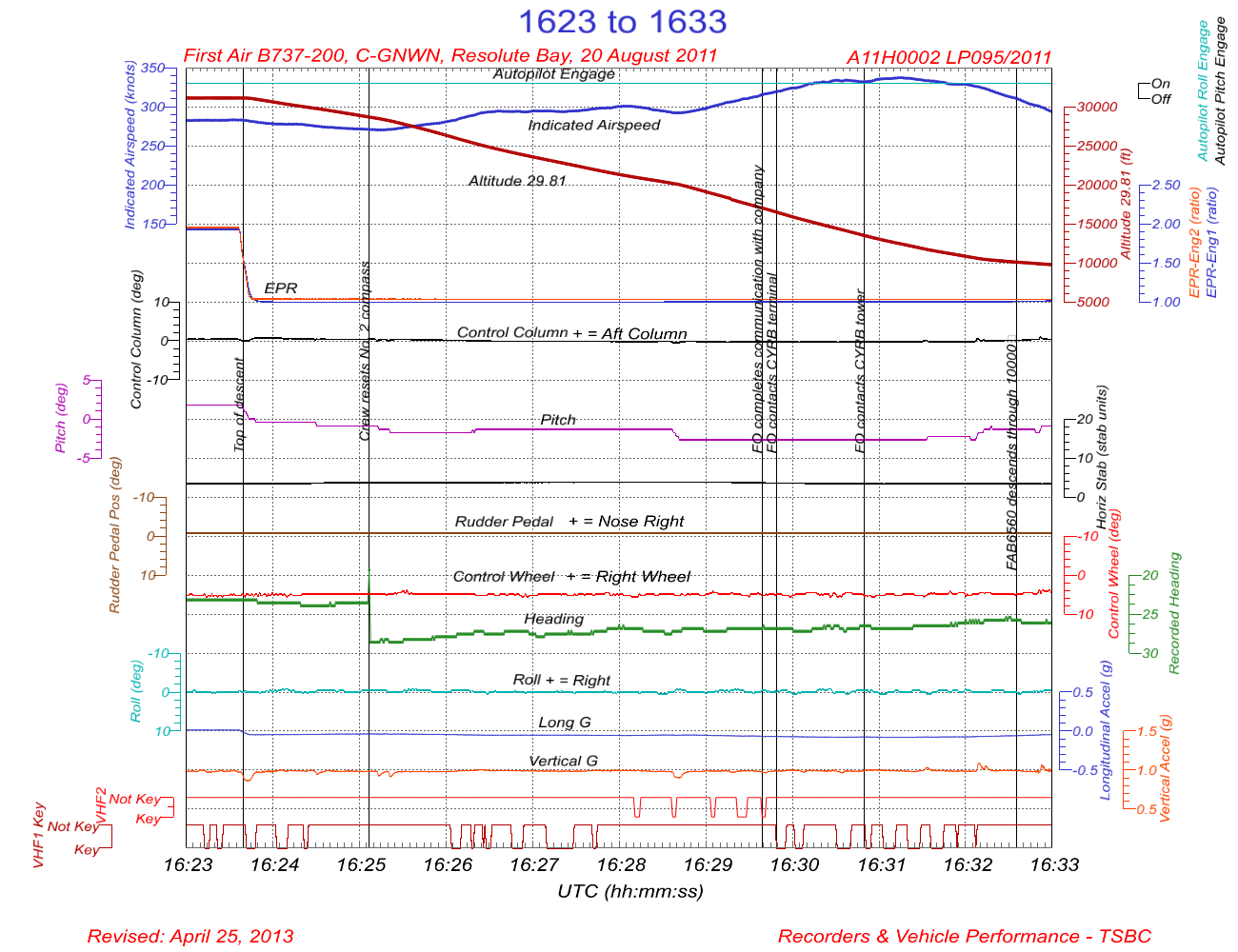
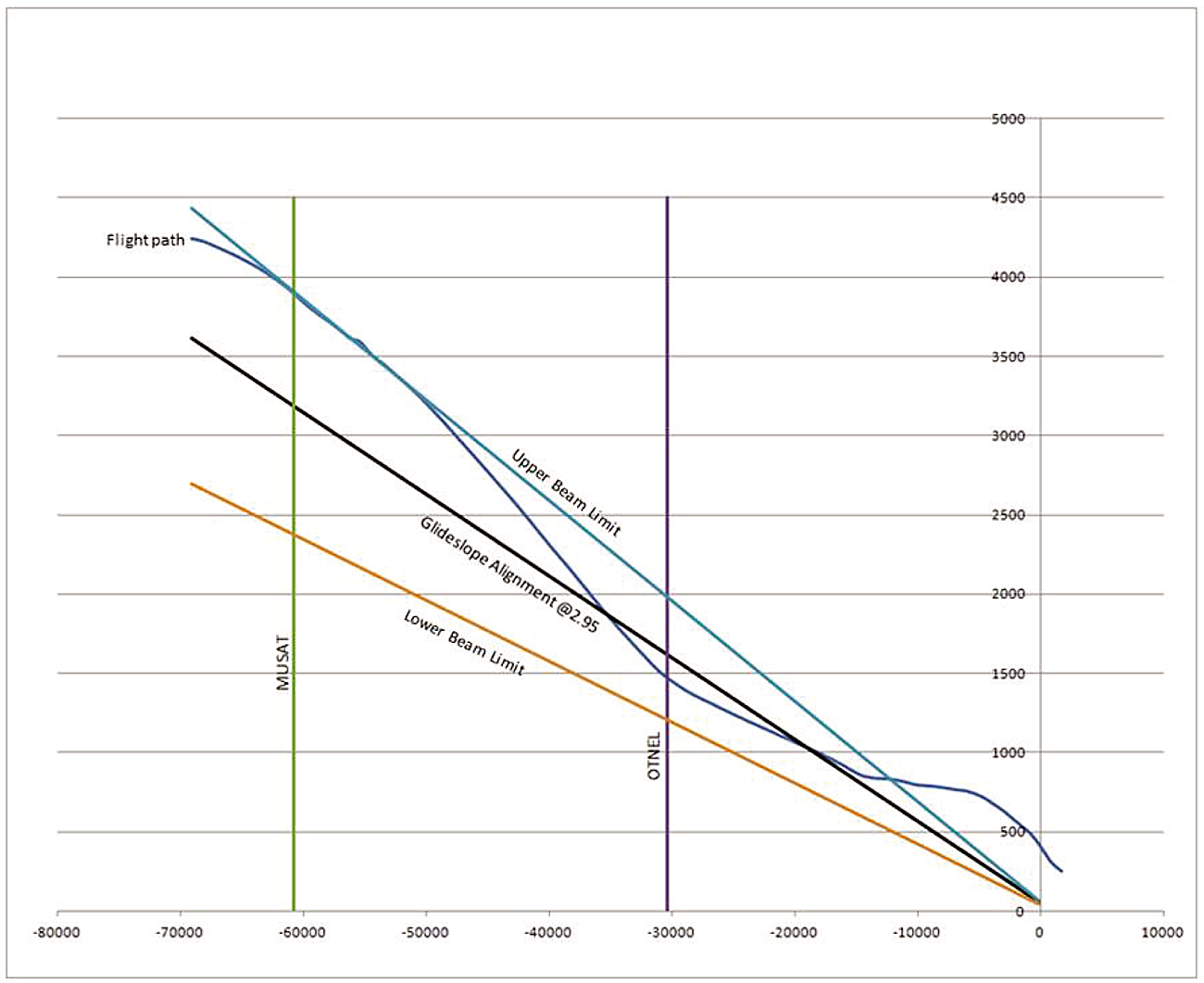
The FDR recorded a total of 24 parameters. It contained approximately 27 hours of flight data, which included the occurrence flight and 17 previous flights. Appendix I through N show segments of various stages of the flight. Appendix O and Appendix P show the flight path in relation to glideslope and localizer as derived from FDR and radar data.
1.11.2.1. Flight data recorder data discrepancy
A data discrepancy was noted during the take-off portion of the accident flight. All of the values of the recorded parameters were inconsistent with the expected behaviour. Shortly after levelling off at the cruising altitude of 31 000 feet, a sudden discontinuity in the data occurred; the data then appeared to become valid and remained valid until impact. The invalid data lasted for approximately 19 minutes. Three of the other previous flights had also contained similar anomalies at the start of the flights. All of the anomalies exhibited the same characteristics, namely, that they were present from start-up and affected all parameters. The only common distinction between the invalid data portions was that the invalid data began at start-up. The length of time each data set remained invalid was different. For the three additional flights exhibiting anomalous data at start-up, the length of time varied from 10 minutes to over 20 minutes.
1.11.2.2. Guidance for flight data recorder maintenance
Canadian Aviation Regulations (CAR) Standard 625, Appendix C, requires a data correlation check to be completed.Footnote 35 The paragraph containing this stipulation also refers the reader to EUROCAEFootnote 36 ED-55Footnote 37 for guidance on FDR maintenance, including correlation checks. The purpose of the FDR correlation check is to ensure that all required parameters are being recorded and are of an acceptable quality.
ED-55 requires maintenance personnel to replay at least 15 minutes of flight data. First Air was conducting its FDR correlation checks in accordance with Appendix C of CAR Standard 625. The TSB reviewed previous data downloads that First Air had collected for past correlation checks. These downloads showed that the data recording problem found on the accident FDR had existed since at least March 2008, but remained undetected due to the limited data review required by ED-55 (15 minutes).
In June 2007, the TSB provided a briefing regarding “Problems experienced with flight recorders” to the Transport Canada (TC) Avionics Standardization Workshop. The briefing included issues related to FDR correlation checks and maintenance. TC included an article entitled “Issues with FDR and CVR Data Identified as a Result of TSB Reviews” in Aviation Safety Letter Issue 3/2008.Footnote 38 The purpose of the article was to prompt operators and maintainers to revisit their last flight recorder checks.
The TSB continues to find problems with FDR data, some of which should have been identified and rectified during the annual correlation checks. This situation could be due, in part, to the outdated content of the CAR Standard 625, Appendix C.
EUROCAE specifications are recognized internationally and are cited in the International Civil Aviation Organization (ICAO) Standards and Recommended Practices. In 2003, ED-55 was superseded by ED-112. ED-112 was published to update flight recorder specifications, and provides enhanced guidance for FDR maintenance. The guidance for the data correlation check was also enhanced and requires the data sample to include a whole flight, from start-up to shutdown. Further amendment of ED-112 is ongoing, to reflect the most current technical information.
1.11.2.3. Aircraft track calculation
The FDR did not record positional data or time. The military radar data were validated by the TSB Laboratory and used along with the surveyed impact markings to determine the flight path with respect to the runway at Resolute Bay (CYRB).
The radar data were used to calculate the aircraft track. The recorded altitude, indicated airspeed and heading parameters were then used to create a flight path. The flight path was then linearly interpolated to the track, which resulted in a smoothed and accurate flight path.
The aircraft position data were used to calculate the aircraft ground track and ground speed. The forecast wind speed and direction were then used to calculate the aircraft drift, heading and true airspeed. The resulting aircraft heading and true airspeed were compared to the results of the flight path calculation, and there was good agreement between the parameters.
1.11.2.4. Heading data
The FDR receives heading information from the no. 2 compass. All data recorded on the FDR from engine start until 1458:57.5 were invalid; consequently, no heading information is available for this portion of the flight. The valid recorded no. 2 compass heading data for the remainder of the flight were examined by TSB investigators.
Due to the anomalous take-off data, it could not be determined whether the take-off occurred in degrees magnetic, and if it did, at what point the heading was unslaved and was set to degrees true. At 1625:07, the heading parameter was shifted, indicating a heading adjustment made by the flight crew. The heading recorded on the FDR compared to the estimated actual aircraft heading was approximately 20° different at the time of impact.
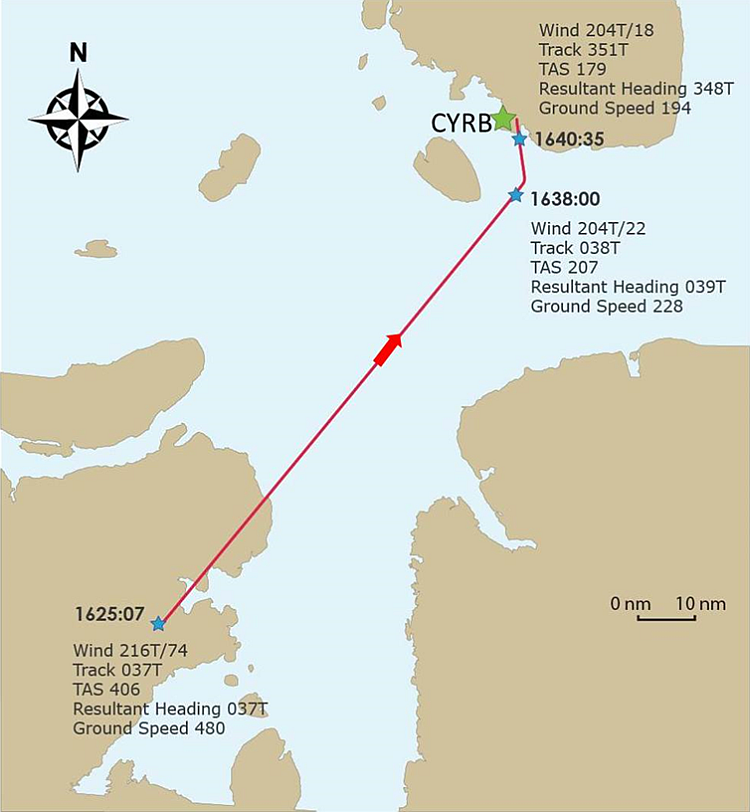
A wind triangle may be used to make calculations of unknown variables if sufficient other variables are known (Figure 3 and Table 8).
Table 8. Summary of wind triangle calculations (grey shaded areas are calculation results)
1625:07 no. 2 compass re-slaved
1638:00 before turn at MUSAT
1640:35 on short final approach
Altitude
FL280
4300 feet asl
1240 feet asl
KTAS
406
207
179
Wind (°T/knots)
216/74
204/22
204/18
Radar ground track (°T)
037
038
351
Resultant ground speed (knots)
480
228
194
Resultant heading (°T)
037
039
348
Recorded no. 2 compass heading (°)
029
024
331
Heading differential (°)
−8
−15
−17
KTAS: knots true airspeed
asl: above sea level
At the times indicated for the compass calculations in Table 8, the FDR data showed the aircraft in a wings-level attitude.
The FDR data showed periods during which the recorded heading parameter changed substantially while the aircraft was flying wings-level. Two examples are from the commencement of valid data at 1458:57.5 to 1548:25 and again from 1549:13 to 1612:00. During both periods, the recorded heading slowly changed at a rate of +25° per hour. Another example, in which the drift was in the opposite direction, occurred from 1625:08 to 1635:10 at a rate of −18° per hour. TSB investigators consulted with Boeing, Honeywell, Western Avionics, First Air, and the Royal Canadian Air Force (RCAF) School of Air Navigation in an effort to determine why this compass behaviour occurred. No conclusive answer was determined.
1.11.2.5. Control wheel input data
The FDR recorded several control wheel movements that could not be accounted for by autopilot operation: between 1638:49 and 1638:57, at 1639:18, and at 1639:36.
1.11.3. Cockpit voice recorder
The aircraft was equipped with a Honeywell solid-state CVR with a minimum recording capacity of 30 minutes. The memory was downloaded successfully and contained good-quality audio of the final 31 minutes of the flight.
1.11.3.1. Flight data recorder and cockpit voice recorder synchronization
The CVR timing was converted to Universal Coordinated Time (UTC) by synchronizing the audio with the air traffic control (ATC) recordings received from NAV CANADA. The FDR was then synchronized with the CVR by comparison of the VHF keying recorded on the FDR. The sampling rate for VHF keying is once per second; consequently, the possible error in the CVR/FDR synchronization could be ±1 second.
1.12. Wreckage and impact information
1.12.1. Impact
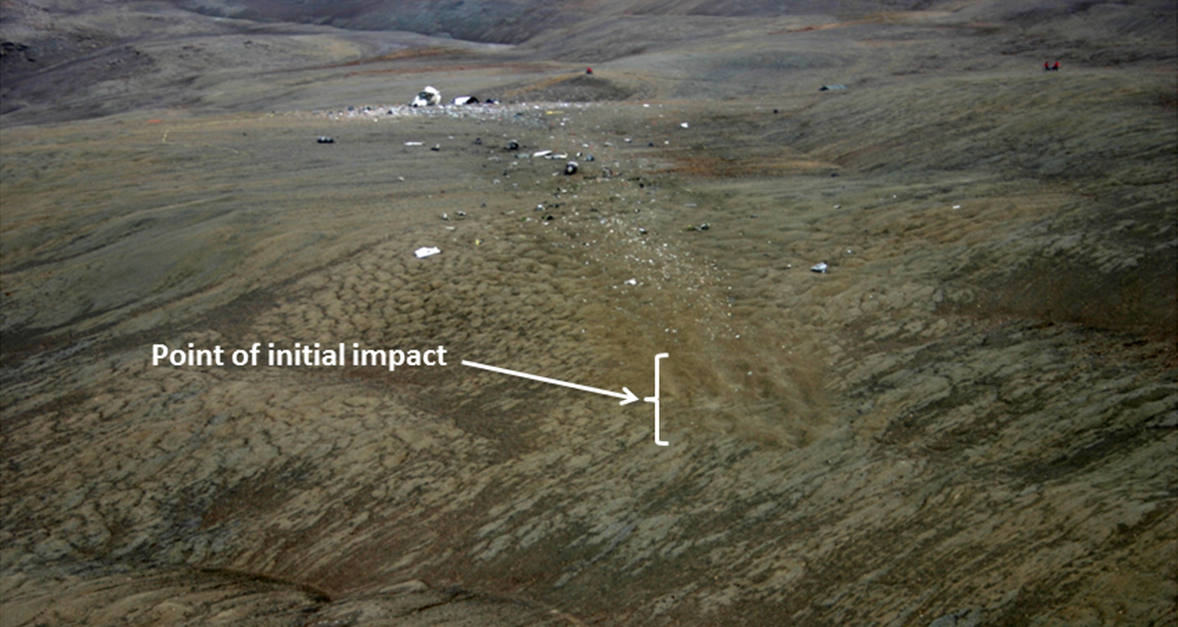
The aircraft collided with the shoulder of a hill approximately 1 nautical mile (nm) east of the mid-field of Resolute Bay (CYRB). It struck up-sloping terrain at 396 feet above sea level (asl) in a 5° nose-up, wings-level attitude, before rebounding into the air, shedding components along the debris trail. The aircraft continued in a ballistic arc over the crest of the shoulder and contacted the slightly down-sloping ground along the plateau formed by the top of the shoulder (Figure 4).
The secondary contact was approximately 590 feet down-range from the initial impact location. The aircraft broke into 3 main sections (the empennage, the centre fuselage and wings, and the forward fuselage/cockpit) as it slid along the ground. The empennage and centre fuselage remained on the plateau; the forward fuselage/cockpit continued further along the debris field and came to rest in a gully formed by a stream that drained into Strip Lake (Photo 4).
The debris trail developed in a NNW direction, following a bearing of approximately 344°T. The debris trail had an overall length of 1400 feet from the point of initial impact to the cockpit. The widest section of the debris trail was about 320 feet. One wheel came to rest at the bottom of the hill east of Strip Lake.
All of the damage to the aircraft structure found in the debris trail was due to contact with the ground. All of the principal structural components of the aircraft were accounted for in the debris trail. No evidence was found to suggest that there was any structural failure unrelated to ground contact.
The extensive breakup of the aircraft and severe post-crash fire damage made it impossible to conduct a complete survey of all of the fracture surfaces. However, all those fracture surfaces that were examined exhibited features that were consistent with an overstress mode of failure. No sign was found of pre-existing fatigue failures.
The centre portion of the fuselage and right wing had been exposed to a severe post-crash fire. None of the wreckage found in the debris trail earlier to that point showed any evidence of fire damage. No sign was found to suggest that there had been a fire on board the aircraft before the crash.
Damage to the no. 1 and no. 2 engines was consistent with an impact while operating with high rotational energy. The similarities in the damage between the 2 engines suggest that both engines were rotating at comparable speeds. Both engines were operating normally and responding to inputs before impact.
The VHF NAV selector switch was recovered in the CAPT ON AUX position. Microscopic examination determined that the switch was likely in the NORMAL position before impact but had been forced into the CAPT ON AUX position due to impact forces.
All 3 VHF/NAV receivers were recovered in damaged condition. The receivers were examined under supervision of the TSB at the Rockwell Collins facilities in Irving, Texas, on 12 December 2011. The examination determined that both the no. 1 and no. 2 receivers likely had an instrument landing system (ILS) frequency selected. The examination could not determine the tuning position of the no. 3 receiver. Because the VHF NAV selector switch was likely in the NORMAL position, the no. 3 receiver would not have been actively in use at the time of the accident.
Disassembly and microscopic examination of the captain’s NAV/Com control panel determined that the NAV selector had a setting of 110.30 (ILS frequency for CYRB) at the time of impact. The distance measuring equipment (DME) selector dial was set to DME. The FO’s NAV/Com control panel was found with the NAV selector set at 110.30. The DME selector dial was set to DME.
No information could be obtained from examination of the automatic direction finding (ADF) components.
The compass transfer switch was a locking toggle-type switch that was recovered in the BOTH ON 1 position. Microscopic examination revealed that the switch had likely been in the NORMAL position before impact and had been forced into the as-received position due to impact forces.
Damage to the compass controllers precluded determination of pre-impact condition or switch settings. The post-impact position of the latitude knob on the no. 1 and no. 2 compass controllers was 68° and 66°, respectively.
Laboratory examination of the instrument comparator bulbs could not make any conclusion as to their illumination state at impact. There was no information on the cockpit voice recorder (CVR) regarding illumination of the heading comparator annunciator at any time during the flight.
Laboratory examination concluded that the wide no. 2 ADF/VOR bearing pointer on the captain’s radio-magnetic indicator (RMI) was indicating between 315° and 320° at the time of impact. No other conclusions could be made regarding pre-impact condition. Examination of the FO’s RMI could not make any conclusions as to pre-impact condition.
The captain’s horizontal situation indicator (HSI) had a broken face glass, and the internal components were damaged. As received, the indicated heading under the lubber line was 330°, the course counter was set to 298°, the DME indicator was showing 000, and the heading bug was set to 330°. Based on mud-pattern analysis of the displays, the course counter appears to have been set to 328° and the DME indicator was displaying 010 when the face glass broke. There were no other conclusive markings on the instrument.
The face glass from the FO’s HSI was broken, leaving the dial face exposed. As received, the indicated heading under the lubber line was 320°, the course counter was set to 340°, the DME indicator was showing 600, and there were no heading bugs present. A paint smear on the compass card that was consistent with the edge of the pointer coming into contact with it placed the course deviation bar at an indication of 1 dot left of centre. The course counter appears to have been set to 343° when the face glass broke, based on examination of the mud pattern on the display. There were no other conclusive markings on the instrument.
Laboratory examination of both HSIs could not make any conclusions as to their pre-impact condition.
Although various autopilot components were recovered, it was not possible to conclusively determine any of the settings at the time of the accident, as there were no definitive markings and no downloadable non-volatile memory in the various components.
Engineering examination of the aircraft’s annunciator lamps gave uncertain results. None of the annunciators exhibited any stretch or uncoiling typically associated with filaments that were hot at the time of impact, even for annunciators that were expected to have been on. It is therefore possible that some annunciators may have been on at the time of the initiation of the impact, but appeared off when analyzed.
Engineering examination of the non-volatile memory from the 2 GPS units revealed the following information:
Both contained the current database, which had an expiry date of 25 August 2011.
Both units had the same data on them.
Both units showed that the aircraft had deviated to the right of the desired track.
It was not possible to determine what scale the control display units (CDUs) were set to at the time of the occurrence, as this information resets when the unit loses power.
The last position was noted to be 74° 42.96′ N, 094° 55.04′ W.
OTNEL was the currently selected waypoint.
The active flight plan was noted to be VIA RNAV35:
Direct to MUSAT 1200 feet
OTNEL (final approach fix) 1000 feet (this indication was in purple, showing that it was the target point)
RW35 (missed approach point) (this indication was in green, showing that it is the next point in the list)
CYRB
1.13. Medical and pathological information
There was nothing to indicate that the captain’s or FO’s performance was degraded by physiological factors.
1.14. Fire
At 1706, the fire hall was asked to place the fire trucks on standby on the airfield. At 1719, as the clouds obscuring the hill lifted to some extent, personnel near the control tower reported seeing smoke and flames on the higher terrain on the east side of the runway. The ground controller immediately declared an emergency and dispatched the fire vehicles to the scene. The fire response vehicles proceeded from the airfield up to the accident site via the access road to the VOR antenna. Progress was slow due to the reduced visibility on the hill. The fire chief, call sign Red Leader, kept the tower advised of the progress, and just past the VOR, indicated that the terrain was too treacherous for continued driving. Red Leader dismounted from the vehicle to better assess conditions. At the same time, Red Leader requested that as many all-terrain vehicles (ATVs) as possible be dispatched to better access the site and to carry supplies to the firefighters.
At 1731, Red Leader advised that the aircraft was in sight but still obscured and was some distance away. He reported a small fire, which he determined could be attacked by the firefighters, and requested that the ATVs, on arrival at the fire vehicles, pick up extinguishers and self-contained breathing apparatus, because the vehicles could proceed no further due to a ravine. At this time, the remaining firefighters dismounted, equipped themselves with 2 fire extinguishers each from the vehicles, and ran to the accident site, reported to be about 800 m distant.
The firefighters quickly extinguished the fire in the fuselage of the aircraft and then assisted first responders to secure the site and treat the survivors.
1.15. Survival aspects
1.15.1. Rescue response
At 1737, Red Leader was informed that there were 15 people on board the aircraft. At 1741, Red Leader reported that 3 survivors had been located and the search for others was being organized in accordance with rescue procedures. The other crew and passengers were found to have died on impact.
As the clouds lifted, an RCAF Griffon helicopter was dispatched from the airfield to the site. At approximately 1739, a search-and-rescue technician on board was able to direct the helicopter to the most appropriate landing site so as not to disturb the firefighting operation. Stretchers arrived on scene, and the 3 survivors were loaded aboard the helicopter and airlifted directly to the military’s hospital at approximately 1755. The survivors were subsequently airlifted out of Resolute Bay (CYRB) on a military CC-177 transport aircraft at 2211, and arrived in Iqaluit, Nunavut, at 0031. All 3 survivors were eventually transferred to hospitals in Ottawa, Ontario.
1.15.2. Emergency locator transmitter
There was no record of any agency detecting an emergency locator transmitter (ELT) signal from the aircraft. The investigation determined that the ELT had been installed with the activation switch in the OFF position and therefore could not automatically transmit upon impact. The cable leading from the ELT to its antenna was severed on impact, which would have significantly reduced the transmission signal had the ELT been armed. It was also determined that the aircraft interface module (dongle) contained the identifier code from the previous aircraft on which it was installed. Having the incorrect identifier programmed in the ELT would not have prevented it from performing as designed, but it would have indicated to Search and Rescue that a different aircraft was transmitting an emergency signal.
For the occurrence flight, the aircraft was configured with 5 cargo stations and 4 rows of passenger seating. The flight attendants were seated behind the fourth row of passengers, on the left side of the aircraft. The occupied sections of the aircraft were extensively damaged during the accident sequence.
The belly of the centre fuselage was partially torn off, consistent with the wreckage dragging on the ground before coming to rest. The floor of the passenger cabin completely separated from the fuselage and was extensively broken up. A section of floor containing the 4 left-side rows of passenger seats came to rest 372 m (1222 feet) from the initial impact, between the aft and centre fuselage sections. The right-side floor and passenger seats were extensively broken up and scattered across the debris field. The flight attendant seats had separated from the aircraft structure. The forward fuselage section and cockpit experienced severe structural breakup. The flight compartment windows and surrounding structure, nose landing gear well, forward pressure bulkhead and nose radome were separated from the fuselage. The pilots’ seats had separated from the floor.
The restraint system used to prevent occupants, cargo, and components from striking each other within the aircraft is commonly referred to as the tie-down chain. This tie-down chain consists of the seat belt and anchorage, shoulder harness and anchorage, seat structure and anchorages, and floor. Failure of any component in the tie-down chain will greatly increase the risk of injury. In this accident, failures were noted in all of the occupants’ body restraint systems.
All of the seats contained broken and/or deformed framing and/or seat backs, pans, and arm rests. It is likely that some of this damage was caused by ejected seats colliding with the ground with significant momentum. These observations indicate that the forces acting upon the seat structure and attachments as a result of the breakup sequence exceeded their design strength.
It was noted that seat damage was more significant where the aircraft structure was more extensively damaged, such as the right outboard seats and the flight attendants’ row, which was coincident with the separation between the centre and aft fuselage sections. It is considered likely that these seats separated earlier during the breakup sequence. Consequently, they would have had greater momentum, allowing them to travel over more distance than the left-side seats; hence the greater damage observed.
At the time of the crash, the pre-landing passenger briefing had been carried out and the cabin had been secured for landing. There was no indication that the flight attendants were aware of any need to prepare the cabin for an emergency in advance of the crash. Neither flight attendant survived the crash, so they were not involved in any post-crash evacuation, firefighting, or first aid efforts. The survivors were seriously injured, but were sufficiently mobile to assist each other to the edge of the debris field and clear of the fire and smoke, where they awaited rescue.
The post-crash examination determined that some of the passenger lap belts may not have been tensioned tightly around the hips of the occupants. Medical information indicates that loose lap belts did not contribute to the extensive injuries sustained by the occupants. There were no indications of an association between a loose lap belt and the occupant being ejected from their seat. Therefore, there were no indications that the adjustment and positioning of the lap belts was contributory to the survivability of this accident for either adults or children.
1.16. Tests and research
The TSB conducted a series of sessions in a B737-200 simulator located in Vancouver, British Columbia, from 19 to 20 March 2012. The purpose of these simulator sessions was to:
Familiarize investigators with:
B737 cockpit layout, ergonomics, and procedural workflow;
Operation of the autopilot, flight director, and VHF navigation systems; and
Crew interfaces with these components; and to
Evaluate occurrence approach scenarios developed by investigators.
Four separate simulator sessions were conducted over the 2-day visit, resulting in 36 total runs. Attendees included personnel from the TSB (test director, human performance investigator, and multimedia specialist), US National Transportation Safety Board (NTSB) (operations and human performance investigators), First Air (management and training pilots), and Boeing (systems and engineering investigators). The simulator was operated by a First Air representative, while representatives from First Air and Boeing piloted the simulator.
The simulator was equipped with the same autopilot and flight director systems as installed in C-GNWN. As the simulator was not equipped with GPS, this component could not be simulated.
The simulator sessions fulfilled the above-listed objectives. The testing showed the following:
The autopilot mode could be forced to revert from VOR/LOC to MAN by the pilot manually putting force on the control wheel in excess of the applicable detent force without inducing any roll.
The use of autopilot VOR/LOC mode resulted in either intercepting and tracking or convergence with the localizer in every case.
1.17. Organizational and Management Information
1.17.1. First Air
First Air is the trademark name used by Bradley Air Services Limited. First Air corporate offices are located in Kanata, Ontario, and its main operating base is in Ottawa, Ontario. Sub-bases are located in Baker Lake, Cambridge Bay, Hall Beach, Iqaluit, Kugluktuk, and Resolute Bay, Nunavut; as well as in Yellowknife, Northwest Territories. The company employs approximately 1000 people.
The organization provides both scheduled and non-scheduled domestic and international air transportation services for passengers and for all types of cargo, including dangerous goods. The company operates Boeing 737, Boeing 767, ATR 42, ATR 72, and Lockheed L382 Hercules aircraft in Canadian Aviation Regulations (CAR) Subpart 705 operations. At the time of the accident, the company operated 6 B737 aircraft, with 45 pilots.
1.17.1.1. First Air operational manuals
First Air policies common to all company flight operations are contained in the First Air Flight Operations Manual (FOM).
Section 1.8.1 of the FOM provides the company's policy regarding standard operating procedures (SOPs) availability and usage. Aircraft type-specific information, including SOPs, is contained in the applicable aircraft operations manual (AOM), the First Air B737 Operations Manual, issued to each flight crew member. The AOM and amendments are approved by Transport Canada (TC), and they replace the aircraft flight manual. Pilots are required to have a working knowledge of these documents.
The AOM is structured in a three-volume format. Volume 1 is devoted to phase- and condition-of-flight information, consisting of bulletins, limitations, emergency and abnormal procedures, normal procedures, and supplementary procedures. Amendment 23 of Volume 1, dated 21 June 2011, was current at the time of the accident.
Volume 2 contains the individual systems explanation and is designed to communicate functional characteristics that are within the parameters of the flight crew operation. Amendment 3 of Volume 2 was current at the time of the accident. Volume 3 and Volume 3, Supplement 1, contain performance data. Amendment 9 of Volume 3 was current at the time of the accident.
FOM section 1.8.1 concludes with the following statements:Footnote 39
No deviation from AOM standard operating procedures is acceptable unless the PIC determines that the safety of the flight may be compromised. In this event, the deviation must be thoroughly understood by all flight crew members.
1.17.1.2. Aircraft operations manual: normal procedures
First Air uses a scan/flow philosophy whereby, for normal operations, pilots initiate certain actions (scan/flows) from memory and most of the items within a scan/flow are confirmed by completing the accompanying checklist. The challenge-response concept is used for all normal checklists. Responses must be audible and clear, and any response other than that required by the checklist is considered incorrect. The checklist item must be repeated until the correct response is made. Checklists are normally read by the FO when the aircraft is on the ground, and by the pilot not flying (PNF) when in flight.
Where the checklist requires a multiple response, the order of response on the ground will be captain then FO, and in flight, PF then PNF. When a checklist is complete, the FO (or PNF in flight) will confirm completion by stating that it is completed, e.g., ”Before-Start Checklist Complete“. A note on this page specifies that final landing gear and flap position shall always be confirmed by the captain.
The AOM indicates the company's expectations as follows:Footnote 41
It is the responsibility of all crew members to call to the Captain's attention, any situation that is not normal. It is not assumed that the Captain is a
ware of the problem. POINT IT OUT! This applies to all flight procedures, ground procedures and any time the aircraft is crewed … The Captain is solely responsible for strict adherence to checklist philosophy.
Figure 5. First Air B737 dynamic checklist (source: First Air B737 Operations Manual, Volume 1, Amendment no. 23 [21 June 2011], page 03.10.1)
The dynamic checklist is affixed to the left and right control wheels and contains the before-take-off and airborne-based items of the normal checklist for use when the aircraft is moving (Figure 5).
Page 03.20.3 of the AOMFootnote 42 describes checklist format, specifying that a dashed line is placed in the checklist to indicate a break in the sequence, and that some action (e.g., NAV radios set for the approach, etc.) must occur before the checklist can proceed. When the checklist is being read and the next item is the line, the challenger will state “Down to the line.” The in-range checklist has a dashed line.
While the landing checklist is executed in 2 phases, there is no dashed line in either the amplified or dynamic landing checklist separating the 2 phases, as is the case with the in-range checklist.
In the past, at least 5 years before the accident, the landing checklist was accomplished when the gear was extended for landing. In response to an unstable approach event, the company revised its procedures so that the landing checklist would be initiated earlier in the approach and would be executed in 2 phases. The dynamic and amplified checklists were not revised. No consideration was given to inserting a line to signify a break in the checklist.
Pages 03.20.4 to 03.20.6 of the AOM describe checklist procedures. Item 4 addresses holding the checklist, and states the following:Footnote 43
When the Captain elects not to accomplish an item on the checklist when it is called, s/he will state “Hold the checklist at ( the item ). [sic] Note: The checklist will not proceed beyond an item until the item is accomplished and the proper response is given.
Item 5 addresses continuing the checklist, and states the following:Footnote 44
When the Captain desires to continue the checklist, s/he will state “Continue the checklist”. The checklist will then resume with the item at which it was held.
Company procedures for the use of the autopilot in MAN mode are contained in Appendix Q. Procedures for the operation of the autopilot in VOR/LOC and the flight director in AUTO APP are contained in Appendix R and Appendix S. The only abnormal or emergency procedure relating to the autopilot is the autopilot disengaged procedure. The action for this procedure is for the crew to manually fly the aircraft. There are no abnormal or emergency procedures for the flight director.
1.17.1.3. Crew incapacitation and two-communication rule
Section 10.24.1 of the FOM addresses pilot incapacitation as follows:Footnote 45
Incapacitation of an individual can be either obvious (gross) or subtle (partial). Obvious incapacitation can be caused by anything from heart failure to a speck of dust in the eye. Subtle incapacitation can be caused by anything from a brain tumor to a mental lapse caused by stress.Footnote 46
Recognition of obvious incapacitation, by definition, presents no problem. Subtle or partial incapacitation is particularly insidious in that the non-functioning pilot can enter this state and may appear perfectly normal with eyes open and hands on the controls. Recognition of subtle incapacitation may take considerable time and presents a unique problem for the First Officer; that is, how far should he allow the aircraft to deviate before taking over control from the PIC. For these reasons, the “two communication rule” shall be adopted to reduce the risk of accident, especially in the critical phases of flight, the takeoff and initial climb and the approach and landing.
Section 10.24.2 of the FOM discusses the company's two-communication rule as follows:Footnote 47
Whenever the other pilot does not respond to two consecutive verbal communication attempts with either a reply or by executing a corrective flight manoeuvre you will say “I have control” (if you are not already the pilot flying) and will take over control of the aircraft until it can be ascertained that the lack of response was not caused by incapacitation.
Whenever incapacitation occurs, whether obvious or subtle, the procedure is as follows:
Assume control and fly the aircraft to a safe situation, or engage autopilot (if available);
Restrain and/or remove the incapacitated pilot, with the assistance of a Flight Attendant (if available);
Reorganize the cockpit and prepare for landing;
Arrange for an ambulance to meet the aircraft.
Throughout the recorded portion of the flight, the captain of FAB6560 was verbally responsive to the FO's comments and suggestions, and was making control inputs.
At the time of the accident, other than the two-communication rule, the company did not have any policies, procedures, or training providing guidance as to how an FO could escalate from an advisory role to taking control of the aircraft from the captain. Pilot interviews revealed that most of the captains were surprised and uncomfortable when asked how an FO could take control from a captain who was not clearly incapacitated.
1.17.1.4. Compass operations in Northern Domestic Airspace
The company's policies and procedures for compass use in Northern Domestic Airspace (NDA) are described in Appendix T. Included is the procedure for obtaining true heading using GPS and non-directional beacon (NDB). The output of this procedure is the true heading, which is displayed under the radio-magnetic indicator (RMI) lubber line.
The company's intent, although not specifically mentioned in the AOM, is that use of the destination NDB to obtain a bearing on the GPS minimizes the effect of earth transport precession rate. Most destinations in the company's area of operations are served by an NDB that would be the only usable NDB for an arriving flight. This was the case for Resolute Bay (CYRB) and the Resolute Bay non-directional beacon (RB NDB).
1.17.1.5. First Air B737 pilot practices for compass operation
Pilot interviews revealed that practices varied somewhat, from full compliance with the AOM to norms that deviated from the AOM substantially. For example, leaving CYZF northbound, crews reported good compliance with the requirement to commence free directional gyro (DG) operations entering the NDA. However, on east-west flights operating to and from Rankin Inlet, Nunavut (CYRT), many pilots reported operating in MAG rather than switching to DG as required, because the magnetic variation at CYRT was only 4°.
Without exception, pilot practices for setting a true heading used the GPS/NDB procedure in preference to using the astro compass, and complied with the procedure shown in Appendix T. However, the timing and frequency of this procedure varied substantially. One pilot reported doing this procedure regularly throughout the flight, especially during descent to destination, while others reported that it was done only when required by the checklist.
No information was available regarding the FAB6560 crew practices; however, flight data recorder (FDR) and cockpit voice recorder (CVR) data show that the compasses were adjusted only once, at 1625:07, during the portion of the flight for which valid data were available. At this time, the RB NDB was the only NDB within range, at a bearing and distance from the aircraft of 029°T at 91 nm.
Pilots reported the company's B737 compasses would sometimes differ to the extent that the heading comparator would illuminate. These instances would resolve when the compasses were allowed to slave if operating in MAG, or were reset if operating in DG.
Pilots reported varied practices regarding setting the latitude controller. Some would set the controller to the approximate mid-latitude of the route being flown, while others would use the current latitude at the time when the compass was being set. No information was available regarding the FAB6560 crew practices.
1.17.2. Adaptations of standard operating procedures
1.17.2.1. General
SOPs and checklists are critical information resources that provide procedural guidance to pilots for the operation of an aircraft. They assist with pilot decision making and with the establishing of shared mental models between the pilots, and provide pilots with predetermined successful solutions to various situations by accounting for risk factors that may not be readily apparent to a pilot during normal operations or an abnormal/emergency situation.
While it is impossible to develop checklists or procedures for all possible contingencies, following the appropriate checklist or procedure will provide pilots with the safest and most efficient course of action in most cases. However, if checklist and procedural discipline is not taught, practised, reinforced, and monitored, there is a danger that pilots will deviate from prescribed procedures or respond inappropriately to unusual situations.
People rarely follow rules or instructions precisely. They do so for reasons and in ways that make sense to them given their circumstances, knowledge, and goals.Footnote 48
While policies and SOPs are prescribed by a company to set boundaries for safe operations, individuals may experiment with the boundaries in order to become more productive or obtain some other benefit. This experimentation leads to adaptations of procedures and to a shift beyond the prescribed boundaries described in the SOPs, toward unsafe practices.Footnote 49 Without intervention, the communication of successful adaptations between crew members will tend to lead to their spread throughout an organization.
Such adaptations are unlikely to be recognized as deviations by those within the group employing them. The adaptations slowly become normal behaviour, and the risk associated with them is unlikely to be recognized.Footnote 50 This tendency has been described as the normalization of deviance.Footnote 51
Without regular supervision, education, and enforcement of the expected boundaries, individuals are likely to continue to adapt procedures and cut corners until the actual unsafe boundary is found through the occurrence of a minor or major accident.
This investigation identified many instances where the FAB6560 flight crew deviated from SOPs. Investigators conducted structured interviews with 9 CYZF-based First Air B737 pilots to determine whether the deviations from SOPs extended beyond the crew of FAB6560.
The following sections describe key deviations by FAB6560 crew from the company's operating philosophy, policies, or checklist procedures. Some sections will include a discussion of B737 crew practices. Additional examples of crew practices are described in Appendix V. Amplified checklists for various phases of flight are located in Appendix U.
1.17.2.2. Cruise
1.17.2.2.1. Approach briefing
Approach briefings are normally conducted by the pilot flying (PF) before descent, as part of the pre-descent check. The PNF's monitoring duties, standard callouts and tolerances, as well as standard decision height callouts, should be confirmed by the PF before the PF's first approach of the day. Subsequent PF approach briefings may be abbreviated to include the items listed below, followed by a statement that standard company calls apply and a query as to whether there are any questions. The following information should be included in the approach briefing:
The approach chart name and effective date;
The intended nav-aid configuration through the approach and missed approach;
Minimum (temperature-corrected) altitudes at each point of the approach;
Decision height; and
Other items as appropriate, especially when operating into an unfamiliar airport (e.g., runway offset, displaced threshold, unusual approach lighting system, or other pertinent information that might influence the approach or landing).
Interviews revealed that pilots' practice was to conduct the approach briefing before top of descent, as was the case with FAB6560. This practice was in accordance with the AOM. However, briefings were commonly abbreviated when flying with familiar crew members, during good weather, and when flying the same approach for the second or third time during the day.
The captain of FAB6560 conducted the approach briefing at 1617:11. The speeds briefed were 132 (VREF),Footnote 52 137 (VREF + 5), and 147 (VREF + 15). See Appendix V for a description of these speeds. The briefing was incomplete, as it did not include the approach chart name or date, the intended nav-aid configuration, or minimum altitudes other than the decision height. Other information pertinent to the intended approach and landing was sky condition, visibility, and the tailwind, but none of these items were included in the approach briefing. It is possible that the pilots discussed some or all of these items earlier in the flight before the CVR recording began.
1.17.2.2.2. Descent planning
When approaching destination, the crew have to confirm the top-of-descent (TOD) point based on current conditions. On the B737, a chart to assist in performing this calculation is kept on the glareshield and is readily available to flight crews at all times.Footnote 53 The investigation used the First Air B737-200 Performance Quick Reference Handbook chart to calculate a TOD, based on the following information:
Cruise FL310,
Descent at idle thrust,
Speed of 0.70 Mach/280 knots above 10 000 feet /250 knots below 10 000 feet (upper left of chart),
Straight-in approach,
Transition to gear down,
Land flap at outer marker,
Operational flight plan (OFP) landing weight of 105 000 pounds,
OFP tailwind component at TOD of 63 knots.
Based on the distance-to-touchdown chart, the TOD in calm wind conditions would have been 100 nm. However, considering a tailwind component of 63 knots, an extra 17 miles (2.8 nm x 6 = 16.8) needs to be added, resulting in a TOD of 117 nm from touchdown at CYRB. The OFP provided a computer-calculated TOD point for FAB6560 of 117 nm from touchdown at CYRB.
At 1617:41, with the aircraft about 150 nm from touchdown at CYRB, the FO pointed out to the captain that their ground speed was high. While it could not be determined exactly what information the crew used to calculate the TOD, at 1617:44, the captain indicated that he planned to commence descent at 105 nm from CYRB.
1.17.2.3. Landing data card and airspeed bug settings
The landing data card (Appendix V) is used to set and verify landing data. It is normally completed by the PNF before the normal pre-descent procedures. Normally, the PNF will review the landing data card information after the airspeed bugs are set and before the approach briefing.
The landing data card for FAB6560 was not recovered. However, at 1617:11.9, the captain conducted the approach briefing, including approach speeds, and at 1624:40, both pilots referred to the airspeed bug setting during the pre-descent check. These events indicate that the landing data card had likely been prepared by the FO.
1.17.2.4. Pre-descent
Amplified checklist procedures are shown in Appendix U. In accordance with the AOMFootnote 54, the pre-descent checklist, including a public address (PA) announcement to the passengers, shall be accomplished before initiating final descent.
The captain conducted the approach briefing at 1617:11. The FO made a passenger PA announcement at 1621:06. As discussed above, the landing data card was likely completed.
The pre-descent scan/flow is initiated by the PF calling for the pre-descent checklist, and the only action item is for the PNF to indicate status change with 2 cabin chimes. Two cabin chimes occurred at 1624:31, indicating to the cabin crew a change in aircraft status.
During the pre-descent check, at 1624:37 and 1624:39 respectively, the captain and FO confirmed that the VREF bugs were set for 132 knots. In addition to the VREF bug, each pilot should also have set a bug to 137 (VAPP, or approach speed [VREF] corrected for wind) and another bug to 147 (VREF + 15).
FAB6560 commenced descent at 1623:40. The FAB6560 pilots executed the pre-descent checklist beginning at 1624:27. The compass portion of this checklist occurred from 1624:39.5 to 1625:13.7. During this exchange, the pilots verified that the compasses were in DG mode. At 1624:44, the captain stated, “… twenty-nine true”, and at 1625:04, the FO stated, “… zero three zero.”
At 1625:14, the FO called the pre-descent check complete.
1.17.2.5. Descent
1.17.2.5.1. Descent techniques
The normal descent from cruise is in a clean configuration. Speedbrakes may be extended to increase the descent rate or to reduce speed. There was no recorded information to indicate whether the captain of FAB6560 used the speedbrake during descent. Although not specified in the AOM, there are other means of adjusting a descent profile, such as increasing the distance flown by turning to a wider intercept angle or doing a 360° turn.
1.17.2.5.2. In-range check
Amplified checklist procedures are shown in Appendix U. The captain of FAB6560 called for the in-range checklist at 1632:46. The FO called and responded to the first 4 items. There was no mention of the auxiliary power unit (APU). At 1633:09, the captain instructed the FO to hold the remaining items on the checklist until later in the approach. The FO did not state, “In-range checklist complete down to the line.”
At 1636:23, the captain instructed the FO to proceed with the items below the dashed line. Both pilots responded to the NAV switches challenge (FO stated “NAV instruments”) with “VHF NAV”, and to the altimeters, instruments, and radios challenge with “Two-niner-eight-one inches set, cross-checked.” The FO then mentioned the RB NDB frequency (350 kilohertz), a requirement to keep the DME, and advised the captain that the altitude alerterFootnote 55 could be set to 2200 (25-nm-sector minimum safe altitude). The captain gave an affirmative response. The VHF NAV radios were not mentioned. At 1637:00, the FO called the in-range checklist complete.
1.17.2.6. Transition to final approach
Use of the flight director is recommended whenever on an instrument landing system (ILS) approach. According to First Air amplified checklist procedures, the autopilot and flight director, when used, should be set as follows:Footnote 56
ILS: Arm AUTO APP and steer aircraft using HDG SEL and ALT HOLD as required. Monitor APD annunciator for appropriate Armed/Capture Indications.
CAUTION: IF ABOVE THE GLIDE SLOPE, DO NOT USE AP MAN GS. INSTEAD USE CWS TO CAPTURE.
Note: If Glide Slope signals are erratic, use LOC mode on the Autopilot only.
VOR/LOC (Front Course): Arm VOR/LOC and steer aircraft using HDG SEL and ALT HOLD as required. Monitor APD annunciator for appropriate Armed/Capture Indications.
Figure 6. Depiction of instrument landing system (ILS) pattern (image: First Air B737 Operations Manual, Volume 1, Amendment no. 23 [21 June 2011], page 03.80.3)
Volume 1 of the AOM provides graphical depictions for autopilot operation in various modes and phases of flight. There are graphics for operation in VOR/LOC mode for VOR navigation, and for ILS approach in AUTO APP mode, but there is no graphic depicting an ILS approach in VOR/LOC mode. Appendix R provides a TSB-produced graphical depiction of autopilot operation for an ILS approach in VOR/LOC mode. Appendix S provides a TSB-produced graphical depiction of flight director operation for an ILS approach in AUTO APP mode.
At 1615:24, before commencing the descent, the captain had advised the FO that he planned to use RNAV to navigate to the localizer and then switch from GPS to VHF NAV.Footnote 57 However, during the execution of the in-range checklist, the crew statements indicate that they selected VHF NAV in preparation for intercepting the ILS localizer for Runway 35T. There was no recorded discussion between the pilots regarding autopilot and flight director mode selections and changes, nor was this required at the time of the accident.
Other pilots were asked how they would conduct this transition from en route to final approach. The interviews revealed 2 methods for the transition.
The first method was as described in the AOM and depicted in Appendices R and S. Pilots using this method initially kept the GPS coupled to the autopilot in MAN mode. Then the pilots would switch to VHF NAV, select the autopilot mode to VOR/LOC, and maintain the intercept heading until the autopilot captured the localizer and turned inbound on final approach. The position at which pilots made the switch to VHF NAV varied from 1 to 10 miles back from MUSAT.
The second method was to keep the GPS coupled to the autopilot in MAN mode with the applicable area navigation (RNAV) approach loaded, and allow the GPS/autopilot to make the turn onto final approach. Once established inbound on final approach, the pilots would select VHF NAV and autopilot VOR/LOC mode, and then allow the autopilot to track the localizer inbound. Company management stated to investigators that this was not an acceptable method, and some pilots indicated that they discouraged use of this method. Pilot interviews revealed that using this method would sometimes result in initiation of the landing check before completion of the in-range check, because the in-range check was being held until the NAV switches could be changed from GPS to VHF.
While the company's B737 simulator training includes intercept procedures for coupled ILS approaches, the simulator is not equipped with GPS or FMS (flight management system). Therefore, training pilots were unlikely to identify that this non-standard practice was in common usage. Additionally, pilots interviewed reported that they would not use this method during training and pilot proficiency checks.
Pilots indicated that they would use the flight director AUTO APP mode, but preferred to avoid use of the autopilot AUTO APP mode, because the autopilot tended to overshoot the glideslope during capture. This overshoot would result in diminishing oscillations above and below the glideslope as the autopilot gradually acquired the centre of the beam. Their practice was to use the autopilot in VOR/LOC mode to track the localizer, and to use CWS pitch inputs to capture and maintain the glideslope.
1.17.2.7. Initial approach
The PF commands configuration changes, and the crew member making the selection monitors the indications and advises the PF when the aircraft is in the commanded configuration or if the system does not operate normally.
At 1637:25, the captain called for flaps 1. The FO indicated that the selection had been made, and at 1637:40, confirmed that flaps 1 were set and the leading-edge device green light was illuminated.
1.17.2.7.1. Landing checklist (initial)
Amplified checklist procedures are shown in Appendix U. The landing checklist is accomplished in 2 phases (initial and final). The landing (initial) scan/flow is initiated when flap 5 is selected (or turning base leg or established 15 miles final, whichever is the most appropriate). Action items are executed by the PNF and captain as follows:Footnote 58
PNF:
Status Change ··············································································································· 2 Chimes
Engine Start Switches ··············································································································· ON
Position the Engine Start Switches to ··········································································· LOW IGN
Press and release the annunciator panel. Verify no lights remain illuminated when the annunciator is released.
Captain:
Speedbrake ································································································ ARMED, GREEN LIGHT
At 1637:42, the captain called for flaps 5 and the landing checklist. The FO stated that flaps 5 had been selected and initiated the landing check. The initial landing scan/flow was conducted concurrently with the checklist. Two cabin chimes were recorded at 1637:53, and the first 3 items on the landing checklist were called out by the FO and verified by the captain. The FO stated that the checklist was complete to the gear and flaps at 1638:05. The FO did not verbally advise that the flaps were in the selected position.
As discussed in section 1.17.1.2, the AOM provides guidance for pausing a checklist at the direction of the captain. Specified phraseology for the captain is “Hold the checklist at (the item)” to initiate the pause, and “Continue the checklist” to reinitiate the checklist with the item at which it was held. The pause in the FAB6560 landing checklist was not initiated by the captain as specified in the AOM, and the standard phraseology was not used.
Pilot interviews revealed that the landing check was frequently held between the speedbrake item and the landing gear until the PF called for the gear, as directed in the phase-of-flight guidelines. However, there was no dashed line on the landing checklist; therefore, any pause in the checklist should have been initiated by the captain using the standard phraseology described above. Pilot interviews revealed that practices were closer to the dashed-line checklist-hold procedure (i.e., in-range checklist) than the ad hoc checklist pause procedure. This information is indicative of an adaptation that had become a norm.
1.17.2.7.2. Initial localizer and glideslope indications
The AOMFootnote 59 describes standard callouts to identify initial movement of localizer and glideslope cockpit indicators. At the first inward motion of the localizer indicator or first positive motion of the glideslope indicator, the PNF is required to call out “Localizer alive” and “Glideslope alive”, respectively. No response from the PF is required. The FO called localizer alive at 1638:20, and glideslope alive at 1638:25.
1.17.2.7.3. Landing checklist (final)
The AOM describes the landing (final) scan/flow, which is initiated when the landing gear is selected DOWN. Action items are executed by the PNF as follows:Footnote 60
Gear ··················································································································· DOWN, 3 GREEN
FLAPS ················································································································ 15, GREEN LIGHT
The captain called for gear down at 1638:38, and flaps 15 at 1638:42. The FO called gear down, 3 green at 1638:48. The FO called flaps 15, green light at 1638:55. The FO did not call the landing checklist complete, likely because final landing flap had not yet been selected.
1.17.2.8. Final approach
1.17.2.8.1. Initial deviation from localizer
The AOMFootnote 61 describes standard callouts and tolerances of various phases of flight. On approach, the PNF is required to call out “Localizer” whenever the localizer course deviation is in excess of 1 dot from the centre. The PF response is “Correcting.”
At 1639:13, the FO made a statement regarding aircraft lateral displacement from the desired track. He did not use the specified phrase indicated above. The captain acknowledged, but did not use the word “Correcting.” FDR data show that there were no control inputs made at this time. The aircraft was about 1½ dots right of the localizer centre at this time.Footnote 62
Between 1639:16 and 1639:30, the FO made 4 further statements regarding track displacement. The word localizer was not used in any of these statements. FDR and radar data show that, at 1639:23, the aircraft was 2 dots right of the localizer and 1½ dots above the glideslope.Footnote 63 At 1639:24.2, the FO stated, “Now we're through it.”
At 1639:33 and 1639:36, the captain made 2 statements that suggest that he was satisfied that the autopilot was tracking properly, but did not use the word “correcting” in either of his statements. Coincident with the second statement, a control wheel movement to the left occurred. The movement peaked at 10° wheel-left, and then changed direction to the right, through the neutral position to 6° wheel-right. These movements are consistent with manual control wheel steering (CWS) roll inputs by the PF.
Interviews revealed that First Air B737 pilots were aware of the standard callouts for localizer course deviation in excess of 1 dot from the centre.
1.17.2.8.2. Full deflection of localizer
General procedural guidance for instrument flying in CanadaFootnote 64 states that, during ILS approaches, a missed approach must be initiated if full-scale deflection of the localizer occurs at any time on final approach before decision height. This guidance is emphasized during basic instrument flying training. Neither the FOM nor the AOM specifies a callout for full deflection of the localizer.
At 1640:07, the FO made a statement phrased as a question about full localizer deflection. Over the next 26 seconds, the pilots discussed aircraft position relative to the localizer, but did not initiate a missed approach. At 1640:30, the FO suggested to the captain that they abandon the approach, but did not use the phrase “go-around” or “missed approach.” At 1640:33, the captain stated that he intended to continue the approach.
When asked whether a go-around was required with full-scale deflection of the localizer, all pilots interviewed stated that this condition required a go-around. However, all pilots interviewed agreed that an FO could not command a go-around, and could not see an FO taking control from the captain. They stated that the FO would likely make a suggestion or negotiate with the captain regarding the need for action.
1.17.2.8.3. Airspeed and final approach fix callouts
The AOMFootnote 65 specifies tolerances and a standard callout for airspeeds on approach before the final approach fix (FAF). The PNF is required to call out “Airspeed” if the airspeed is in excess of +10 or −5 knots of the minimum airspeed (VAPP), and the PF response is “Correcting.”
From the time when FAB6560 rolled out of the turn onto final (1639:05) until passing abeam the FAF (1640:20), the airspeed ranged between 168 and 173 knots indicated airspeed (KIAS); this airspeed was 30 knots greater than VAPP. At no time during this period did either pilot mention the airspeed.
The AOMFootnote 66 specifies a standard callout to be made by the PNF at the FAF inbound. The PNF is required to call out “Final approach fix, _____ feet (altitude), altimeter and instruments cross-check no flags.”
FAB6560 passed abeam the FAF (POKAN) at about 1640:20. The FO did not make any reference to the FAF or the required altimeter and instrument status at this or any other time.
Once inside the FAF, the PNF is required to call out “Bug ± ____ (speed difference)” if the airspeed is in excess of ±5 knots of the minimum airspeed (VAPP), and the PF response is “Correcting.”
From the time when FAB6560 passed abeam the FAF (1640:20) until impact, the airspeed ranged between 178 and 136 KIAS (VAPP +41 to −1 knots). At no time during this period did either pilot mention the airspeed.
1.17.2.8.4. Unstable approach
In 2012, there were 24.4 million departures for a worldwide fleet of civil-operated, commercial, western-built jet airplanes heavier than 60 000 pounds maximum gross weight.Footnote 67 An article in AeroSafety WorldFootnote 68 stated that, while only 3.5% to 4% of approaches are unstable, 97% of unstable approaches are continued to a landing, with only 3% resulting in a go-around.
Research has shown that unstable approaches present higher risk to safe flight operations.Footnote 69 Consequently, many air transport operators incorporate stabilized approach policies and procedures within their operations. This incorporation is intended to be an administrative defence against several negative outcomes, such as runway overruns and controlled flight into terrain (CFIT).
As this and other occurrencesFootnote 70,Footnote 71,Footnote 72,Footnote 73 show, some of these unstable approaches contribute to landing short of the runway, runway overruns, CFIT, and tail strikes. These outcomes will periodically result in catastrophic accidents with multiple fatalities.
The FOM section 8.13 describes the company's policy regarding stabilized approach criteria, and clearly states that a go-around is required in the event of an unstable approach. Section 8.13 reads as follows:Footnote 74
All approaches shall be stabilized by 1,000 feet AFEFootnote 75 in instrument meteorological conditions (IMC) and by 500 feet AFE in visual meteorological conditions (VMC).
An approach is considered stabilized when the following criteria are met and maintained:
The aircraft is on the correct flight path;
Only small changes in heading and pitch are required to maintain the correct flight path;
The airplane speed is not more than VREF + 20 knots indicated airspeed and not less than VREF;
The airplane is in the correct landing configuration;
Sink rate is no greater than 1,000 fpm;Footnote 76 if an approach requires a sink rate greater than 1,000 fpm, a special briefing shall be conducted. Steep Slope Approach go-around criteria will be specifically defined in the aircraft Standard Operating Procedures;
Thrust setting must be above flight idle and appropriate for the airplane configuration;
ILS approaches shall be flown within one dot of the glide slope and localizer, or within the expanded localizer scale;
During a circling approach, wings should be level on final when the aircraft reaches 300 feet above airport elevation; and
All briefings and checklists have been conducted.
Unique approach procedures or abnormal conditions requiring a deviation from the above elements of a stabilized approach require a special briefing.
An approach that becomes unstable below 1,000 feet AFE in IMC or below 500 feet AFE in VMC requires an immediate go-around.
At 100 feet HATFootnote 77 for all visual approaches, the airplane must be positioned so the flight deck is within, and tracking to remain within, the lateral confines of the runway edges extended.
As the airplane crosses the runway threshold it shall be:
Stabilized on target airspeed to within +10 knots until arresting descent rate at flare;
On a stabilized flight path using normal maneuvering; and
Positioned to make a normal landing in the touchdown zone.
Initiate a go-around if any of the preceding criteria cannot be met.
The company was aware that its stabilized approach policy had not yet been implemented with procedures specific to aircraft type. On 19 May 2010, the company standards committee proposed standard calls to be used to implement the policy. However, at the time of the accident, the AOM did not include standard calls for an unstable approach.
The AOM Volume 1, page 03.60.31, discusses landing procedures as follows:Footnote 78
For a normal approach, the landing configuration (gear down and landing flaps) is established early on final approach. Selection of landing flap must be made prior to 1000′ AGL. Stabilize aircraft on speed and profile with airplane in trim by 1000′ AGL.
At 1640:41, the FO stated, “We're 3 mile final; we're not configged.” At this time, the aircraft was about 900 feet above the touchdown zone elevation (Appendix C), and the following parameters exceeded the stable approach criteria:
In excess of 2 dots deviation from localizer;
Significant changes in heading and pitch required to correct to proper flight path;
Airspeed of 176 KIAS, VREF + 44 knots;
Aircraft not configured for landing;
Landing checklist not complete.
At 1640:45, the captain responded with the first of several instructions to the FO to make the remaining flap selections for landing. Intermixed with the flap configuration calls were several further exchanges between the pilots regarding aircraft position. No go-around was initiated, and the approach was continued.
The AOM Volume 1, page 03.20.1,Footnote 79 states that final landing gear and flap position shall always be confirmed by the captain. This requirement is embodied in the landing checklist described in Appendix U, wherein both the PF and PNF must respond to the final gear and flap challenges. At 1641:08, the captain called for flaps 40. The FO's response confirmed that the gear was down, but did not mention the flap position. The FO did not make either of the final landing checklist gear or flap challenges, and the captain's response related only to the flap 40 position and did not include confirmation of the gear. The FO did not call the landing checklist complete.
All pilots interviewed were aware of the company's stable approach policy and that a go-around was required if unstable below 1000 feet, but not all could state the criteria. Some pilots were unsure whether a SOP describing action to take in the event of an unstable approach existed. When asked how, as PNF, they would initiate a go-around when unstable below 1000 feet, pilot responses varied: some pilots took up to 90 seconds to respond; others reported that they would call out, “Unstable approach, go-around”, and one pilot indicated that, as a last resort, he would take control and fly the go-around himself.
1.17.2.8.5. Standard aircraft state callouts inside the final approach fix
The AOM Volume 1, page 03.32.4, specifies standard callouts to be used by the pilots once inside the FAF (Table 9).
Table 9. Standard aircraft state callouts and tolerances inside the final approach fixFootnote 80
TOLERANCES/SITUATION
PNF CALLOUT
PF/PNF RESPONSE
GLIDESLOPE IN EXCESS OF 1 DOT
“GLIDESLOPE”
“CORRECTING”
RATE OF DESCENT IN EXCESS OF 1200 FPM
“SINK RATE”
“CORRECTING”
PITCH ANGLE APPROACHING ± 5° OF STABILIZED PITCH ATTITUDE
“PITCH”
CAUTION: BE ALERT TO
WINDSHEAR INDICATIONS
“CORRECTING”
THRUST LESS THAN 1.1 EPR AT ALTITUDE LESS THAN 1000′ AGL
“THRUST”
“CORRECTING”
NOTE: When specific circumstances require aircraft operation outside of the above tolerances, the PF should advise the PNF of his or her intentions and the specific reason for doing so.
From 1640:50 to impact, the aircraft was in excess of 1 dot above the glideslope. During this period, the glideslope was mentioned only once, at 1641:26, when the captain commented on the presence of the glideslope indicator. At 1641:28, the FO responded that it was fully deflected. The specified “Glideslope” and “Correcting” callouts were not used.
TC provides general procedural guidance for instrument flying. Guidance for ILS approaches states that “[i]f the aircraft is inbound on the localizer above the glide path the pilot must use extreme caution,” because of an excessive rate of descent needed to regain the glide path.Footnote 81
The rate of descent was relatively stable at about 700 feet per minute (fpm) from 1640:20 until 1640:48. At this time, the rate of descent decreased, stabilizing at about 200 fpm until 1641:16. At this time, the rate of descent increased, exceeding 1200 fpm from 1641:42 until 1641:48. From this time until impact at 1641:51.8, the rate of descent decreased. At no point during the period when the rate of descent exceeded 1200 fpm did either pilot mention it.
At 1641:18, the pitch angle began decreasing from +2°, reaching −4.8° at 1641:42. Neither pilot commented on this pitch change.
At 1640:49, the aircraft was below 1000 feet agl, and thrust on both engines had been reduced below 1.1 engine pressure ratio (EPR). The left engine thrust increased above 1.1 EPR at 1640:59, and the right engine thrust did so at 1641:06. Neither pilot commented on the low thrust setting.
The AOM Volume 1, page 03.32.1,Footnote 82 specifies standard phraseology to be used by the PNF to indicate proximity to decision height on an ILS approach. At 100 feet above decision height, the PNF is required to call out “100 feet to minimums.” FAB6560 reached 100 feet above decision height at 1641:48. The FO did not make any statement regarding height above decision height.
1.17.2.9. Go-around
1.17.2.9.1. Standard Callouts and Go-around Procedure
The AOM Volume 1, page 03.32.1,Footnote 83 specifies that the PNF is required to make a callout at decision height on an ILS approach identifying that the aircraft has reached the minimum altitude and describing whether the runway is in sight. The standard callouts are “Minimums, runway in sight” or “Minimums, no contact.” The standard response by the PF is “Landing” or, if no visual contact is established, “Go-around thrust, flap ____.”Footnote 84
This standard callout by the PNF provides information to the PF regarding aircraft position and visual reference status. Following the PNF callout, the PF then makes a decision whether to continue the approach or initiate a go-around.
The AOM Volume 1 describes the go-around procedure for aircraft equipped with the SP77 autopiloton page 03.60.35, as reproduced in Figure 7.
Figure 7. First Air B737 go-around procedure [reproduced from: First Air B737 Operations Manual, Volume 1, Amendment no. 23 (21 June 2011), GO-AROUND PROCEDURE (SP77), page 03.60.35]
The procedure in Figure 7 specifies a callout by the PF to initiate the go-around. This callout, “Go-around, flaps 15”, differs from the standard callout specified on page 03.32.1.
Neither of these portions of the AOM provide for the PNF to make a go-around call.
1.17.2.9.2. No-fault go-around policy
Section 8.12 of the FOM describes the company's policy guidance regarding “no-fault” go-around (below).Footnote 85 The policy was implemented before 2008.
In order to enhance safety and to reduce the risk of approach and landing accidents, First Air maintains a “No Fault” go-around policy.
In addition to the requirement to perform a go-around, in the event that an approach is not stabilized, a pilot may conduct a go-around for any reason (i.e. lack of adequate visual references, weather conditions not suitable, conflicting traffic, and loss of contact with ATC) without fear of disciplinary action from the Company.
1.17.2.9.3. First Air ground proximity warning system policy
Section 2.22.5 of the FOMFootnote 86 states, “Specific procedures to be followed in the event of an instrument flight rules (IFR) in-flight activation of GPWS/TAWSFootnote 87 are contained in the applicable AOM.”
The AOM Volume 1, page 04.200.31, specifies a procedure to be used for terrain avoidance. The procedure specifies that activation of the “pull up” warning or other situations resulting in unacceptable flight toward terrain are regarded as presenting a potential for terrain contact. The description of the terrain avoidance procedure is reproduced in Figure 8.
Figure 8. Terrain avoidance procedure (reproduced from: First Air B737 Operations Manual, Volume 1, Amendment no. 23 [21 June 2011], page 04.200.31)
1.17.2.9.4. FAB6560 ground proximity warning system alerts and go-around initiation
The FAB6560 crew did not initiate a go-around at either the point of full localizer deflection or at 3 miles when the FO indicated that they were not configured (in an unstable approach). At 1641:47.7, the GPWS provided an aural “sink rate” alert. At 1641:49.0, the FO stated, “Go for it.”
At 1641:49.2, the GPWS started to issue an aural “minimums…minimums” alert. Between the 2 “minimums” (1641:50.1), the FO stated, “Go around.” At 1641:51.2, the captain stated, “Go-around thrust.” The captain did not mention flap selection in his go-around statement. At 1641:51.8, FAB6560 collided with terrain.
1.17.3. First Air safety management system safety oversight processes
1.17.3.1. Line reports
Section 9.6 of the FOM describes line reports. The line report is sent to the pilot-in-command (PIC) at the start of each duty period, along with the OFP. The line report is the primary method of providing feedback from flight operations so as to outline problems. The line report must be completed after each flight. The contents of the line report are read by flight operations administration and the chief pilot. Any problems specified are followed up regardless of the department involved. Upon completion of any duty period, the PIC is responsible for faxing the completed line report to flight dispatch as soon as possible.
Among other items to be included on the line report is a thorough description of any non-normal operational events.
1.17.3.2. Air safety reports
Section 9.7 of the FOM discusses air safety reports. An air safety report must be completed when any of the requirements on the back of the form are met. The PIC is responsible for forwarding air safety reports to dispatch via the most expeditious means possible.
1.17.3.3. Unreported incidents
1.17.3.3.1. General
The investigation revealed 2 previous incidents involving CYZF-based First Air B737 crews that had similarities to this occurrence. See below for further details about the 2 incidents. Neither of these incidents was reported to the company, and company managers were unaware that the incidents had occurred. The investigation examined the First Air safety management system (SMS) processes for internal reporting of hazards, incidents, and accidents to determine whether the data collected were being tracked and used to advance safety of the operation.
1.17.3.3.2. Incident one
In the weeks before the CYRB accident, a First Air B737 flight crew experienced problems with navigational instruments while conducting an approach in instrument meteorological conditions (IMC) at another airport in Nunavut. While these events occurred on a different aircraft than the one involved in the CYRB accident, the captain of FAB6560 was also the captain involved in this incident.
The flight crew planned an RNAV approach to the airport. At the time, it was windy and raining, and the sky was overcast at approximately 600 feet agl. The captain was the PF. Because the airport is within the NDA, flight operations must be conducted with reference to true north. Before descent, the crew switched the compasses from magnetic to DG in preparation for the approach.
Magnetic variation at the airport was 32° east. While the compasses were switched to DG, it could not be confirmed whether the compasses were set to the true heading. The heading was not readjusted at 10 000 feet.
During the final phase of the approach, the autopilot was coupled to the FMS and was following the final approach track. The horizontal situation indicator (HSI) course pointer, which had been set for the final approach track, was not properly lined up with the direction of flight. While established on final, the heading was approximately 30° off the runway heading, resulting in the course pointer pointing approximately 30° to the left. As the aircraft descended below the cloud layer, a turn was initiated to line up with the course pointer. At that time, with the aircraft approximately 1.5 nm from the runway threshold, visual reference with the runway was acquired, and the turn was stopped.
The approach was continued, and an uneventful landing followed. This event was not reported to the company via a captain's line report, an air safety report, or a hazard occurrence investigation report.
1.17.3.3.3. Incident two
Earlier in the summer of 2011, during a charter flight in Nunavut, another First Air B737 crew also experienced problems with navigational instruments while conducting an approach in IMC. These events occurred on C-GNWN, although neither pilot from FAB6560 was involved.
On arrival at destination, there was a cloud layer based at approximately 200−300 feet agl, requiring the crew to conduct an IFR approach. Because the airport is located in the Southern Domestic Airspace, flight operations must be conducted with reference to magnetic north. At some point before arrival, the compasses were switched from DG to magnetic.
The flight received air traffic control (ATC) radar vectors for an ILS/DME approach. The aircraft was being flown using the autopilot. However, the aircraft flew through the localizer, and the autopilot did not capture the localizer. The crew manually flew the aircraft back to the localizer, but became concerned when navigational instrument indications did not seem to make sense. While the aircraft was established on the localizer, the bearing to the NDB seemed to be off by 10° to 15°, giving the appearance that the flight was experiencing a strong crosswind.
Other than the autopilot not capturing the localizer, the crew did not notice any indication of malfunctions, such as comparator lights. However, at approximately 3 miles from the runway threshold, a missed approach was conducted due to the navigational instrument indications. Once at a safe altitude, the crew checked the compasses and determined that they were slightly off. They thought that this discrepancy might have played a role in the failure of the autopilot to intercept the localizer. The crew realigned the compasses using a GPS bearing to an NDB, and also confirmed that the navigational receivers were set up properly.
The crew then flew a second ILS/DME approach and landed without further incident. Although the crew thought that the compasses were a little slow in synchronizing after selection of magnetic mode, they were not deemed by the crew to be unserviceable. Therefore, the crew did not record a defect for the compasses in the journey log. Additionally, although a go-around is a mandatory reportable occurrence, no mention of the incident was made on the captain's line report for the day, and no air safety report or hazard occurrence investigation report was submitted. A search of the TC CADORS (Civil Aviation Daily Occurrence Reporting System) could not identify the occurrence.
However, the incident flight was discussed with the captain of FAB6560. Incident Two was mentioned by the FAB6560 captain shortly before impact.
1.17.3.3.4. First Air safety management system implementation and operation
First Air operates under Subpart 705Footnote 88 of the CAR, and was required to have an SMS since 31 May 2005, when the applicable regulationFootnote 89 came into force. Implementation of an SMS takes an extended period. Like all Subpart 705 operators, First Air operated under a regulatory exemption permitting a 4-phase implementation of the SMS extending over 3 years.
On completion of phase 4 of SMS implementation at First Air, TC conducted an assessment of the SMS in September 2009. The objective of this assessment was to verify that the organization had effectively implemented its SMS. The scope of the assessment included all SMS processes and associated activities conducted under the authority of the company's air operator certificate and air maintenance organization certificate. The assessment covered the period from January 2008 to September 2009.
Table 10 outlines the 6 components of the SMS framework and their corresponding elements.
Table 10. Components and elements of a safety management system framework (based on Transport Canada [TC] safety management system modules)
Component
Element
1. Safety management plan
1.1 Safety policy
1.2 Non-punitive safety reporting policy
1.3 Roles, responsibilities, and employee involvement
1.4 Communication
1.5 Safety planning, objectives, and goals
1.6 Performance measurement
1.7 Management review
2. Documentation
2.1 Identification and maintenance of applicable regulations
2.2 SMS documentation
2.3 Records management
3. Safety oversight
3.1 Reactive processes
3.2 Proactive processes
3.3 Investigation and analysis
3.4 Risk management
4. Training
4.1 Training, awareness, and competence
5. Quality assurance
5.1 Quality assurance
6. Emergency preparedness
6.1 Emergency preparedness and response
A non-punitive safety reporting policy (element 1.2) is an integral portion of an SMS. The assessment determined that the First Air policy met the minimum regulatory requirements, and observed that employees interviewed throughout the organization understood the non-punitive measures and were comfortable with the policies. Many employees stated that the reporting policy was stated in company procedures and is completely engrained in daily operations.
In its assessment report dated 05 October 2009,Footnote 90 TC stated that, during the earlier phases of SMS implementation, the company struggled somewhat with designing a management system that was appropriate to its organization. The report concluded that the company met the principles of a safety management system wherein all employees are empowered to actively participate in the proactive safety performance of the company.
The First Air SMS is documented in section 13 of the company's Corporate Quality Assurance Manual, which describes its quality management system, based on the following principles:
Customer focus;
Leadership;
Employee participation;
System approach to management;
Process oriented;
Data-driven decision making; and
Continuous improvement.
1.17.3.4. Incident and hazard reporting process
To improve safety, First Air employees are required to report all incidents and hazards.Footnote 91 The company acts on safety reports with a focus on improvements and implementation of corrective action rather than punitive action.
The company has 4 full-time employees assigned to the Safety Management Department. Additionally, when required, a technical investigator is tasked with conducting investigations to provide the information required to initiate safety actions.
Hazard information can be submitted to the company in many different forms, such as by:
Air safety report,
Hazard occurrence investigation report, or
Email.
The back of the company's air safety report form lists all reportable occurrences, separated into 2 sections. The first section lists occurrences that must be reported to the TSB. The second section lists all occurrences that must be reported to First Air by employees. It is noteworthy that a go-around is listed as a mandatory company-reportable occurrence in the second section. Additionally, the last bullet of the list of mandatory reportable occurrences is as follows: “Any other event where safety standards are significantly reduced, or any event which may provide useful information for the enhancement of flight safety.”
All safety reports are recorded in an aviation quality database system, which was purchased and installed in mid-2011. Consequently, the new database does not contain all data collected since the beginning of the SMS at First Air.
Once a safety report is received, an assessment is completed, and a decision is made as to whether an investigation should take place. The person who has submitted the report is advised of the decision.
1.17.4. First Air methods of monitoring flight operations
First Air employs several methods to monitor flight crew performance and adherence to company policies and procedures, including:
Initial technical ground training, which provides an opportunity to indoctrinate pilots with the company's operating philosophy, policies (flight operations manual [FOM]), and procedures (aircraft operations manual [AOM]);
Initial simulator training, by which pilots receive training that reinforces the company's operating philosophy, policies, and procedures;
Pilot proficiency checks, which are performance checks conducted in a simulator to verify that pilots have met the required standard and to validate the training process;
Line indoctrination, which is conducted by training pilots to expose pilots to the company's operational environment and to further reinforce the company's operating philosophy, policies, and procedures;
Line checks, which are conducted at the completion of line indoctrination to verify that pilots' performance meets the required standard;
Recurrent training, which involves annual ground and simulator recurrent training that provides opportunities to reinforce the company's operating philosophy, policies, and procedures;
Recurrent pilot proficiency checks and line checks, which provide another opportunity annually for the company to verify that pilots meet the required standard and to verify compliance with company policies and procedures;
Line reports (section 1.17.3.1), which provide company management with a limited opportunity to monitor flight operations as reported by captains; and
Management flying, which involves company flight operations managers flying periodically with line pilots, and provides managers with an opportunity to directly observe pilot performance.
1.17.5. Other methods of monitoring flight operations
1.17.5.1. Flight data monitoring
Fight data monitoring (FDM) is a program to improve flight safety by providing more information about, and greater insight into, the total flight operations environment through selective automated recording and analysis of objective data generated during flight operations. FDM is also known as flight operational quality assurance (FOQA) or flight data analysis.
An FDM program is intended to enable an operator to identify, quantify, assess, and address operational risks through discreet and anonymous collection of electronic flight data from routine operations. Proactive and non-punitive analysis of this de-identified data is used to improve aviation safety through development and upgrade of training programs, policy, and procedures to address the identified risk areas and measure the results of these initiatives.
FDM has been implemented in many countries, and it is widely recognized as a cost-effective tool for improving safety. In the US and Europe―thanks to ICAO―many carriers have had the program for years. Some helicopter operators have it already, and the FAA has recommended it.
In Canada, carriers are not required to have an FDM program. Even so, many operators routinely download their flight data to conduct FDM of normal operations. Air carriers with FDM programs have used flight data to identify problems such as unstabilized approaches and rushed approaches; exceedance of flap limit speeds; excessive bank angles after take-off; engine over-temperature events; exceedance of recommended speed thresholds; GPWS/TAWS; onset of stall conditions; excessive rates of rotation; glide path excursions; and vertical acceleration.Footnote 92
Following TSB aviation investigation A11W0048, the Board recommended that the Department of Transport work with industry to remove obstacles to and develop recommended practices for the implementation of flight data monitoring (Recommendation A13-01).Footnote 93
First Air has an FDM program which commenced operations in 2010. However, the company experienced problems with data quality and with obtaining reports from the contracted service provider, and terminated its contract in 2011. At the time of the accident, the company's FDM program was undergoing a transition to a new service provider, and data analysis was not being conducted. During the transition, data downloads continued with the intent of having the data available for use when the new system was in place.
1.17.5.2. Line operations safety audit
A line operations safety audit (LOSA) is a method for air operators to better understand risks present within their flight operations. LOSA is:Footnote 94
… a critical organizational strategy aimed at developing countermeasures to operational errors. The objective of this monitoring programme, built around Threat and Error Management (TEM) framework, is to identify threats to aviation safety, minimize the risks such threats may generate and implement measures to manage human error in operational contexts. LOSA enables operators to assess their level of resilience to systemic threats, operational risks and front-line personnel errors, thus providing a principled, data-driven approach to prioritise and implement actions to enhance safety.
LOSA uses highly trained observers to collect data about flight crew behaviour and situational factors on “normal” flights. By monitoring the flight from the cockpit, the observer can learn much about flight crew behaviour and crews' strategies for managing threats, errors and undesirable states.
LOSA is closely linked with Crew Resource Management (CRM) training. A particular strength of LOSA is that it identifies examples of superior performance that can be reinforced and used as models for training.
LOSA is a voluntary program, and First Air has not participated in LOSA.
1.17.6. Air traffic services
1.17.6.1. Canadian airspace
The Canadian Domestic Airspace is divided into low-level airspace, consisting of all airspace below 18 000 feet above sea level (asl), and high-level airspace, consisting of all airspace from 18 000 feet asl and above. Controlled airspace within the high-level airspace is divided into 3 separate areas: the Southern Control Area, the Northern Control Area and the Arctic Control Area. The lateral and vertical dimensions are illustrated in Figure 9 and Figure 10. The Canadian Domestic Airspace is also geographically divided into the Southern and the Northern Domestic Airspace (NDA). The lateral boundaries of the NDA encompass both the Northern and Arctic Control Areas depicted in Figure 9. CAR 602.34(1)(b) requires that cruising altitudes be determined based on true track in the NDA. Additionally, tracks depicted on IFR flight information publications are relative to true north.
Figure 9. High-level airspace lateral boundaries (image: Transport Canada (TC), TP 14371 − Transport Canada Aeronautical Information Manual [TC AIM], RAC– Rules of the Air and Air Traffic Services [17 October 2013], section 2.6, Figure 2.3)
CAR 602.32(1)(a) specifies that no person shall operate an aircraft at a speed greater than 250 KIAS below 10 000 feet asl. At 1632:35, FAB6560 descended through 10 000 feet at 310 KIAS, and gradually decelerated during the descent, reaching 250 KIAS as it descended through 5430 feet asl. Pilot interviews revealed that the 250-KIAS airspeed limit below 10 000 feet was occasionally exceeded to adjust the descent profile.
Figure 10. High-level airspace vertical boundaries (source: Transport Canada, TP 14371 − Transport Canada Aeronautical Information Manual [TC AIM], RAC − Rules of the Air and Air Traffic Services [17 October 2013], section 2.6, Figure 2.4)
FAB6560 departed CYZF, situated in the Southern Control Area, proceeded on course through the Northern Control Area, and eventually flew into the Arctic Control Area as it approached CYRB. During the climb and cruise phase (FL310) of flight, the aircraft was in controlled airspace at all times. Upon descent into CYRB, the aircraft entered uncontrolled airspace as it descended below FL270. Under normal circumstances, the NAV CANADA Edmonton Area Control Centre (ACC) would clear the aircraft out of controlled airspace at this time. The crew would then continue descent and contact the CYRB Community Aerodrome Radio Station (CARS)Footnote 95 on the mandatory frequency (MF) when approaching the airport. For CYRB, this must be done before being within 25 nm of the airport and at or below 5300 feet asl.Footnote 96 The CARS observer/communicator does not provide traffic separation services. Within the MF area of an uncontrolled aerodrome, pilots must communicate with other pilots on the MF to ensure that there is no traffic conflict.
The pilot of an aircraft operating under IFR procedures who intends to conduct an approach and landing at an uncontrolled aerodrome must broadcast the intentions of the pilot-in-command on the MF regarding the operation of the aircraft. The estimated landing time must be communicated 5 minutes before commencing the approach procedure. Additionally, position reports are required at the following points:
when passing the fix outbound, when the pilot-in-command intends to conduct a procedure turn, or, if no procedure turn is intended, when the aircraft first intercepts the final approach course;
when passing the final approach fix, or 3 minutes before the estimated landing time where no final approach fix exists; and
on final approach.
1.17.6.3. NOTAM format
NOTAMs (notices to airmen) are devices meant to transmit aeronautical information to users. NAV CANADA is the agency that publishes NOTAMs, and is responsible only for ensuring that the appropriate procedures were followed in respect of the information being transmitted. The originator of the information is responsible for the accuracy of the information being supplied for publication. In this case, the military was the NOTAM content originator.
A new NOTAM is indicated by the letter N following the word NOTAM in the line that indicates the NOTAM number, and the affected area. The first NOTAM issued concerning the military terminal control area (MTCA) on 02 August contained the line “111404 NOTAMN CZEG Edmonton FIR”. The last line of the NOTAM indicated the period during which the NOTAM would be effective: “1108061300 TIL 1108280100”.Footnote 97
The first revision to the NOTAM was designated as follows: “111424 NOTAMR 111404 CZEG Edmonton FIR”. On this NOTAM, the last line read “1108101300 TIL 1108280100”. Here, the letter R following the word NOTAM indicates a replacement of a previous NOTAM, but does not highlight which of the many pieces of information has been revised. Subsequent replacements are indicated by the same letter R followed by the number of the previous NOTAM that is being replaced. There is no other indication of what has been changed.
The letter C following the word NOTAM indicates a cancellation of a NOTAM.
During the occurrence, none of the pilots inbound to CYRB were aware that the MTCA was not in effect. As well, the NAV CANADA Edmonton ACC controller who handled FAB6560 thought that the MTCA was in effect because the controller advised FAB6560 that they would re-enter controlled airspace at FL200 and instructed them to contact the MTCA terminal frequency.
NOTAMs listed on the NAV CANADA aviation weather Web site (AWWS) do not contain the N or R designation to assist crews in determining whether NOTAMs listed there are new ones or replacements. The investigation determined that several flights interpreted the NOTAM information to mean that the MTCA would be in effect.
The NOTAM generation system has background coding associated with the R, C, or N that triggers automated activity regarding how a NOTAM will be handled by the computer software. Crews that receive their NOTAMs through this distribution source will see the codes and realize that something has changed, but must scan through to see what has changed. This change can be difficult to determine if a single digit in the effective date line is all that changes. The AWWS does not have a need for these codes, and therefore the letters are not used. Each NOTAM on AWWS must therefore be treated by aircrew as if it is a new NOTAM.
1.17.6.4. Resolute Bay military air traffic control
The military agency responsible for providing the ATC equipment and for the ATC operation in CYRB for Operation NANOOK is 8 Air Control and Communications Squadron (8ACCS), based in Trenton, Ontario. The unit is experienced in deployed operations and routinely sets up precision approach radar (PAR) units in support of Operation BOXTOP, the resupply of the far northern Alert research station. As well, each year the unit sets up a complete airfield operation on the military base in Wainwright, Alberta. The operation in CYRB was to be the first such complete airfield operation in a civil environment.
8ACCS has no dedicated controller resources other than PAR controllers. To fulfill the need for tower and terminal controllers, 8ACCS provides its needs to 1 Canadian Air Division in Winnipeg, which then canvasses Canadian Forces bases for nominees. Controllers are selected and sent to 8ACCS in Trenton before the deployment for familiarization, and to be briefed and tested on the operation and local procedures that they will face at the site. Controllers are expected to maintain full knowledge of the contents of NAV CANADA ATC MANOPS and the CF ATC Sup.
As previously noted, the military radar installed for Operation NANOOK had not been flight-checked and could not be used; therefore, the establishment of the MTCA was repeatedly delayed. Because the establishment of the MTCA was delayed, the airspace below FL270 remained uncontrolled and there was no capability or necessity to provide any sort of IFR separation within the airspace intended for the MTCA.
NAV CANADA ATC MANOPS permits the application of IFR separation services to aircraft in airspace that is not served by radar.Footnote 98 An example of how this application can be achieved is by keeping subsequent arriving aircraft outside the zone or at a higher altitude until the aircraft on approach has landed. While the Class D control zone was in effect, there were no procedures in place to direct controllers to apply non-radar IFR separation standards within the Class D control zone, even though such services are required. IFR separation standards were not established between FAB6560 and KBA909 on entry to the control zone.
Current CYRB weather information was available to the tower and terminal controllers through the use of dedicated computer terminals used to monitor the NAV CANADA aviation weather Web site. There was no automated terminal information system (ATIS) service set up in the CYRB ATC unit.
Landing information that must be provided by terminal controllers to arriving aircraft is listed in NAV CANADA ATC MANOPS as follows:Footnote 99
461.2
Include the following items, as appropriate, in landing information:
Wind.
Visibility.
Ceiling.
Altimeter setting.
Pertinent remarks from the current weather report.
Conventional or RNAV STAR, including any transition.
Runway in use.
Approach aid in use.
Pertinent airport conditions.
461.4
Except during rapidly changing conditions, you need not issue information included in the current ATIS (Automated Terminal Information System) broadcast, provided the aircraft acknowledges receipt of the broadcast.
At 1629, during initial contact between the CYRB terminal controller and FAB6560, only item D and traffic information was provided.
Article 342.1 of ATC MANOPS applies to airport operations and visual flight rules (VFR) control. It specifies that tower controllers shall issue an initial clearance in the following form:Footnote 100
(Aircraft identification);
(Unit identification if required);
RUNWAY (number);
WIND (direction and speed);
ALTIMETER (setting);
CLEARED TO THE CIRCUIT (other specific point);
radar identification (if required);
(request for position reports as required); and
(other information, such as traffic, simultaneous crossing runway operations or airport conditions).
The CYRB tower controller provided the required information except for item F, which was not applicable because instrument meteorological conditions prevailed, and item G, which was not applicable because radar was not in operational use.
1.17.6.5. Temporary airspace for Operation NANOOK
Initial planning for Operation NANOOK among the military, TC, and NAV CANADA revolved around the dimensions and type of airspace required by the military and the means of alerting the aviation community about the operation. The airspace was established by TC by means of amendments to the Designated Airspace Handbook, in accordance with military needs. Class D airspace was chosen in order that the control agency might be able to provide positive control service to operators during the period of Operation NANOOK.
A control zone is designated to ensure that IFR aircraft can remain within controlled airspace during approaches and to facilitate the control of VFR and IFR traffic. Control area extensions are designated around aerodromes where the control zone provided is insufficient to permit the required separation between IFR arrivals and departures, and to contain IFR aircraft within controlled airspace. A terminal control area (TCA) is similar to a control area extension, except that a TCA may extend up into the high-level airspace.Footnote 101
An ATC clearance must be obtained before entering controlled airspace for flight under IFR. Class D airspace is controlled airspace within which both IFR and VFR flights are permitted. ATC separation is provided only to IFR aircraft. Aircraft will be provided with traffic information.
The means of alerting the aviation community was accomplished by NOTAMs issued by NAV CANADA on 02 August 2011. NOTAMN 111404 established a Class D Military Terminal Control Area, or MTCA, within an 80 nm radius of CYRB, from 700 feet agl to FL200, effective 06−28 August 2011 (Appendix W). NOTAMN 111405 established a Class D control zone (CZ) within a 10 nm radius of CYRB from the surface to 6000 feet asl, effective 06−28 August 2011.
1.17.6.6. Temporary radar facilities
Radar provides a positive method of identifying aircraft traffic and ensuring separation. Temporary radar facilities were planned to be set up in CYRB as part of the military's Class D airspace operation. This plan included both area surveillance radar (ASR) and PAR.
The delivery of the air traffic control equipment was delayed, and implementation of both the CZ and MTCA was correspondingly delayed. The delays were promulgated by NOTAMR 111424 and NOTAMR 111425, issued 04 August 2011, which replaced the previous NOTAMs and delayed the effective dates of both the MTCA and the CZ until 10 August 2011. The NOTAMs are shown in Appendix W.
After arrival and setup of equipment, NOTAMN 110102 was issued on 12 August, establishing the Class D control zone effective 10 August 2011 until 28 August 2011 (Appendix W).Footnote 102
Poor weather prevented the performance of flight checks of the CYRB radar, and implementation of the MTCA was delayed. A series of NOTAMs, as follows, were issued over the following days to delay the establishment of the MTCA:
A NOTAM issued on 12 August delayed the establishment of the MTCA until 14 August.
A NOTAM issued on 14 August delayed the establishment of the MTCA until 15 August.
A NOTAM issued on 15 August delayed the establishment of the MTCA until 16 August.
A NOTAM issued on 17 August delayed the establishment of the MTCA until 19 August.
A NOTAM issued on 19 August delayed the establishment of the MTCA until 21 August.
All of the delays had been made in anticipation that the military radar would then be flight-checked by the revised date; however, there was no assurance that a flight check would be scheduled in order to meet the new date and time. Because neither the ASR nor the PAR had been flight-checked, they were not available for use in providing control services.Footnote 103
Portable trailers at CYRB housed both the tower and terminal controller work stations (Photo 6). Both work stations were equipped with communication equipment and multiple information display monitors. One monitor in the tower provided radar information. The terminal control work station was equipped with several displays for ASR and PAR.
Photo 5. Temporary military air traffic services (ATS) facility at Resolute Bay (CYRB). The terminal trailer is located behind the tents.
Although the radar had not been flight-checked, it was operating. Radar data were being recorded and fed to both trailers. The terminal controller was at the control work station monitoring the arrival of air traffic and issuing departure clearances to departing flights. Radar information was displayed, but was not being used for control purposes.
When FAB6560 was approximately 10 nm from CYRB turning onto final approach, the terminal controller spoke briefly with the tower controller, and was advised that the tower radar display was inoperative. The technician in the terminal trailer was not available. The MTCA was not in effect, and the terminal controller was not providing control services. The terminal controller had had an issue previously in the day with the terminal radar display, which was rectified with a simple reset of the display. The terminal controller offered to assist by resetting the tower radar display, and left the terminal trailer and went to the tower trailer. The terminal controller was unable to reset the tower radar display and returned to the terminal trailer.
On returning to the terminal trailer, the terminal controller momentarily glanced at the radar displays, but did not pay them much attention, because the radar could not be used for control purposes.
The tower controller did not have a functioning radar display for situational awareness, and the weather prevented visual acquisition of air traffic.
1.17.6.7. Instrument approach procedures: military terminal control area in effect
Had the military surveillance radar been operational and the MTCA been in effect, aircraft entering the airspace would contact the CYRB terminal controller on the designated frequency and receive instructions regarding the descent and approach into CYRB. Radar would have been used to identify aircraft and maintain separation. The crew of an aircraft would indicate approach and landing intentions to the terminal controller, and would receive instructions regarding heading and altitudes to maintain/follow and course deviations observable to the terminal controller.
As the aircraft approached the airport, the terminal controller would issue a clearance to conduct an instrument approach. The aircraft would remain on the terminal frequency under terminal control until short final for the runway. On short final approach, the aircraft would be transferred to the tower frequency to get a landing clearance. The crew would continue with the instrument approach using the aircraft's navigational equipment until acquiring visual references for landing.
1.17.6.8. Instrument approach procedures: military terminal control area not in effect
Without the MTCA being operational, IFR aircraft approaching CYRB from high-level uncontrolled airspace (below FL270) would have to establish communication with the military control tower before entering the zone. Aircraft would give their estimated time of arrival (ETA), indicate approach intentions, and remain on tower frequency to receive traffic information and clearance to enter the zone. Whenever an ETA is passed, the pilot should specify the point, fix, or facility to which the ETA applies. The crew would then conduct an instrument approach, and upon receipt of a landing clearance from the tower, would land or initiate a missed approach if not in a position to land.
Once inside the Class D control zone, IFR separation standards were applicable. To prevent traffic conflicts, IFR aircraft needed to be provided with IFR control services (i.e., separation and approach clearances) by an IFR-certified controller, regardless of whether radar is available.
1.17.7. Crew resource management
1.17.7.1. Objective of crew resource management
In a multi-crew aircraft such as the B737, pilots must successfully interact with each other, their aircraft, and their environment, using associated checklists and company SOPs to effectively manage threats, errors, or undesired aircraft states that may be encountered. As a result, any investigation involving a multi-crew cockpit must examine crew resource management (CRM) factors to determine what, if any, breakdowns may have occurred. The following sections will examine the current regulatory environment as it pertains to CRM, CRM instructor accreditation, and CRM training at First Air.
The objective of CRM is to reduce human error in aviation. A widely accepted definition of CRM is the effective use of all human, hardware, and information resources available to the flight crew to ensure safe and efficient flight operations.
This goal is accomplished by training flight crews to employ a variety of strategies to help improve effectiveness. Unlike aircraft handling skills, CRM training focuses on critical cognitive and interpersonal skills. Initial CRM training received by flight crews lays the foundation for those core CRM skills. Once a foundation of core CRM skills has been established, recurrent training sessions help reinforce those critical skills and provide flight crews with opportunities to hone the skills they were taught during initial CRM training. Research has shown that flight crews with recent CRM training are better able to deal with novel situations than flight crews without recent CRM training.Footnote 104
1.17.7.2. Evolution of crew resource management training regulations
In 1995, the TSB issued Recommendation A95-11Footnote 105 to TC, calling for CRM and decision-making training to be mandatory for all operators and aircrew involved in commercial aviation. However, TC's response to Recommendation A95-11 indicated that it would be introducing only regulations requiring CRM training for CAR Subpart 705 operators. As a result, the TSB assessment of TC's response was Satisfactory in Part.Footnote 106
On 10 October 1996, TC introduced CRM training requirements for CAR 705 airline operators. The requirement came into effect as Commercial Air Service Standards (CASS) 725.124(39):Crew Resource Management Training. In 2004, the title was amended to “CASS 725.124(39):Crew Resource Management Training for Crew Members” to broaden the scope beyond pilots. The remainder of this standard has not been amended since its inception in 1996.
The following is quoted directly from CASS 725.124(39):Footnote 107
An air operator shall provide Crew Resource Management Training (CRM) in accordance with the following:
Initial training is required for all crew members and shall cover the subjects in both (a) and (b):
attitudes and behaviours;
communication skills;
problem solving;
human factors;
conflict resolution;
decision making;
team building and maintenance; and
workload management.
Annual training in safety and emergency procedures. It shall include, as applicable, joint participation of pilots and flight attendants and cover the following items:
relationship of crew members;
review of accidents/incidents of air operators;
presentation and discussion of selected coordinated emergency
procedures (practice of CRM skills); and
crew member evacuation drills, including debriefing.
TC Air Carrier Advisory Circular no. 0117 (dated 15 April 1997),Footnote 108 provides clarification of the interpretation of CASS 725.124(39).
Although the required subjects are outlined in CASS 725.124(39), there are no standards that define the required content or minimum course length, nor is there a requirement that the actual training material be approved by TC. To show compliance with CASS 725.124(39), CAR 705 operators are simply required to submit their initial and recurrent CRM training plans to the regional TC office for approval.
Normally, the CRM training plan is submitted as part of the company operations manual(COM) or other company manual. After TC receives the CRM training plan, the proposed content of the CRM training session is compared to the list of required items in CASS 725.124(39). Once a CRM training plan is approved, TC maintains very little oversight over the CRM training sessions, and there is no requirement for TC to attend a company's CRM course as part of the approval process.
Additionally, CASS 725.124(39)(b)provides little guidance to operators regarding the minimum requirements for recurrent CRM training, and none of the core subjects identified in section (a) of CASS 725.124(39) are listed. There is no requirement to revisit any of the subjects covered during initial CRM training. Consequently, operators have substantial latitude in terms of what is taught during recurrent CRM training sessions, how it is taught, and the training time allocated.
Before 2003, TC was actively involved in teaching CRM to different organizations and flight crews across the country. This teaching was done to assist operators in meeting the requirements of CASS 725.124(39). To assist with the delivery of the training, TC developed a 2-day initial CRM course (TP 13689: Crew Resources Management) in the mid-1990s, and made it available for purchase. The training package consists of 9 different presentations, for a total of 187 slides. The TC CRM course was largely intended to increase awareness of CRM concepts, rather than providing participants with practical decision-making and communication tools (i.e., models and/or strategies) that could be easily transferred into a procedurally structured multi-crew environment. According to the TC CRM instructor handbook, the presentations in the training package meet the requirements of CASS 725.124(39). However, there is no overarching framework that determines the order in which the TC CRM training material is presented. The TC CRM presentations may be presented in any order, based on the preference of the individual conducting the training.Footnote 109 According to TP13689E, there is a lot of information to cover in 2 days of training.
The TC CRM course has often served as a template for initial CRM training. However, the material in the handbook covers only the items listed in CASS 725.124(39)(a). It does not provide any guidance regarding the requirements outlined in CASS 725.124(39)(b), and it does not address many of the unique challenges that a pilot may encounter while flying a particular operation.
Effective 01 April 2003, TC discontinued the delivery of these workshops, announcing in Aviation Safety Letter Issue 1/2003 that TC was refocusing its “resources to those activities with the greatest safety benefit.” The aviation safety letter further stated that the System Safety program was refocusing “energies and resources to meet new priorities and address evolving issues and directions, such as safety management system (SMS) and initiatives to reduce runway incursions.”Footnote 110
In January 2007, a King Air A100 crashed in Sandy Bay, Saskatchewan. The investigation identified several safety issues related to CRM. The Board released investigation report A07C0001 on 14 October 2009, and in Recommendation A09-02, recommended that:Footnote 111
[t]he Department of Transport require commercial air operators to provide contemporary crew resource management (CRM) training for Canadian Aviation Regulations (CARs) subpart 703 air taxi and CARs subpart 704 commuter pilots.
TSB Aviation Investigation Report A09A0016 highlighted the risks associated with the current CRM regulation and standard in Canada. As a result of the investigation, the TSB issued a Finding as to Risk about the current CRM regulation and standards for CAR 705 airline operators, stating that “there is a risk that flight crews may not be trained in the latest threat and error management techniques.”
TC's subsequent action included a focus group comprising TC and industry representatives, which met in January 2012. As part of its mandate, the focus group was directed to determine an acceptable length for CRM training. The group was also asked to determine which instructor qualifications should be required to provide CRM training and how to implement an accreditation program.
The final report of the CRM Training Focus Group, dated 29 February 2012, proposed components of a contemporary CRM training standard. The focus group submitted recommendations to the Civil Aviation Regulatory Committee (CARC)Footnote 112 that included adoption of the ICAO-endorsed threat-and-error management (TEM) model and the application of scenario-based training. However, the focus group report indicated that “Transport Canada should not mandate specific instructor qualifications nor should it embark on a CRM instructor accreditation program.” In addition, the focus group also recommended against establishing a set time for CRM course duration.
The CARC accepted the TC focus group recommendations, and on 24 April 2012, directed that a contemporary CRM training regulation and standard should be developed for CAR Subparts 702, 703, 704, and 705. The standard is to include the TEM model to enhance flight crews' abilities to communicate effectively, assess conditions, and make appropriate decisions in critical situations. TC has assigned a team leader with the task of developing a project plan. This project has yet to be completed.
There have been similar calls for extending CRM training in the US. In 2009, the National Transportation Safety Board (NTSB) identified the need to improve CRM training as one of its top aviation-related safety concerns.Footnote 113 On 01 May 2009, the FAA responded by issuing a notice of proposed rulemaking (NPRM) that would require Part 135 operatorsFootnote 114 to provide CRM training to all crew members, including pilots and flight attendants.Footnote 115
Despite the fact that the CRM regulations in Canada have not been updated to reflect modern CRM concepts, some of these concepts have already been integrated into other TC-led programs. For example, the Advanced Qualification Program,Footnote 116 the Approved Check Pilot program,Footnote 117 and the Multi-Crew Pilot LicenceFootnote 118 place considerable emphasis on threat-and-error management concepts and strategies. In addition, each of these programs also highlights the importance of being able to evaluate these skills as part of a proficiency-based training program.
1.17.7.3. Industry-recognized phases of crew resource management training
There are a variety of CRM standards and regulations in place throughout the world. Despite these differences, there is a general consensus among the aviation community that CRM programs should consist of 3 distinct phases of training.Footnote 119
The first phase is indoctrination and awareness training. This phase introduces candidates to basic CRM concepts and strategies. Studies have shown that CRM indoctrination training can result in significant improvements in attitudes toward crew coordination and flight deck management.Footnote 120
The second phase is practice, feedback, and recurrent training. During the early years of CRM, the skills were taught separately from technical knowledge and skills. In recent years, there has been increased recognition that CRM training would be more effective if it was integrated with technical training from the earliest stages of the aircrew training regime.Footnote 121 CRM training programs that include recurrent training and the actual practice of CRM strategies have been shown to produce significant changes in flight crew performance during line-oriented flight training sessions and during flights.Footnote 122
The third phase is continuing reinforcement. This phase involves making CRM more than just an aspect of flight crew training, and starts with management level buy-in of the CRM concepts. An effective way of continual reinforcement is to embed critical CRM skills and behaviours within company SOPs to make CRM an integral aspect of all training and operations.Footnote 123
1.17.7.4. Latest developments in the field of crew resource management
Earlier generations of CRM training were very modular, and were not integrated into an overall theme or overarching framework. As a result, older CRM programs typically consisted of presentations about CRM topics that focused more on awareness training than on providing flight crew with actual CRM strategies that could be employed during training and operations. CRM training has been continually refined to optimize the effectiveness and relevancy of the training. TSB Aviation Investigation Report A09A0016 provides an explanation of the evolution of CRM and its various generations.
The most recent development in CRM focuses on TEM. TEM advocates the careful analysis of potential hazards and taking appropriate steps to avoid, trap, or mitigate threats and errors before they lead to an undesired aircraft state. In other words, TEM stresses anticipation, recognition, and recovery as the key principles behind threat and error management.Footnote 124 By using actual safety data from an operator, current generations of CRM are able to target specific areas of an operation that pose the greatest risk. TEM also recognizes the importance of undesired aircraft state management, as it represents the last opportunity for flight crews to prevent an adverse outcome.Footnote 125
Perhaps the most important element of current CRM training is that it is directly transferable into the aircraft. Flight crews are taught specific skills and strategies that can be used and evaluated during training and operations. This aspect makes it easier to give and receive feedback regarding a flight crew's CRM during a flight.
There is no regulatory requirement in Canada to teach the latest generation of CRM training. Currently, the only requirements are those that are identified in CASS 725.124(39).
1.17.8. Crew resource management best practices
1.17.8.1. General
There are a number of CRM best practices, which are discussed in TSB Aviation Investigation Report A09A0016. This section will highlight some CRM best practices as they apply to SOPs and checklists, problem solving and decision making, crew communications and workload management.
1.17.8.2. Situational awareness
Situational awareness is defined as “the continuous extraction of environmental information, the integration of this information with previous knowledge to form a coherent mental picture, and the use of that picture in directing further perception and anticipating future events.”Footnote 126
Flight crew actions need to be based on the same understanding of the current state of the aircraft, the intended flight plan, and the threats to these activities in order to perform in a coordinated, efficient, and safe manner. This common understanding between the crew members is referred to as team or shared situational awareness.Footnote 127,Footnote 128
Individual situational awareness describes how a crew member interprets, projects and takes action on the moment-to-moment changes in the aircraft state. Shared situational awareness describes how each pilot's awareness of the situation needs to be consistent with that of the other pilot while working on the same tasks. When this understanding is consistent, crews can effectively anticipate and coordinate their actions toward achieving their common goal.
Shared situational awareness is developed and maintained by a crew through a number of discrete and continuous behaviours.
Discrete behaviours include flight planning, in-flight briefings, and identification of key points in the flight, such as attaining minimum altitudes. These activities are planned checkpoints to describe current state and future plans and to provide an opportunity for setting, and checking that all crew members have, the same understanding.
Continuous behaviours include threat and error management, callouts of changes of aircraft state and instrument setting/mode, and communication of changes to plans. These behaviours ensure that information and state changes are communicated between crew members to update the shared situational awareness on an ongoing basis. All of these are aspects of CRM that enable effective crew interactions. Such continuous behaviours are influenced by the training and operational approach taken by operators.
In addition to the behaviours described above, 2 other key aspects of maintaining shared situational awareness are:
Monitoring the reactions and mood of other crew members to identify any signs that they are confused, uncomfortable, or disengaged, which are potential indicators that the shared situational awareness is breaking down; and
Taking appropriate remedial action to re-engage the other crew member and resolve their confusion or discomfort.
1.17.8.3. Problem solving and decision making
SOPs represent an important information resource available to pilots to assist with problem solving and decision making. SOPs are designed to help pilots operate within organizational risk-management boundaries and maintain situational awareness through the use of predetermined procedures and standardized phraseology.
Flight-crew problem solving can be described as a multi-step process, which includes decision making as an integral part. The crew must first recognize that there is a problem, gather information about it, and then use that information to define the problem. They must then produce possible solutions, decide which solution is best, and implement the solution. Finally, they must evaluate the results of the solution used to determine whether the problem has been solved. If the problem has not been solved, the crew may need to repeat the process.Footnote 129 As explained in an earlier TSB aviation investigation report:Footnote 130
Effective decision making involves the accurate understanding of the situation, an appreciation of the implications of the current situation, formulation of a plan(s) and contingencies, followed by the implementation of the best course of action. Equally important is the crew's ability to recognize changes in their situation and to reinitiate the decision-making process to ensure that changes are accounted for and plans modified accordingly.
Inaccurate perception or inadequate consideration of the potential implications of a situation increases the risk that a decision will produce an adverse outcome that may result in an undesired aircraft state.
Increased stress levels can adversely impact a pilot's ability to perceive and evaluate cues from the environment, and may result in attentional narrowing.Footnote 131 In many cases, this attentional narrowing can lead to confirmation bias, which causes people to seek out cues that support the desired course of action, to the possible exclusion of critical cues that may support an alternate, less desirable hypothesis.Footnote 132 The danger that this phenomenon presents is that potentially serious outcomes may not be given the appropriate level of consideration when determining the best possible course of action. As a result, it is crucial that pilots continually re-evaluate their situation to determine whether they accurately perceive the situation and whether the plan is working out as expected or a change in the plan is required.
Another important aspect of the decision-making process is the concept of shared mental models.Footnote 133 An individual's mental model is largely dependent on their understanding of the circumstances, expectations about the future, and past experience. The experience, or knowledge, that persons bring to a situation plays a significant role in their decision-making process.
In a crew environment, every effort should be made to align mental models. If the crew is unable to align mental models due to differences in personality or communication style, critical information may not be accounted for when considering the potential implications of a situation and during the formulation of plans and contingencies. From a CRM standpoint, effective communication plays a critical role in the alignment of the crew's mental models. However, these communication skills require practice and reinforcement to be effective, particularly during periods of high workload, such as during an instrument approach or an abnormal situation.
1.17.8.4. Crew communications
In order to align mental models, improve crew situational awareness, and optimize the decision-making process, crews must be effective communicators. This requirement can be a challenge in the cockpit when faced with time pressure, abnormal situations, and competing priorities. To enable pilots to communicate effectively in high workload situations, SOPs provide standard phraseology, which enables rapid communication and understanding.
Modern CRM programs highlight barriers to effective communication and provide multiple communication strategies that allow individuals to select the most appropriate strategy depending on the severity of the situation, the time available, and the other person(s) involved in the communication process.
Crew members must feel comfortable in providing input to a captain to assist decision making. Modern CRM training encourages FOs to assert themselves. However, self-assertion can be very difficult for some people, and ineffective assertion has been a factor in other accidents.Footnote 134 Often ineffective assertion is linked with ineffective communication. Modern CRM training specifically addresses these issues.
It is generally accepted that crew members should assert themselves when they are unsure of something or if there is a genuine concern about the current course of action. Ideally, doing so begins with non-threatening statements or questions. If those efforts fail to address the concern, then a more assertive approach must be taken. S. Dekker explains, in Drift into Failure, that:Footnote 135
… the collaborative operation of machinery in time critical situations assumes the use of unmitigated language―language that doesn't hedge, qualify, weaken or soften, but that delivers unvarnished and unambiguous messages. People generally have a really hard time doing that, because they are not the machine they are operating. They are people, with feelings and social expectations about relationships. Only constant training and indoctrination, as well as positive reinforcement, can help build confidence and acceptance for the use of unmitigated language.
Escalation in communication strategies can be difficult. If FOs are expected to assert themselves, they must be provided with the proper level of training in communication escalation strategies and be given an opportunity to practise those skills.
1.17.8.5. Escalation of assertion by first officers
One such CRM communication tool is the Probing, Alerting, Challenging, and Emergency Warning (PACE) Model.Footnote 136 The PACE model provides pilots, especially FOs, with a series of communication strategies designed to allow for a natural escalation of assertion, depending on the circumstances at the time. Escalation can be progressive or immediate depending on the threat level identified.
The PACE model starts with the use of probing and unambiguous questions when safety is not in jeopardy and there is time to ask questions. This step is done to improve the crew's understanding of the situation and to help align mental models in a non-threatening way.
The next step in the process is to alert the other pilot of the concern. At this stage, the individual voices a specific concern to make sure that the other person understands the concern. This may be done either after probing or immediately if the pilot stating the concern understands that the current course of action is not appropriate. Unambiguous and direct language is essential for an effective alert.
The third step in the escalating process is a challenging statement. The challenge statement unambiguously presents the other person with a clear description of the consequences associated with continuing on a particular course of action, and provides an alternative course of action.
The final step is emergency intervention, with the PNF taking over control of the aircraft in situations with danger or where time is critical. Table 11 provides an exemplar application of the PACE model escalating to the point of taking control.
Table 11. Exemplar application of the PACE model escalating to the point of taking control
P − probing
“Captain, are you showing us below the glideslope?”
A − alerting
“Captain, I show us 1 dot below the glideslope.”
C − challenging
“Captain, we are descending further below the glideslope. We are at risk of crashing. We have to go around.”
E − emergency
“Captain, I have control. Go around, max power, flaps 10.”
While the PACE model provides a series of communication strategies that range from non-threatening to very directive, the individual does not have to start at the beginning of the model if the situation dictates otherwise. If needed, an individual can go directly from probe to emergency, or in some drastic situations, directly to the emergency statement. The underlying principle behind this model is to ensure that all parties understand the situation and that everyone is thinking in a similar way regarding the proposed course of action.
In effect, the model allows the organization to give the FO the responsibility to not only take control but to also take command of the aircraft from the captain when necessary. Additionally, and importantly, it delegates to the FO the authority to do so.
Ideally, the model should be supported by company philosophy, addressed in an organization's policy, and implemented by procedures customized to the operator's needs. Practical training sessions are necessary to reinforce the philosophical, policy-related, and procedural concepts and phraseology through their application in realistic operational scenarios.
Investigations by the TSB and other international agencies have documented incidents and accidents where the FO might have taken control from the captain.
On 23 July 2011, a Sikorsky S-92A helicopter departed an offshore vessel. The captain's control inputs resulted in a 23° nose-high, decelerating pitch attitude. The captain, subtly incapacitated possibly due to spatial disorientation, did not apply control inputs to recover from the unusual attitude. This inaction contributed to the excessive amount of altitude that was lost during the inadvertent descent. Contrary to what is stated in the two-challenge rule in the operator's SOPs, the first officer did not take control of the helicopter when the appropriate action was not taken to recover from the inadvertent descent. The descent was arrested 38 feet above the surface of the water. The helicopter was not damaged, and no one was injured.Footnote 137
On 22 May 2010, a B737-800 overran the runway during landing at Mangalore, India. The aircraft was destroyed; there were 158 fatalities and 8 survivors. The first officer had identified that the approach was unstable and advised the captain to go around 3 times, but the captain continued the approach to a landing. The first officer did not take control of the aircraft in the deteriorating situation. The investigation cited ambiguity in various instructions empowering the first officer to initiate a go-around as a contributory factor to the accident.Footnote 138
On 07 March 2007, a B737-400 aircraft overran the runway during landing at Yogyakarta, Indonesia. The aircraft was destroyed; there were 21 fatalities and 119 survivors. The captain was the pilot flying and continued an unstable approach to a landing, despite company procedures that required a go-around. Contrary to company instructions, the first officer did not take control of the aircraft from the captain when the captain repeatedly ignored warnings to go around.Footnote 139
1.17.8.6. Workload management
Workload is a function of the number of tasks that must be completed within a given amount of time. If the number of tasks that must be completed increases, or if time available decreases, workload increases. Therefore, in order to reduce workload, one must either reduce the number of tasks that must be completed or increase the time available to complete those tasks. Task saturation is a condition wherein the number of tasks to be completed in a given time exceeds the pilots' capacity to perform them, and some tasks are shed or deferred.
The industry standard for multi-crew aircraft is to designate 1 crew member as PF and the other pilot as PNF or pilot monitoring (PM). This division of duties helps optimize crew efficiency, prevent task saturation, and ensure that errors are trapped before they lead to an undesired aircraft state or adverse consequence.
The PF is responsible for controlling the aircraft, and the PNF/PM is responsible for handling other crew duties related to radio communications, checklist management, monitoring the actions of the PF, and monitoring the progress of the flight. Within the past decade, there has been a shift from the PNF designation to PM. The reason for this shift is to emphasize the necessity of monitoring the aircraft state and actions of the PF.Footnote 140
The proper allocation of responsibilities in a cockpit helps free up critical mental capacity so that crew members are better able to process cues from the environment, making it easier to detect deviations from the planned course of action. If a flight crew starts to fall behind, they can quickly find themselves under increased time pressure. This situation can cause workload levels to reach critical levels. When that happens, the extra mental capacity required to catch up with what's happening can lead to cues from the environment going undetected.
For example, if a flight crew is rushed on final approach, they may find it harder to detect and correct for flight path deviations. If a flight crew finds themselves in an excessive workload situation, they must take measures to reduce their workload, especially when in a critical phase of flight, such as during approach and landing. One of the techniques available to flight crews who find themselves nearing task saturation, or in an unsafe position while on final approach, is to execute a go-around. From a workload management standpoint, executing a go-around provides the flight crew with additional time to get caught up, so that workload levels can be reduced to acceptable levels before attempting another approach. Another means of managing workload is to increase time available by modifying the approach profile (i.e., reduce speed, make a 360° turn, and intercept final approach further from the runway).
Page 03.15.1 of the AOM Volume 1 directs users to the company FOM for a complete outline of the duties and responsibilities of flight crew members. The FOM describes the duties and responsibilities of the captain and the FO in sections 1.5.7 and 1.5.8, respectively. First Air designates crew members as PF and PNF. Duties and responsibilities of the PF and PNF are described in detail throughout the AOM Volume 1.
1.17.9. Crew resource management training at First Air
1.17.9.1. General
In accordance with regulations, First Air provides initial and recurrent CRM training to all flight crew. First Air's initial CRM course is taught during new-hire ground schools, while recurrent CRM training is provided at the various First Air bases.
First Air's CRM training requirements are outlined in the First Air Flight Operations Training Manual (FOTM), which was approved by TC. These requirements mimic those outlined in CASS 725.124(39), with the exception that First Air also includes joint crew member training in managing on-board security threats.
The FOTM states that the objective of First Air's CRM training is to “ensure that safe, efficient and pro-active thinking, communications and actions among crew members are understood and practiced.”Footnote 141 While TC inspectors have attended First Air ground school courses in the past, there is no record of TC inspectors ever attending one of First Air's initial CRM courses during those ground school courses. As a result, there is no record of TC having verified that First Air's CRM training program met the applicable CASS.
A review of the captain's training record showed that the captain completed his initial CRM training on 14 February 1997. The captain's last recurrent CRM training at First Air was completed on 19 November 2010, with an expiry date of 01 December 2011.
A review of the FO's training record showed that the FO completed his initial CRM training on 28 September 2007 during his initial ground school at First Air. On the same day, the FO also completed an “Introduction to SMS” session, training on joint security, and training on security requirements for travelling to the US. The FO's last recurrent CRM training at First Air was completed on 09 March 2011, with an expiry date of 01 April 2012.
1.17.9.2. First Air initial crew resource management course
TSB investigators reviewed and observed First Air's initial CRM course. The course was conducted with a group of 4 new-hire pilots, who were taking part in the ATR-42 ground school. The training was scheduled for 1 day, and included the following topics: crew resource management, interference with crew members, and joint security.
The initial CRM course duration was 4.5 hours. The course included presentations on selected CRM topics, videos, 2 case studies, 2 15-minute breaks, and a 50-minute lunch break. One case study addressed a company occurrence, and the other addressed a 1995 occurrence. In addition, 2 videos were shown during the course. The first video (approximately 1 minutes long) was related to fatigue, and the second video (47 minutes) formed the basis of the final case study. See Table 12 for a comparison of the CASS 725.124(39) regulatory requirements and the First Air initial CRM course attended by TSB investigators.
The investigation determined that the material presented during First Air's initial CRM course, with the exception of the 2 case studies, originated from TC's TP13689E Crew Resource Management training package. First Air purchased the TC CRM training material in the early 2000s, and has been using that material since then for its initial CRM course.
Table 12. Comparison of CASS 725.124(39) CRM initial training requirements and First Air initial CRM course
Regulatory requirement [CASS 725.124(39)(a))
First Air initial CRM course (03 April 2012)
Attitudes and behaviours
Not presented
Communications skills
Communication
Problem solving
Not presented
Human factors
Human factors – Fatigue and stress
Conflict resolution
Not presented
Decision making
Not presented
Team building and maintenance
Leadership and team building
Situational awareness (not required by regulation)
Workload management
Not presented
However, First Air does not allocate 2 days for the initial CRM training, as was intended by TC. In order to meet other training requirements, First Air's initial CRM course has been reduced to a portion of 1 day. This practice has been in place for several years, and is consistent with the occurrence FO's training records, which showed that he received training covering 3 other subjects on the same day as his initial CRM course. To remain within the allocated time for initial CRM training during the new-hire course, 5 of the subjects required by CASS 725.124(39) are not taught during First Air's initial CRM course (Table 12).
Although the TC CRM material is dated, several core CRM skills are addressed but were not presented during First Air's initial CRM course. In particular, the “Attitudes and Behaviours” presentation discusses assertive behavior and offers a format that pilots can use to create an assertive statement. That module also includes 1 slide that briefly outlines the PACE model. The TC “Problem Solving and Decision Making” module includes a decision-making model and discusses time pressure and its impact on workload. The TC “Conflict Resolution” presentation advises that adherence to SOPs is one way of preventing conflict, and advocates the use of SOPs to resolve discrepancies in the cockpit. The “Workload Management” presentation discusses the impact of workload on a flight crew's ability to attend to environmental cues, and it advises that the failure to share information or respond to inquiries and deviations from established procedures is a warning sign that someone may be approaching task saturation.
First Air's initial CRM course is taught by 1 of 2 ground training instructors. One instructor serves as the primary CRM instructor. The other individual conducts initial CRM training only when the primary instructor is not available. Both of the ground training instructors at First Air have extensive experience teaching technical courses to flight crew and maintenance personnel. Neither of the CRM instructors had received any formal CRM facilitator/instructor training or accreditation to provide CRM training, nor was it required by regulation. Both instructors demonstrated a strong belief in the value of CRM training as a way of enhancing operations at First Air.
During the initial CRM course attended by the TSB, participation from the course attendees was very low. The instructor made several low-level facilitationFootnote 142 attempts to draw the group into the various discussions, often by asking closed-ended questions. Despite his efforts, the instructor experienced difficulties getting the attendees involved in the course, and the discussion was often moved along by the instructor to avoid delaying the course.
1.17.9.3. First Air recurrent crew resource management training
As identified earlier in the report, the regulatory requirements for recurrent CRM training do not identify any specific CRM subjects that must be taught, and there is no requirement to review any of the CRM topics covered during initial CRM training.
First Air's B737 recurrent joint CRM training is described on page 25.30.6 of its FOTM (AL no. 37, dated 01 April 2006). The training time allocated is 2.25 hours for the CRM-related portion of the training, and another 1.75 hours for the evacuation drills. The topics described coincide with the items listed under CASS 725.124(39)(b).
Recurrent CRM training at First Air is typically done at the various company bases. Whenever possible, the primary CRM instructor teaches the course. However, other training pilots at the remote bases will run recurrent CRM training sessions if the primary CRM instructor is not available.
The TSB also attended one of First Air's recurrent CRM training sessions at the company's main base in Ottawa. This session was taught by the company's primary CRM instructor, and was part of a full day of joint recurrent training on cabin evacuation, firefighting, CRM, interference with crew members, and joint security. Five ATR-42 pilots and 3 flight attendants participated in the training.
The CRM training duration was 2 hours 7 minutes, including a 15-minute break. Topics briefed included leadership, team building, attitudes, communication, decision making, group culture, SOPs, and a case study of a First Air ATR-42 occurrence. Duration allocated to each topic ranged from 5 to 15 minutes. SOPs were described as a means to identify roles, trap errors and guide group performance. They are also used as a source of standard phraseology to eliminate miscommunication and minimize misunderstanding.
Unlike the initial CRM course content, which dates back to the mid-1990s, some of the material covered during the recurrent CRM course included elements of more recent generations of CRM training, such as threat-and-error management concepts.
1.17.10. Crew resource management training facilitation
It is widely accepted that the effectiveness of CRM training is largely dependent on the quality of the delivery, and that the use of high-level facilitation is one of the keys to the success of CRM training.Footnote 143 Facilitation differs from traditional “instruction” in that facilitation is a technique “that helps trainees to discover for themselves what is appropriate and effective, in the context of their own experience and circumstances.”Footnote 144
Facilitation is often described in terms of high, medium, and low. High-level facilitation sees the instructor simply guiding the participants through the learning process. This guidance is typically done using open-ended questions, encouraging discussion, and avoiding answering your own questions or moving along too quickly. At lower levels of facilitation, the instructor makes use of specific questions to try and get participant involvement. Low-level facilitation would be characterized by close-ended questions, since these do not naturally encourage additional discussion and/or opinion.
It may be necessary to periodically employ low-level facilitation throughout a CRM course to keep things moving. However, every effort should be made to return to the highest level of facilitation possible at the earliest opportunity so that students can continue to learn through their own analysis and discussion. Facilitation skills are not easy to master, and like many other skills, they require practice and feedback.
In Canada, CRM instructors are not required to undergo any accreditation process, but are subject to CASS 725.124(4), which specifies general standards for training personnel. TSB investigation A09A0016 identified that the absence of CRM instructor accreditation poses a risk that flight crews will not be trained in the latest CRM techniques.
As a means of ensuring an acceptable standard for CRM instruction and evaluation, the United Kingdom Civil Aviation Authority (CAA) has established a series of stringent accreditation requirements for CRM instructors (CRMIs) and for CRM instructor examiners (CRMIEs).Footnote 145 The accreditation process consists of a minimum experience requirement, completion of an approved CRMI course, and a practical evaluation of an individual's knowledge and skill to instruct or evaluate CRM before they are permitted to carry out those duties. As part of the accreditation process, qualified CRMIs and CRMIEs must renew their qualification every 3 years in order to continue in those roles. This renewal is done to ensure that CRMIs and CRMIEs continue to meet the required standard as CRM training continues to evolve.
In Canada, there are no experience, training or qualification requirements needed to teach CRM. The CRM focus group that submitted recommendations to the CARC in 2012 (section 1.17.7.2) considered the issue of CRM instructor qualifications and accreditation. The group's assessment was that defining and implementing qualifications and accreditation criteria for CRM instructors in Canada would be extremely complex, because each sector of the industry has its own unique demands and hazards. It was judged to be beyond the capacity of TC to develop and implement an accreditation scheme that would be effective and acceptable to 702, 703, 704, and 705 operators and flight crew. The CARC accepted the focus group recommendation that CRM instructor accreditation not be pursued.
1.18. Additional information
1.18.1. Behavioural biases
In their article, “Pressing the Approach”, Berman and Dismukes indicate that humans are subject to biases that can influence flight crew judgment and decision making.Footnote 146 The article discussed the effects of plan continuation bias and expectation bias.
Plan continuation bias is described as a “deep-rooted tendency of individuals to continue their original plan of action even when changing circumstances require a new plan.” The authors' analysis suggested that this bias “results from the interaction of 3 major components: social/organizational influences, the inherent characteristics and limitations of human cognition, and incomplete or ambiguous information.“ Expectation bias is described by the authors as follows:Footnote 147
… when someone expects one situation, he or she is less likely to notice cues indicating that the situation is not quite what it seems… Expectation bias is worsened when crews are required to integrate new information that arrives piecemeal over time in incomplete, sometimes ambiguous, fragments.
1.18.2. Terrain awareness devices
1.18.2.1. Ground proximity warning system
A ground proximity warning system (GPWS) provides a warning to the flight crew when the aeroplane is in potentially hazardous proximity to the earth's surface. GPWS was introduced in the 1970s as a means to combat the high incidence of controlled flight into terrain (CFIT) accidents and near-accidents.
Early GPWS used height above ground (measured by the radio altimeter) and rate of closure to determine when the aircraft was in a potentially hazardous situation. Subsequent improvements incorporated aeroplane configuration (e.g., landing gear status) and instrument landing system (ILS) glideslope deviation. Because the radio altimeter does not look ahead, this early-generation GPWS is unable to predict a sudden change in terrain (for example, when meeting steeply rising ground).
Canadian Aviation Regulations (CAR) 605.37(1) requires all turbo-jet-powered aeroplanes with a weight of more than 15 000 kg (33 069 pounds) and for which a type certificate has been issued authorizing the transport of 10 or more passengers, to be equipped with a GPWS.
In accordance with the regulatory requirement, C-GNWN was equipped with a GPWS as described in section 1.6.3.
1.18.2.2. Introduction of enhanced ground proximity warning system
In 1991, Honeywell introduced its enhanced ground proximity warning system (EGPWS), which was developed in order to overcome the above limitation. This system combines accurate positional knowledge (normally determined from GPS) with a precise 3-dimensional map of the terrain, to look ahead of the aircraft as well as downward. This configuration generates warnings to the pilot if certain parameters are breached. This generation of terrain awareness equipment provides an aural as well as visual warning of the terrain in front of the aircraft. A map display showing the approaching terrain changes from green to amber to red as the aircraft gets progressively closer to obstacles (Figure 11).
Figure 11. Sample display change on enhanced ground proximity warning system (EGPWS) as obstacle approaches
The map display not only presents the crew with information regarding the terrain elevation along the flight path, but also provides additional situational awareness as to aircraft position relative to obstacles and the intended flight path. Improvements in the sources of information used to calculate and predict ground proximity have resulted in earlier warning notices and increased time for crew reaction. There are several different parameters that can trigger a warning.
Subsequently, other manufacturers produced similar systems, which are known collectively as terrain awareness and warning systems (TAWS).
Descent to 500 feet above terrain or nearest runway elevation during a non-precision approach voice callout; and
Terrain display system.
1.18.2.3. Transportation Safety Board recommendation on ground proximity warning systems
Following the CFIT accident involving a Hawker Siddeley HS748 northwest of Sandy Lake, Ontario, on 10 November 1993,Footnote 149 the TSB issued Recommendation A95-10. Most turbo-prop aircraft, some carrying dozens of passengers, continue to operate without the added safety protection of GPWS. Therefore, the Board recommended in A95-10 that:Footnote 150
[t]he Department of Transport require the installation of GPWS on all turbine-powered, IFR-approved, commuter and airline aircraft capable of carrying 10 or more passengers.
Since the issuance of TSB Recommendation A95-10, successive action by Transport Canada (TC) culminated with regulatory amendments, which came into force on 04 July 2012, when they were published in the Canada Gazette, Part 2, Volume 146, no. 14:Footnote 151
These regulatory amendments introduce requirements for the installation of Terrain Awareness Warning Systems (TAWS) equipped with an Enhanced Altitude Accuracy (EAA) function in private turbine-powered aeroplanes configured with six or more passenger seats, excluding pilot seats, and in commercial aeroplanes configured with six or more passenger seats, excluding pilot seats. Operators will have two years from the date on which the Regulations come into force to equip their aeroplanes with TAWS and five years to equip them with EAA.
The TSB determined that the regulatory amendment brought forward by TC exceeds the criteria of this recommendation, and will substantially reduce the safety deficiency identified in Recommendation A95-10. On 05 September 2012, the TSB categorized the response to the recommendation as Fully Satisfactory.
1.18.3. Transportation Safety Board Watchlist
This was a CFIT accident, one of the items on the TSB Watchlist. The Watchlist is a list of transportation safety issues that pose the greatest risk to Canadians. In each case, actions taken to date have been inadequate, and concrete steps must be taken on the part of industry and the regulator to eliminate these risks.
The TSB has investigated numerous collisions with land and water, and has identified deficiencies, made findings, and issued recommendations to further reduce CFIT accidents. Collisions with land and water account for 5% of accidents, but nearly 25% of all fatalities. Between 2000 and 2009, there were 129 accidents of this type in Canada, resulting in 128 fatalities. Since the TSB first placed this issue on its Watchlist, the number of accidents of this type every year has not gone down. In 2010, there were 13; in 2011, there were 14.
1.18.4. Safety management systems
Implemented properly, safety management systems (SMSs) allow aviation companies to identify hazards, manage risks, and develop and follow effective safety processes. Canada's large commercial carriers have been required to have an SMS since 2005.
The transition to SMS has proved to be challenging. Recent investigations by the TSB have highlighted difficulties faced by operators in making the transition from traditional safety management to SMS.Footnote 152
2.0 Analysis
2.1. Introduction
Based on available records, the pilots were certified and qualified for the flight in accordance with existing regulations. The investigation determined that there was nothing to indicate that the performance of the captain or the first officer (FO) was degraded by fatigue or physiological factors.
On this flight, the localizer was not captured, and the flight continued on a heading that progressively deviated to the right of the localizer. As the aircraft deviated to the right, despite instrument indications that the flight was substantially off the localizer centreline and a number of attempts by the FO to communicate the hazard, the captain continued the approach. Additionally, the approach was unstable in several parameters, and the flight continued beyond the point at which a go-around should have been conducted in accordance with company policy. A ground proximity warning system (GPWS) warning prompted the crew to initiate a go-around, but this action was initiated too late to avoid impact with terrain.
This analysis will focus on the following:
Why the aircraft did not capture the localizer and glideslope;
The effect of compass errors;
Aircraft navigational equipment;
Why the captain believed that the aircraft had captured the localizer;
Why the crew were unable to reconcile their differing awareness of the situation;
Why the captain continued the approach; and
Adaptations of SOPs.
2.2. FAB6560 approach planning
After First Air flight 6560 (FAB6560) had departed from Yellowknife (CYZF), the ceiling and visibility at Resolute Bay (CYRB) had fluctuated as low as 200 feet and ½ statute mile (sm), although the 1600 weather observation reported 10 miles visibility and overcast ceiling at 700 feet. The wind was from the south, favouring Runway 17T. The weather conditions at CYRB during the arrival of FAB6560 were such that a visual approach was not possible and an instrument approach was required.
Carrying out an approach to Runway 17T would take more time and fuel, as well as requiring a non-precision approach rather than an instrument landing system (ILS) approach. The tailwind was within aircraft limitations, and the ILS Runway 35 True (35T) would save time and fuel with a straight-in approach. Furthermore, the ILS is a precision approach, which involves lower risk and less workload than a non-precision approach. The straight-in ILS 35T provided many benefits, with only an in-limits tailwind as a negative factor.
Before commencing descent, the captain advised the FO that he planned to use area navigation (RNAV)Footnote 153 to navigate to the localizer and then switch from global positioning system (GPS) to VHF NAV (very high frequency navigation). The investigation determined that the plan to transition from en-route navigation to approach can be interpreted in 2 different ways.
First, the captain may have intended to employ a non-standard method to use the GPS to align the aircraft with the localizer on final approach, and then switch to VHF NAV. Second, the captain may have intended to use the GPS to navigate to a point just before MUSAT waypoint, where the switch to VHF NAV would occur.
Although the captain's approach briefing provided information as to approach speeds and some minimum altitudes, the briefing did not include information regarding the intended nav-aid configuration during the approach or minimum safe altitudes during the arrival phase. The captain's approach briefing was non-standard and incomplete.
The consequence of an abbreviated approach briefing is that a crew may not be adequately prepared for the approach. Additionally, one of the main purposes of briefings is to ensure that both pilots have the same expectations and foundation for shared situational awareness.
2.3. Descent initiation and management
At about 150 miles to CYRB, before commencing descent, the FO pointed out to the captain that their ground speed was high. The high ground speed was due to the tailwind component at cruising altitude.
The captain indicated that he would commence descent at 105 nautical miles (nm) from CYRB. This communication indicates that the captain was aware of the effect of the tailwind and had considered it in his descent planning (100 nm with zero wind at top of descent [TOD], plus a correction for wind). However, the 5-nm correction that the captain had applied was less than the 17-nm adjustment actually required to compensate for the 63-knot tailwind.
At 1622:16, the FO requested descent clearance. At this time, the aircraft was about 112 nm from touchdown at CYRB. The descent clearance was issued at 1623:29, at which time the aircraft was about 103 nm from touchdown. Descent began at 1623:40 and 101 nm from touchdown, closer to CYRB than the captain had planned for and 16 nm closer than required for the wind.
Until commencing descent, the autopilot pitch mode selector was likely in ALT HOLD (altitude hold) to maintain the cruise altitude. To initiate descent, the captain would have selected the autopilot pitch mode selector to OFF. The autopilot pitch channel would then operate in manual pitch CWS (control wheel steering) at the low detent (5 pounds). In this mode, the autopilot would maintain the pitch attitude set by the pilot using the control column.
The late initiation of descent resulted in the aircraft being high on the descent profile. The excess height could have been corrected in several ways:
By increasing rate of descent and airspeed;
By making a 360° turn;
By adjusting the localizer intercept point from MUSAT to a point further away from the runway; or
By use of speed brakes.
The captain maintained track toward MUSAT, and increased airspeed and descent rate. Consequently, the flight descended through 10 000 feet at 310 knots indicated airspeed (KIAS), well in excess of the 250-KIAS speed limit. With regard to the threat-and-error management model, the excessive airspeed was an undesired aircraft state.
The captain reduced airspeed to 184 KIAS by the time the flight began the turn onto final approach. This speed was within normal operating parameters for this phase of flight, and did not prevent the crew from configuring the aircraft. The aircraft was about 600 feet above the nominal descent profile.
The late initiation and subsequent management of the descent resulted in the aircraft turning onto final approach at a higher altitude than desired. These factors increased the crew's workload and reduced their capacity to assess and resolve navigational issues during the remainder of the approach.
2.4. Compass operations
2.4.1. Heading comparator
Illumination of the heading comparator would almost certainly result in discussion between the pilots about the comparator. Other than when completing the compass portion of the in-range check at 1625:07, the pilots did not discuss the compasses, heading, or heading comparator during the recorded portion of the flight. Therefore, both compass systems were almost certainly operating within the specified heading comparator parameters.
With wings level, the heading comparator should illuminate when the headings differ by 6° ±2°. The ±2° tolerance means the 6° heading-difference parameter could be as little as 4° or as much as 8°. Without illumination of the heading comparator, it is likely that the pilots would consider any heading difference to be insignificant, and possible that it might not be perceived. The complete absence of any discussion about a heading split indicates that if a heading split did exist, it was within the comparator threshold parameters and the pilots either considered it insignificant or were unaware of it. The maximum heading difference between the no. 1 and no. 2 compass systems during flight FAB6560 likely did not exceed 8° with wings level.
Physical examination of the compass controllers was inconclusive.
The investigation considered whether the compass controllers were set to magnetic (MAG), because operation in MAG would result in significant heading changes because of the proximity of the magnetic north pole to the track of FAB6560. Radar data show that FAB6560 was tracking 037°T when the crew re-slaved the compasses at 1625:07. Calculations were done to determine the likely setting of the compass controllers based on the recorded compass heading, radar data, and wind drift. The recorded heading is not congruent with the compass controllers being set to MAG.
The flight data recorder (FDR) data show only the one instance of compass adjustment, at 1625:07. At about the same time, during the pre-descent check, both pilots responded with “DG” (i.e., directional gyro) to the compass challenge. It is likely that the pilots selected the switch on both compass controllers to the DG position when the compasses were initially switched from MAG to DG at an undetermined time, before the commencement of valid FDR data at 1458:57.5.
2.4.3. Compass controllers hemisphere selection
While operating in DG, inadvertent selection of the hemisphere switch on one controller to N and on the other controller to S would result in the 2 compasses developing a significant heading difference fairly quickly. Such a heading difference would also quickly trigger the heading comparator. Because there was no discussion between the pilots about the comparator, it is likely that both hemisphere switches were set to the same position.
First Air aircraft operate in the northern hemisphere; consequently, deliberate selection of S on the hemisphere switch is extremely unlikely. Therefore, it is very likely that both hemisphere switches were set to N.
2.4.4. Compass controller latitude compensators
The compasses were required to be set to DG when FAB6560 entered the Northern Domestic Airspace at RIBUN waypoint. While the investigation could not determine when the compasses were set to DG, further discussion will be based on the premise that it occurred at RIBUN.
FAB6560 crossed both latitudes 66°N and 68°N before reaching Cambridge Bay (CB). The compass controller latitude compensators were found set at 68° (no. 1) and 66° (no. 2). While physical examination could not determine the position of the latitude compensators at impact, their positions as found are reasonable given the track of flight FAB6560 and the company's operating procedures and practices. It is likely that these settings were made by the FAB6560 crew.
2.4.5. Real precession
Given the heading change rates recorded with the wings level, it is likely that the heading comparator would have illuminated if one DG had excessive real precession. However, the pilots did not mention or discuss illumination of a heading comparator. It is very unlikely that both DGs would simultaneously experience real precession of the same magnitude and direction, thereby preventing the comparator threshold from being exceeded. Therefore, it is considered unlikely that real precession was the sole cause of the heading drift identified in the FAB6560 FDR data. It is impossible to isolate real precession from apparent precession in the recorded heading data; therefore, further analysis will be based on the premise that the real precession did not exceed the ±1° per-hour tolerance.
2.4.6. Earth rate precession
With the no. 2 compass controller set to DG and 66°N latitude, torque would have been applied to the no. 2 DG to correct for earth rate at 6°N. However, some residual earth rate (i.e., difference between earth rate at the current latitude and earth rate at the latitude selected) would exist. The effect of earth rate was examined for 2 periods: 1458:57.5 to 1548:25 (commencement of valid data until turn at CB) and 1549:13 to 1612:00 (turn at CB until turn at 72° N, 100° 45′ W).
During the 2 periods examined, which exhibited recorded heading drift of 25° per hour, the residual earth rate varied from −0.54° per hour to 0.22° per hour. It is very unlikely that uncorrected earth rate precession was the sole cause of the recorded heading drift.
2.4.7. Earth transport rate precession
The C-11B compass system does not incorporate any means to correct for earth transport rate. The effect of earth transport rate was examined for 2 periods: 1458:57.5 to 1548:25 and 1549:13 to 1612:00.
During the 2 periods examined, which exhibited recorded heading drift of 25° per hour, the residual earth transport rate varied from −8.51° per hour to −9.34° per hour. It is very unlikely that uncorrected earth transport rate precession was the sole cause of the recorded heading drift.
2.4.8. Precession summary
The sum of the maximum values discussed above for real precession (1° per hour), residual earth rate (0.54° per hour), and uncorrected earth transport rate (9.34° per hour) is 10.88° per hour. However, during the 2 periods discussed above, the recorded heading from the no. 2 compass drifted at 25° per hour. Therefore, the recorded no. 2 compass drift differs substantially from total calculated precession. The differing direction and magnitude of the heading drift observed, in conjunction with the number of turns made by the aircraft, makes it impossible to draw conclusions regarding the effect of real and apparent precession on the compass systems during the final 17 minutes of the flight.
2.4.9. No. 1 and no. 2 compass systems behaviour
Because of the absence of any pilot discussion about the heading comparator, it was earlier concluded that the maximum heading difference between the compass systems during flight likely did not exceed 8° with wings level. This means that both compass systems were in agreement within comparator tolerances, and would have been so even during the period when the recorded no. 2 compass heading was drifting significantly. Therefore, it is likely that the no. 1 compass system was also drifting, but within the comparator heading difference threshold.
The heading drift recorded on the FDR is not consistent with normal compass operation. Despite extensive consultation with Boeing, Honeywell, Western Avionics, First Air, and the Royal Canadian Air Force (RCAF) School of Air Navigation, the investigation was unable to determine why this compass behaviour occurred.
2.4.10. Compass error
This section contains discussion of true north (T) headings, bearings, and tracks, as well as the recorded erroneous heading and expected resultant instrument indications. Values not specifically identified as true north relate to the erroneous indications the compass system provided.
The crew almost certainly used the GPS/non-directional beacon (NDB) method of adjusting the compasses. The Resolute Bay non-directional beacon (RB NDB) was the only usable beacon within range. Entering the RB NDB identifier in the GPS should have resulted in a bearing of 029°T from the current aircraft position to RB NDB.
Radar and wind data show that the aircraft was tracking 037°T to MUSAT with no wind drift. The correct post-procedure radio-magnetic indicator (RMI) indications, assuming no NDB/ADF (automatic direction finding) error influence, should have been ADF bearing pointer head at 029°T, with the resultant true heading 037°, under the lubber line (Figure 12).
However, on completion of the procedure, the recorded heading from the no. 2 compass was 029°, which indicates that the RMI lubber line heading should also have been 029°. Therefore, the indicated bearing to the RB beacon displayed to the crew on the FO's RMI should have been 021° (Figure 13).
Figure 12. 1625:07: Exemplar of first officer (FO) radio-magnetic indicator (RMI) (no. 2 compass), showing expected true indications with no heading error
On completion of the heading setting procedure, the heading should have been 037°T. The recorded heading was 029°, an error of −8°. At least 2 reasons for this error were possible. First, it is possible that the pilots incorrectly executed the final step in the procedure, setting the bearing to RB NDB, 029°, under the lubber line rather than the head of the ADF pointer. Second, it is possible that the heading setting was affected by inaccuracies inherent to the ADF/NDB system. Either scenario is considered equally likely.
The consequence of the heading setting error was that, immediately after the procedure was completed, the crew heading indication for the no. 2 compass was incorrectly depicted as 029° rather than 037°T.
Wind triangle calculations for 1638:00 indicate that the heading required for the aircraft to track 038°TFootnote 154 is 039°T, while the recorded heading was 024°. This difference means that the heading error had increased to about −15°.
Wind triangle calculations for 1640:35 show that the heading required for the aircraft to track 351°TFootnote 155 is 348°T, while the recorded heading was 331°. This difference means that the heading error had increased to about −17°.
An error introduced when the compasses were initially adjusted, combined with subsequent compass drift, resulted in a compass error of −17° during final approach. At 1640:35, the calculated actual aircraft heading was 348°T, while the recorded no. 2 heading was 331°.
2.5. In-range check
Until this point in the flight, the captain likely had the aircraft configured for GPS navigation. This configuration required the following selections:Footnote 156
Captain and FO MD-41 − on GPS
A/P SELECT annunciator/switch − GPS selected
Autopilot in MAN mode
Heading switch on HDG SEL
Flight directors in HDG
HSI course set to current GPS track
At 1636:23, the captain called for the below-the-line portion of the in-range checklist. Following the FO's challenge for the NAV (navigation) switches, both pilots responded “VHF NAV.” Therefore, it is likely that both pilots selected their respective MD-41 to NAV at this time. Doing so would change the HSI display from GPS to NAV, and would also remove the GPS signals from the autopilot. Other selections that would normally be made by the crew at this time are as follows:Footnote 157
Autopilot to VOR/LOC
Autopilot pitch mode selector remains OFF
A/P SELECT annunciator/switch − GPS deselected
Heading switch to HDG SEL
Flight directors to AUTO APP
HSI course selector turned to 347 (localizer inbound track)
Company pilots rarely used the autopilot AUTO APP or MAN G/S (manual glideslope) modes for ILS approaches, instead preferring to use VOR/LOC mode to track the localizer and CWS pitch inputs to follow the glideslope. Consequently, it is almost certain that AUTO APP or MAN G/S were not selected at this time.
2.6. Navigational modes during turn onto final approach
2.6.1. General
Radar ground speed on the inbound track to MUSAT immediately before the turn began was 229 knots. It is unlikely that this speed prevented the autopilot from capturing the localizer; however, it likely caused the flight to overshoot the localizer centreline during the turn to final. The localizer intercept angle of 51° was within the recommended range indicated in the aircraft operations manual (AOM). Therefore, it is unlikely that the localizer intercept angle prevented the aircraft from capturing the localizer.
The investigation could not determine the precise means by which the aircraft turned at MUSAT. Consequently, 2 plausible scenarios are discussed in sections 2.6.2 and 2.6.3.
As FAB6560 approached MUSAT, the crew switched from GPS to VHF NAV. At this point, the following conditions were common to both scenarios discussed below:
VHF NAV no. 1 − IRB ILS/DME 110.30
VHF NAV no. 2 − IRB ILS/DME 110.30
GPS no. 1 − RNAV 35T approach
GPS no. 2 − RNAV 35T approach
For both scenarios, after completion of the in-range check, the following conditions were likely:
Autopilot heading switch − HDG SEL
Captain and FO MD-41 − NAV
Autopilot on GPS − deselected
Captain and FO HSI
Course selector 347°
Heading bug ~024°
Captain and FO flight director − AUTO APP
Captain and FO APD flight director − amber VOR/LOC
ADF no. 1 − RB NDB 350
ADF no. 2 − RB NDB 350
2.6.2. VOR/LOC mode selection after turn (scenario 1)
For this scenario, the following additional conditions were likely upon completion of the in-range check:
Autopilot − MAN mode
Captain and FO APD autopilot − lights not illuminated
Given the above conditions, the following sequence should have occurred. As the aircraft approached the localizer, the track bar on the HSI would move inward from the right side of the instrument. The pilot would need to turn the HSI heading selector knob to rotate the heading bug to the desired new heading (347°). The autopilot would then turn the aircraft to the selected heading. Once established inbound on final approach, the pilot would select VOR/LOC on the autopilot mode control panel (MCP). The approach progress display (APD) autopilot VOR/LOC light would illuminate green when LOC is captured. The flight director display would initially show a left-turn-required indication and then wings-level indication once rolled out on the localizer. The APD flight director VOR/LOC light would change to green upon localizer capture at about 2.5° from the localizer, and the glideslope light would remain amber.
Simulator testing showed that use of VOR/LOC mode resulted in tracking or converging with the localizer. However, radar data show that the aircraft steadily diverged from the localizer, indicating VOR/LOC mode was not selected following the turn. Therefore, this method was not used.
2.6.3. VOR/LOC mode selection before turn (scenario 2)
For this scenario, the following additional conditions were likely upon completion of the in-range check:
Autopilot − VOR/LOC mode
Captain and FO APD autopilot − amber VOR/LOC light
Given the above conditions, the following sequence should have occurred. As the aircraft approached the localizer, the track bar on the HSI would move inward from the right side of the instrument toward the centre. The autopilot submode becomes VOR/LOC capture, and would initiate the turn to intercept the localizer (regardless of the heading bug setting on the HSI) when the course deviation bar indicated about 2 dots from the localizer centreline. The APD autopilot VOR/LOC lights would change to green. The heading switch would return to HDG HOLD. In AUTO APP, both flight directors would initially be commanding wings-level to fly the selected heading on the HSI. At about 2.5° from the localizer, the flight directors would change to capture mode, the command bars would command a left turn, and the APD flight director VOR/LOC lights would change to green while the glideslope light would illuminate amber.
Between 2 dots and 1 dot from the localizer centreline, when the cross-beam rate drops to less than 2 millivolts (mV) per second and the bank angle is less than 6°, the autopilot submode should switch to VOR/LOC on course and the APD autopilot VOR/LOC lights would remain green. The flight director command bars would change from commanding a left turn to commanding a return to wings-level once rolled out on the localizer. The pilot would rotate the heading bug to align with the anticipated heading for rolling out of the turn and readjust the bug once the aircraft had rolled wings-level. The captain's HSI heading bug was found set at 330°.
The autopilot should now track the localizer toward the runway. As the autopilot and flight directors capture the glideslope, the APD autopilot and flight director VOR/LOC lights would remain green, and the APD flight director glideslope light would change to green. The pilot then uses CWS to make autopilot pitch adjustments to maintain the glideslope. Assuming the aircraft tracks the localizer and glideslope, it should reach the decision height 200 feet above the touchdown zone, approximately ½ mile from the runway threshold.
When the autopilot is operating in VOR/LOC mode, the roll channel is in low detent before localizer on course submode, and in high detent after localizer on course submode. Exceeding high detent in roll causes the autopilot to revert to MAN mode. Simulator testing showed that the autopilot could be tripped from VOR/LOC to MAN by putting force on the control wheel in excess of the applicable detent force without inducing any roll.
In MAN mode, the autopilot responds to pilot CWS roll control inputs. The heading switch is used to engage the following roll submodes: HDG HOLD, HDG SEL and HDG OFF. With the heading switch in HDG SEL, the autopilot uses the selected heading data from the HDG bug on the captain's HSI. In HDG SEL, the autopilot roll channel is in high detent, and the switch will trip to the centre (HDG HOLD) position if the roll high-detent force is exceeded.
The curve smoothness of the roll angle plot between points A and E in Figure 14 is consistent with a turn initiated and executed by the autopilot. Control wheel movements made by the pilot would result in a jagged curve for the roll angle plot.
Figure 14. Flight data recorder (FDR) plot showing overview of turn at MUSAT
However, if VOR/LOC had been engaged before the turn and remained engaged throughout the turn, the autopilot should have captured and tracked the localizer. Simulator testing showed that use of autopilot VOR/LOC mode resulted in either intercepting and tracking or convergence with the localizer in every case.
Therefore, in this scenario, it is likely that the autopilot reverted from VOR/LOC mode to MAN mode at some point during the turn. This reversion could only have occurred if a force exceeding the applicable detent was applied to the control wheel.
The scenario will be discussed in relation to 2 flight phases:
From in-range check completion until the flight reached the localizer centreline;
After crossing the localizer centreline.
2.6.3.1. In-range check to localizer centreline
While the aircraft was greater than 2 dots from the localizer (VOR/LOC armed but not yet captured), the autopilot roll channel would be in high detent, because the heading switch was set to HDG SEL.
Once the aircraft was about 2 dots from the localizer, the autopilot would switch to VOR/LOC capture submode, and the heading switch would revert from HDG SEL to HDG HOLD. The autopilot roll channel would switch to low detent because of the HDG HOLD mode. If the low detent force was exceeded, the autopilot mode selector switch would revert from VOR/LOC to MAN.
The aircraft commenced the turn from a true heading of 039° (Figure 14, point A), and crossed the localizer centreline at 1638:32 (point C), rolling left through a true heading of 015°. If the low detent force was exceeded before crossing the centreline, and if the aircraft had less than 5° bank, the autopilot would roll wings-level and maintain a steady heading between 015°T and 039°T, causing the aircraft to track to the northeast. If the aircraft had greater than 5° bank, the autopilot would maintain that bank angle until further inputs were made. However, the radar and FDR data show that the aircraft did neither of these things. Additionally, the FDR shows that there were no control wheel inputs made until after the flight crossed the localizer centreline and the aircraft had rolled almost wings-level.
Therefore, it is unlikely that either the detent force was exceeded or that the autopilot reverted from VOR/LOC mode to MAN during the turn before crossing the localizer centreline.
2.6.3.2. Localizer centreline to roll-out on final
The autopilot remained engaged throughout the approach. Tracking toward MUSAT, before the turn onto final approach, the autopilot would have initially been in VOR/LOC armed mode, with the heading switch in HDG SEL.
FDR data for control wheel movement and roll attitude show that the left turn began at A (Figure 14). FDR data during the turn (A to G) will be discussed in this section. FDR data for the period following the turn (G to H) will be discussed in section 2.8.
The control wheel position plot from A to B is consistent with autopilot initiation of the turn as the aircraft reached 2 dots left of the localizer at A and the autopilot switched from VOR/LOC armed to capture. At this time, the heading switch would change from HDG SEL to HDG HOLD, and the APD autopilot VOR/LOC lights would be illuminated green. The turn begins with a smooth steep rise as the autopilot began the turn by rolling the aircraft to the left. The roll rate increased from 0 to a peak of 5° per second, which was coincident with the control wheel movement peak at B.
The control wheel position plot from B to C is also consistent with autopilot operation. It begins with a steep decline as the autopilot sensed the need to reduce roll rate as the maximum bank angle limit of 25° was approaching. At C, the bank angle peaked at 24° left and the control wheel returned to the neutral position. This point occurred about 2 seconds after the aircraft crossed the localizer centreline.
The control wheel position plot from C to D is also consistent with autopilot operation. As the autopilot sensed the need to begin rolling out of the left turn at C, the control wheel continued to move from neutral to the right. The right control-wheel deflection peaked at D, at which point the aircraft was about 1 dot right of the localizer.
The control wheel position plot from D to E is also consistent with autopilot operation. At D, the autopilot sensed the need to begin reducing the right roll rate, and the control wheel began returning toward the neutral position.
The autopilot was likely still in VOR/LOC capture submode, and had not yet switched to VOR/LOC on course submode, because between D and E:
The bank angle was greater than 6° until 1638:47, about 2 seconds before E; and
The cross-beam rate would have been greater than 2 mV per second, because the aircraft was about 1 dot right of the localizer and diverging.
Because the autopilot was still in VOR/LOC capture submode, the autopilot roll channel would have still been operating at the low detent (4 pounds).
From A to E, the flight director command bars would have been commanding turns to coincide with the turns made by the autopilot.
The control wheel position plot from E to F is not consistent with autopilot operation. Unlike the smooth movement of the control wheel from A to E, the data plots show several abrupt control wheel movements commencing at E and ending at F. It is likely that these movements were the result of manual CWS inputs by the captain. It is likely that the control wheel input at E exceeded the autopilot roll channel low-detent force, causing the autopilot to revert from VOR/LOC to MAN mode.
At E, the flight directors should still have been in AUTO APP, with the APD green VOR/LOC and amber glideslope lights illuminated. The autopilot mode reversion would not have affected the flight directors. As the autopilot (MAN and HDG HOLD mode) rolled the aircraft wings-level, both flight directors should have commanded a left turn because the intercept angle back to the localizer was insufficient.
The control wheel input at E occurred as the aircraft was turning left through a recorded heading of 334° with 5° of left bank (1638:49). When the control wheel input ceased, the bank angle was 2°. In MAN mode and HDG HOLD, with less than 5° bank, the autopilot should have rolled wings-level and maintained a steady heading once wings-level. The roll and heading data for F to G show that the aircraft generally maintained a wings-level attitude.
At F, the aircraft was approximately 1.5 dots right of the localizer. Had the autopilot remained in VOR/LOC in localizer capture submode, the aircraft should have continued rolling further to the left, to a heading that would provide a suitable intercept angle back to the localizer from the right side. Once the aircraft returned to the localizer, the aircraft should then have turned slightly back to the right, to a heading that would maintain the localizer centreline (Figure 15).
Figure 15. Example of VOR/LOC localizer capture (scale represents miles from the threshold)
The FDR data show that the CWS roll inputs ceased at 1638:53. At this time, the roll attitude was 1° left bank, and recorded heading was 332°. The aircraft continued rolling, and stabilized at 1° right bank at 1639:05, with the recorded heading of 330°. The compass error was −16°; therefore, the true heading was 346°. During final approach, the wind would have resulted in 3° of right drift. With the wind drift, the resultant radar track of FAB6560 diverged progressively further to the right of the localizer, as shown in Figure 15.
Because the aircraft did not turn to the left back toward the localizer, the autopilot could not have been in VOR/LOC mode.
The control wheel position remained unchanged from F until another right input at G. The heading and roll information between F and G is consistent with operation of the autopilot in MAN and HDG HOLD.
2.6.3.3. Awareness of unintentional autopilot mode change
Visual indications in the cockpit of the mode reversion would be the autopilot MCP mode selector switch rotating from VOR/LOC to MAN, and the green VOR/LOC lights on the captain and FO APD autopilot columns extinguishing.
The mode selector switch makes a clicking sound when moving from VOR/LOC to MAN. However, given the ambient noise level of the cockpit in flight, and the fact that there was a transmission from CYRB tower at the time (1638:49), it is unlikely that the pilots would notice this sound.
The mode selector switch would have rotated counter-clockwise from 12 o'clock to about 11 o'clock during the mode change. It is unlikely that the pilots would detect this change after it had occurred.
While in VOR/LOC capture submode, the APD autopilot VOR/LOC light should be illuminated green. When the mode change occurred, the green light should have extinguished. However, the APD flight director green VOR/LOC and amber glideslope lights should remain illuminated. It is unlikely that the pilots would detect the absence of this light, especially in the presence of other illuminated lights on the APD. There was no recorded discussion between the pilots regarding any of these indications. Therefore, it is likely that the crew did not detect the autopilot mode change.
2.6.4. Summary of turn analysis
At 1638:50, as FAB6560 was rolling out of the turn onto final approach to the right of the localizer, the captain likely made a control wheel roll input that caused the autopilot to revert from VOR/LOC capture to MAN and HDG HOLD mode.
Once the autopilot was in HDG HOLD mode, the autopilot would have rolled the aircraft to a wings-level attitude and maintained wings-level unless further CWS inputs were made by the pilot flying (PF). FDR data show that the flight rolled approximately wings-level at 1639:05, with a recorded heading of 330°. This heading would also have been displayed on the captain's HSI.
As shown in Figure 16, the indicated heading of 330° would have given the captain the perception that he had a 17° intercept angle to return to the localizer centreline track of 347°.
The no. 1 compass heading is displayed on the FO's HSI. Because there was no recorded discussion of the heading comparator light, the no. 1 compass should have been within ±8° of the no. 2 compass. Therefore, the heading displayed on the FO's HSI should have been within ±8° of the captain's heading. Consequently, the intercept angle on the FO's HSI should have been as little as 9° and as much as 25°.
The HSI is the primary navigational instrument for both pilots. The angular relationship between heading and localizer (Figure 16) would have been a powerful visual confirmation to both pilots that the intercept angle was satisfactory, and that it should return the aircraft to the localizer centreline. However, due to a −16° compass error at this point in the flight, the aircraft's true heading was 346°, as shown in Figure 17. With 3° of wind drift to the right, the resultant aircraft track (349°T) diverged further to the right of the localizer.
With a 17° intercept, the aircraft should have tracked back toward the localizer centreline. This correction would be depicted on both HSIs by the inward movement of the course deviation bar. However, because of the compass error, autopilot mode, and wind drift, the aircraft track diverged further to the right of the localizer. This divergence would have been depicted on both HSIs by the continued outward movement of the course deviation bar.
The track divergence was incongruent with the perceived intercept angle and the pilots' expectation of regaining track. This incongruency would have negatively affected the pilots' situational awareness and increased their workload as they attempted to understand and resolve this ambiguity.
2.7. Crew workload and interaction during turn onto final approach
Previous discussion centred on operation of the navigational systems. During the same period, the crew also performed tasks to begin configuring the aircraft for landing.
When the captain called for flaps 1 at 1637:25, the aircraft was descending through 4500 feet at 225 KIAS, heading toward MUSAT (Appendix D). The captain was likely aware that the aircraft was high and slightly fast, and did not delay in taking action to prepare it for final approach.
At 1637:42, the captain called for flaps 5 and the landing checklist. The initial portion of the landing checklist was completed in an expeditious but unhurried manner, and at 1638:05, the FO indicated that the checklist was holding at the gear and flaps. At 1638:20, the FO called localizer alive, and at 1638:22, the flight began the turn onto final approach.
During the period of 1638:19 to 1638:56, the normal activity for the captain would have been monitoring the autopilot as it executed the turn onto final approach, and also directing the FO to begin configuring the aircraft for landing. The FO executed several tasks during this same period. He was monitoring aircraft position, as evidenced by his statements regarding localizer and glideslope alive; he was communicating with tower; and he was reconfiguring the aircraft in response to the captain's gear-down and flaps-15 calls.
The captain's call for landing gear occurred just after the FO's 10-mile call to tower. The FO was occupied with landing gear extension, and he missed the tower instruction to report 3 miles final. The captain then called for flaps 15, and the FO would have had to make the flap lever movement before requesting tower to repeat the transmission. The FO then confirmed that the landing gear was down, received and acknowledged the 3-mile-final instruction retransmitted from tower, and confirmed that the flaps were set at 15.
The sequence of events indicates that the captain likely perceived the need to continue configuring the aircraft as a higher priority than the FO's communication with tower. This perception is consistent with generally accepted airmanship principles (task hierarchy of aviate, navigate, communicate).
However, the effect of this sequence was to increase the FO's workload during this 37-second period. Completion of these tasks required making 7 verbal statements, as well as monitoring instruments, and moving landing gear and flap levers. In addition to the verbal and physical actions involved, the tasks also required cognitive effort to perceive and process information. This period involved intense workload for the FO.
To avoid having the aircraft reach the undesired state of full localizer deflection, the SOP required the pilot not flying (PNF) to call “Localizer” when the deviation was 1 dot or greater. The required response from the PF was “Correcting.” However, as FAB6560 was transiting through 1 dot right at 1638:43, the captain had just called for flaps 15, and the FO would have been reaching for and moving the flap lever. A “localizer” call was not made at 1 dot of deviation because either the FO did not observe the localizer deviation or he prioritized it below the configuration changes and radio calls.
2.8. Completion of turn and continuation of approach
2.8.1. Aircraft state at completion of turn
At 1639:05, the aircraft rolled out of the turn 1½ dots right of the localizer and 1½ dots above the glideslope at 3100 feet above sea level (asl). Configuration was landing gear down and flaps 15, with 168 KIAS. The autopilot mode was likely MAN with HDG HOLD.
2.8.2. Initial divergence from localizer
2.8.2.1. Flight data recorder data
At 1639:18 (line G of Figure 14), a control wheel movement to the right occurred. This movement is consistent with a manual CWS roll input by the PF rather than a roll input from the autopilot.
When the CWS input ceased, the control wheel returned to the neutral position, and the aircraft rolled wings-level. The remaining interval between G and H shows the control wheel gradually moving from neutral to 4° right, and then back to 2° right at H. Roll angle, roll rate, and heading during this period indicate that the aircraft was wings-level, despite the control wheel angle. Once again, this information is consistent with the autopilot operating in MAN and HDG HOLD.
At H, another control wheel movement occurred, this time initially to the left. The movement peaked at 10° wheel-left, and then changed direction to the right, through the neutral position to 6° wheel-right. These movements are consistent with manual CWS roll inputs by the PF.
On releasing the wheel pressure at 1639:39, the autopilot mode almost certainly returned to HDG HOLD. The FDR data show that the control wheel slowly moved from 6° wheel-right to neutral at 1639:50. The roll data lag the wheel position data slightly, with the aircraft reaching wings-level at 1640:07. The heading data match the roll data, with the recorded heading stabilizing at about 330°.
2.8.2.2. Crew mental models following turn onto final approach
From 1639:13 to 1639:30 (Appendix A), the FO made 5 statements regarding the aircraft's progressive divergence to the right of the desired track, indicating that he was closely monitoring the aircraft position. The captain acknowledged the FO's initial statement. During this period, at 1639:23, FAB6560 reached a position coincident with 2 dots right of the localizer and still 1½ dots above the glideslope. At 1639:24.2, the FO made a statement referring to full deflection from the localizer.
At 1639:33 and 1639:36, the captain made 2 statements that suggest that he was satisfied that the autopilot was tracking properly. These statements coincided with the control wheel movement at H discussed in the section above.
The captain likely believed that the autopilot mode was still VOR/LOC, because they had entered the turn in VOR/LOC and had rolled out of the turn with a reasonable re-intercept angle following the initial localizer overshoot. The captain's statements and the control wheel movement at H suggest that the captain was likely performing a test to verify that the autopilot mode agreed with his mental model.
The captain's mental model was likely that the autopilot would re-intercept the localizer from the right and a landing would follow. However, the FO's mental model was likely that the aircraft was still diverging to the right of the desired track, despite an apparent intercept angle. This difference in mental models is the first indication that the pilots' shared situational awareness was breaking down.
The flight directors likely switched from AUTO APP intercept to AUTO APP capture at point A at 1638:21 as the turn began. At point E, the autopilot submode changed from VOR/LOC capture to MAN and HDG HOLD. However, the flight directors would not have been affected by the control wheel movements, and would have remained in AUTO APP. Consequently, the command bars would have been commanding a left turn toward the localizer, the APD flight director VOR/LOC lights would have remained green, and the glideslope lights would have remained amber.
If the LOC deviation signal exceeds the limit (2.5° for the localizer) during the 90 seconds after LOC capture, the flight director APD VOR/LOC annunciator amber light will illuminate and the green light will extinguish, as the flight director reverts from LOC capture to LOC intercept.
At 1639:51, 90 seconds after the flight directors switched to AUTO APP capture at A, the aircraft was greater than 2.5° off the localizer centreline. It is likely that both flight directors reverted to AUTO APP intercept mode. The command bars would then provide guidance to fly to and maintain the selected heading on the HSI.
The captain's HSI heading bug was found at 330°. At 1639:51, when the 90-second period elapsed, the recorded heading was 329°. Assuming that the captain's heading bug was set at 330°, there would be only 1° difference between indicated heading and selected heading, and any flight director roll command would be almost imperceptible. Therefore, it is likely that the captain's flight director was commanding wings-level or almost wings-level after reverting to AUTO APP intercept mode. This state would be a powerful reinforcement for the captain that the apparent intercept angle back to the localizer was sufficient. However, the HSI course deviation bar would have remained at its maximum deflection, 2 dots, despite further deviations off the localizer beyond 2 dots.
Indications available to the captain that a flight director mode change had occurred would have been a change in command bar position from commanding a left turn to commanding wings-level, and the APD flight director VOR/LOC light changing from green to amber. The command bars are in the attitude director indicator (ADI), and the APD lights are above the altimeter, about 6 inches to the right of the ADI.
If these changes occurred while the captain's attention was elsewhere, it would be more difficult to detect the changed state of the instruments upon returning his attention to them. Therefore, it is possible that the captain did not detect the flight director mode change.
If the mode change had not occurred and the captain's command bars continued to command a left turn to the localizer, it is extremely unlikely that the captain would ignore this cue without commenting on it. Given the FO's repeated statements about multiple indications of deviation from the localizer, if his flight director command bars had been commanding a left turn, it is almost certain that he would have mentioned this. There was no discussion between the pilots about command bars or APD lights at any time during the approach, suggesting that neither pilot was aware that the mode change had occurred.
The FO continued to voice his concern that they were progressively diverging further to the right. He also indicated that a second nav-aid, the GPS, confirmed that they were right of the desired track. The flight director reversion likely occurred about the same time the FO mentioned the GPS. It is possible that the FO was looking at the GPS, which was located on the centre console near his left knee. If the changes to the flight director command bars and APD lights occurred while the FO's attention was on the GPS, it would be more difficult to detect the changed state of the instruments upon returning his attention to them. Therefore, it is possible that the FO did not detect the flight director mode change.
The FO's HSI heading bug was not found, and its setting is unknown. Assuming that the FO also set his heading bug to the heading that the aircraft rolled out on, his flight director, once in AUTO APP intercept mode, would also be commanding wings-level or almost wings-level. The FO's statement at 1639:57 suggests that his flight director was in AUTO APP, but he did not mention the APD lights. It is likely that the FO was referring to his flight director mode selector switch being in the AUTO APP position. Regardless of whether the FO was aware of the flight director mode change, his understanding of the track deviation was based on the HSI course displacement bar and the GPS. These 2 indicators supported his mental model that the aircraft was right of track and they needed to go around, as evidenced by his repeated statements to that effect.
From 1639:51 until 1641:05, the recorded heading was within the range of 329° to 332°. With the captain's HSI heading bug set at 330°, his flight director command bars would have been commanding wings-level.
The pilots likely did not detect that the flight directors had reverted to AUTO APP intercept mode. In this mode, the flight director command bars provided roll guidance to the selected heading (wings-level command) rather than to the localizer (left-turn command). The apparent agreement between the HSI (right of track) and the flight director (wings-level) likely assured the captain that the intercept angle was sufficient to return the aircraft to the selected course. The FO likely put more weight on the positional information of the track bar and GPS. This situation represented a divergence in mental models that degraded the crew's ability to resolve the navigational issues.
2.8.3. Full localizer deflection
The HSIs had likely been indicating full-scale localizer deflection after 1639:23. During the subsequent 44-second period, the pilots were engaged in a discussion of aircraft position. At 1639:24.2, the FO stated, “Now we're through it.” This statement was likely an attempt to alert the captain to full-scale deflection. Throughout the discussion, the FO continued to monitor aircraft position; at 1640:07, the FO stated that they had full deflection (Appendix D). The utterance was phrased as a question seeking confirmation from the captain. At this time, the aircraft was 4.7 nm from the runway threshold and about 2800 feet right of the localizer, well in excess of 2 dots.
Full-scale deflection is an undesired aircraft state because safety margins can no longer be assured. Because the HSI is limited to displaying a maximum of 2 dots deflection, any further displacement beyond 2 dots would not be apparent to the pilots. As described in section 1.17.2.8.2, pilots are taught during initial instrument training that full-scale deflection of the localizer requires a missed approach. The AOM provided a call to be made whenever the localizer course deviation exceeded 1 dot from the centre, but did not provide a standard call and response for full-scale deflection.
The captain's response, at 1640:08, acknowledged that they were at full deflection, and indicated that he could not reconcile the FO's statement about full deflection with his own mental model that they would re-intercept the localizer from the right.
The FO's statement, at 1640:11, indicates that he was certain that the aircraft was not on the localizer. The captain's response, at 1640:14, indicates that he was still convinced that the autopilot was in VOR/LOC mode and had captured the localizer, and he confirmed that they had selected the correct ILS frequency.
At 1640:17, the FO voiced his disagreement regarding localizer capture, and mentioned the hill to the right of the airport. This communication indicates that the FO was aware that the autopilot had not captured the localizer, and understood the hill to be a hazard.
At 1640:23, the FO once again stated that the GPS showed right of track.
The crew did not maintain a shared situational awareness. As the approach continued, the pilots did not effectively communicate their respective perception, understanding, and future projection of the aircraft state.
2.8.4. Go-around suggestion
During the turn onto final approach, the FO was occupied with configuration and communications tasks at the time the aircraft passed 1 dot right of the localizer. As a consequence, the “localizer” call did not occur.
After the aircraft rolled out of the turn, the FO identified that the aircraft was to the right of the localizer and was diverging. Although the FO did not use the required phraseology of “localizer” to alert the captain to the deviation, he did repeatedly attempt to point out the problem, as he was required to do by the checklist philosophy described in AOM Volume 1, page 03.20.2.Footnote 158 In doing so, he referred to both the localizer and the RNAV RWY 35 TRUE final approach track.
This communication occurred during an 80-second (1639:13 to 1640:33) discussion between the pilots that focused exclusively on aircraft navigation. The FO's statements did not influence the captain's actions, likely because they identified parameters rather than consequences and required action. An example of language that identifies consequences and required action would be: “We are at risk of hitting the hill; we must go around.”
The pilots shifted into solving the navigational problem and delayed configuring the aircraft for landing. This problem solving was an additional task, not normally associated with this critical phase of flight, which escalated the workload without resolving the problem.
Complicating matters, each pilot was trying to solve a different problem. The captain was trying to solve the problem of intercepting the localizer and landing the aircraft, and the FO was trying to solve the problem of getting the captain to change his course of action and initiate a go-around. This meant that neither pilot was effectively communicating to resolve the situation.
The discussion had not reassured the FO about the trajectory of the aircraft, and did not result in the captain changing his course of action. Consequently, at 1640:30, the FO informally suggested that they do a go-around and then talk the anomaly through.
However, the statement was voiced as an opinion, and did not include the phrase “go-around”. This statement indicates that the FO's mental model was now that the aircraft was full-scale deflection from the localizer and a go-around was required. The suggestion was not sufficiently assertive at a time when an escalation of communication was needed, and did not convince the captain to discontinue the approach.
There are several possible reasons why the FO's go-around suggestion may have been phrased as it was. Full-scale localizer deflection is seldom seen in contemporary air transport operations, and it is possible that the FO had not experienced full-scale deflection since his initial instrument flying training. Additionally, while the AOM specified a callout to identify a deviation in excess of 1 dot, there was no guidance as to what phrases to use or what action must be taken at full deflection. Go-around is a manoeuvre likely seen more frequently during simulator training than line operations, and is typically initiated at the missed approach point, rather than several miles before the missed approach point.
For an ILS approach, the AOM specifies phrases to be used by the PNF and PF at decision heightFootnote 159 (see section 1.17.2.9.1 in this report). The PNF standard callouts are “Minimums, runway in sight” or “Minimums, no contact.” The phrases do not refer to go-around, but instead alert the PF to the aircraft state and require the PF to make a decision. Based on the aircraft state information provided by the PNF, the PF indicates that he is either landing or initiating a go-around. In the event of a go-around decision, the PF states “Go-around thrust, flap 15.” The go-around procedure (reproduced in section 1.17.2.9.1, Figure 7) specifies a slightly different phrase for the PF: “Go around, flaps 15.”Footnote 160
The SOP guidance for the PNF was only to provide information to the PF. The PF then makes the decision whether to go around, and initiates the go-around by stating an executive command: “Go around, flaps 15.”
In the absence of standard phraseology applicable to his current situation, the FO had to improvise his go-around suggestion.
2.8.5. Approach continuation following full deflection
A go-around at full deflection is a defence against the threat of collision with terrain outside the ILS protected area.
At 1640:33, the captain acknowledged the FO's suggestion, and indicated that he would continue the approach. The captain's acknowledgement of the FO's go-around suggestion indicates that the captain had heard the suggestion.
Subsequent paragraphs describe the captain's likely mental model and explain why it made sense to him to continue the approach given his perception and understanding of the situation, despite the communications from the FO.
The captain likely thought that he was controlling the aircraft through the autopilot and that the autopilot was navigating back to the localizer and onto the glideslope. Concurrently, he was likely attempting to reconcile his mental model with the movement and position of the course deviation bar on his HSI. These tasks were a high workload for the captain at this time.
There are a number of environmental cues available in the cockpit to provide information to the pilots about autopilot approach mode progress. As discussed in section 2.6.3.3, the crew likely did not perceive these cues or correlate them with the autopilot mode change from VOR/LOC to MAN.
At this time, the captain's likely desired course of action was to maintain the current heading to re-intercept the localizer and ultimately to land at CYRB. His desired course of action was influenced by the following:
The autopilot mode likely switched to MAN and HDG HOLD during the roll-out from the turn, and the captain still believed that it was in VOR/LOC and that it was intercepting and would track the localizer.
The current erroneous heading resulted in an apparent intercept angle when, in fact, the true heading was divergent. This powerful supporting cue was displayed directly in front of him on the HSI.
The captain's flight director was likely in AUTO APP intercept mode, and would have been commanding wings-level.
The captain had previous successful experiences landing in poor weather conditions.
The captain may have expected to break out of the cloud base and acquire visual reference at or below 700 feet agl. This expectation of acquiring visual reference would support the captain's desired course of action to land the aircraft. (The crew were aware that the weather at CYRB had fluctuated between 200 feet agl and ½ sm at 1500 and 700 feet agl and 10 sm at 1600.)
Go-around is typically initiated at the missed approach point rather than several miles before the missed approach point.
Increased stress levels may result in attentional narrowing (section 1.17.8.3), and can adversely impact a pilot's ability to perceive and evaluate cues from the environment. Attentional narrowing can lead to confirmation bias, which causes people to seek out cues that support the desired course of action, to the possible exclusion of critical cues that may support an alternate, less desirable hypothesis.
The FO's suggestion that they do a go-around represents the alternate hypothesis. There were multiple cues supporting this hypothesis:
Course deviation bar movement to the left to full deflection,
GPS indications, and
Multiple statements from the FO.
Given the captain's workload, he was likely experiencing increased stress. This stress would have made him susceptible to the influence of confirmation bias and attentional narrowing. This susceptibility would make it difficult for the captain to perceive and evaluate other cues such as those offered by the FO and by the course deviation bar and GPS. Additionally, as the PF, the captain's primary role was controlling the aircraft, which diminished the time available to him to maintain an overview of the situation and formulate a strategy.
It is likely that the captain did not fully comprehend information that indicated that his original plan was no longer viable. Although he likely understood the FO's go-around suggestion, the suggestion conflicted with the captain's plan to complete the approach and land. Therefore, the FO's suggestion would have been less desirable to the captain.
The captain's response to the FO commenced immediately after the FO finished speaking; the captain did not take any time to evaluate the FO's suggestion. The absence of any evaluation of the FO's suggestion is indicative of the captain being affected by plan continuation bias (section 1.18.1). The captain likely deferred any decision to go around, and defaulted to his original plan to re-intercept the localizer and land.
The fundamental disagreement between a suggestion to go around and continuation of the approach is a strong indicator of further breakdown in the pilots' shared situational awareness. The consequence of this further breakdown was that it compromised the pilots' ability to communicate effectively, and it became an additional problem that the crew needed to solve.
At 1640:35, the FO acknowledged the captain's statement and the approach was continued.
2.8.6. Unstable approach and continuation of approach
The SOPs required the PNF to make a callout (position, altitude, altimeter, and instrument cross-check) at the final approach fix (FAF) and a callout for parameters exceeding tolerances while inside the FAF (sections 1.17.2.8.3 and 1.17.2.8.5). The FO did not make either the callout as FAB6560 passed abeam POKAN FAF or a callout for excessive airspeed.
The absence of these callouts is indicative of the FO's high workload inside the FAF, as well as of his prioritization, in that he was almost certainly more concerned with getting the captain to do a go-around than with making corrections to individual approach parameters.
The company's stable approach criteria were described in the First Air Flight Operations Manual (FOM)Footnote 161 (see section 1.17.2.8.4 in this report). Although the FOM provided policy guidance, there was no complementary procedural guidance in the AOM describing how the policy would be implemented, similar to standard phraseology and actions specified for other events such as reaching decision height. In the absence of a procedural framework for initiating a go-around in the event of an unstable approach, pilots had to improvise.
The investigation examined how First Air's CYZF-based B737 pilots would, in the role of PNF, advise the PF of an unstable approach and the need to go around. Pilots were aware that no SOPs existed for this situation, and pilot responses varied. Some pilots struggled to answer the question, taking up to 90 seconds to respond to a situation that in the cockpit would require immediate action.
At 1640:41.9, the FO stated, “We're 3 mile final; we're not configged.” The aircraft was on the glideslope at 1140 feet asl (920 feet above airport elevation) with landing gear down and flaps 15. Engine thrust was being reduced to idle, likely because the captain needed to reduce airspeed to enable further configuration changes. Aircraft position was 2.9 nm from the runway threshold, with full-scale localizer deflection on the HSIs.
The altitude threshold below which the company's stable approach policy applied and required an immediate go-around if the approach was not stable was 1000 feet above airport elevation. At this time, the FAB6560 approach was unstable in several parameters:Footnote 162
It was in excess of 2 dots' deviation from the localizer;
Significant changes in heading and pitch were required to correct to proper flight path;
Airspeed was 176 KIAS, VREF + 44 knots;
The aircraft was not configured for landing; and
The landing checklist was not complete.
Given the FO's repeated concerns voiced earlier during the approach, it is almost certain that, in advising the captain that they were 3 miles final and not configured, his intended message was “The approach is unstable and we must go around.”
Procedures for clear and consistent communications are intended to prevent confusion between the pilots. In this instance, the FO was providing consistent information to the captain regarding aircraft position and state. However, the “We're 3 mile final; we're not configged” call was immediately followed by the captain's command for selection of flaps 25. This sequence indicates that the message the captain perceived was “We need to configure for landing.” Immediate action to commence a go-around was required, and the FO's communications about the unstable approach were not clear.
The FO had made a previous go-around suggestion using non-standard language, which was ineffective. Similarly, the FO's statement at 3 miles was also ineffective, because it included information only about aircraft position and state. The FO's implication was that a go-around should be initiated, but this was subject to misinterpretation.
At 1640:45, the captain's response to the FO's 3-mile call was to call for flaps 25. This response suggests that the captain likely misinterpreted the FO's statement as a prompt to finish configuring the aircraft for landing rather than understanding the FO's intended message that the approach was unstable and a go-around was necessary.
The captain shifted focus from the track displacement to rapidly configuring the aircraft for landing. This shift further suggests that the captain intended to continue his desired course of action, which was to land at CYRB. It is likely that he was still being affected by attentional narrowing and plan continuation bias.
The following paragraphs discuss the crew's likely mental models and explain why it made sense to the captain to continue the approach given his perception and understanding of the situation.
By now, the captain's workload had increased further. He was still the PF and was still working to get on course while he integrated new information into his mental model. Now he had the additional task of rapidly configuring the aircraft in time to land. Therefore, it is likely that the captain was even more susceptible to plan continuation bias at this point than he had been only 12 seconds earlier.
Given the captain's workload and mental model, it is likely that only clear and unambiguous information would have succeeded in changing his understanding of the situation and his course of action. As discussed in section 2.8.5, the captain's desired course of action was supported by the following:
His belief that the autopilot was in VOR/LOC with an intercept to the localizer;
The apparent intercept angle displayed on the HSI;
Flight director command bars commanding wings-level;
Previous successful experiences in landing after conducting an instrument approach;
Expectation to acquire visual reference;
The fact that a go-around is typically initiated at the missed approach point.
The FO's desired course of action, a go-around, was supported by:
Movement of the course deviation bar to full deflection;
Increase in track divergence despite the apparent intercept angle displayed on the HSI;
GPS indications;
Unstable approach; and
Terrain hazard.
As before, it is likely that the captain did not fully comprehend that his plan to complete the approach and landing was no longer viable. The captain's response to the FO commenced several seconds after the FO finished speaking, indicating that the captain had likely taken time to evaluate the FO's “3 mile” statement. The captain likely did not consider a go-around, but again defaulted to his plan to land at CYRB. His priority now became configuring the aircraft, and the navigational problem likely became a lower priority.
The ineffective statement by the FO and the misunderstanding by the captain are indicators of further breakdown in the pilots' shared situational awareness. The captain's mental model was likely that the approach and landing could be salvaged, and the FO's mental model was almost certainly that there was significant risk to the safety of flight and that a go-around was required. These divergent mental models compromised the pilots' ability to communicate and work together effectively to resolve the progressively deteriorating situation.
The FO's statement did not explicitly identify the unstable approach, or include any go-around command or directive. Consequently, the captain did not interpret the FO's “3 mile final and not configged” statement as guidance to initiate a go-around, but instead interpreted it as an advisory that they needed to expedite configuration of the aircraft for landing. The captain continued the approach and called for additional steps to configure the aircraft.
2.8.7. Final configuration for landing
At 1640:45.9, the captain instructed the FO to select flaps 25 (Figure 18), and the FO did so. The SOPs required the FO to call out confirmation that the requested flap selection was made, and also a confirmation that the flaps had reached the selected position. However, the FO did not make either of these calls for the flaps 25 selection.
At 1640:49.1, the FO advised the captain that they were also experiencing full deflection on the GPS and that they needed to go left. This was yet another attempt to influence the captain's course of action, and suggests that the FO had momentarily stopped trying to convince the captain to initiate a go-around and was instead attempting to get the aircraft back on the localizer, where the risk of terrain would be eliminated.
At 1640:54.3, the captain responded that he could not go left. The indicated heading at the time was 330°, which provided an apparent 17° intercept angle back to the localizer. Given that the flight was only 3 miles from the runway, it is likely that the captain was reluctant to turn further left and increase the intercept angle, which could have resulted in overshooting through the localizer to the left if the apparent intercept angle had been correct. Additionally, in AUTO APP intercept mode, his flight director was likely commanding wings-level to maintain the heading selected with the heading bug.
During the period of 1640:56 to 1641:08, the FO made several statements regarding aircraft position and avionics mode. The captain called for flaps 30 and also acknowledged the FO's statements, but took no action based on them. The SOPs required the FO to call out confirmation that the requested flap selection was made, and also a confirmation that the flaps had reached the selected position. However, the FO did not make either of these calls for the flaps 30 selection. At 1641:08.3, the FO started to make a suggestion, and the captain interrupted the statement with a call for flaps 40.
This discussion was fast-paced and concurrent with configuring the aircraft, and did not help to resolve the navigational or avionics issues. The captain interrupted the FO's statements with the flaps 30 and 40 calls, which created a dynamic between them of haste to complete configuration taking precedence over the FO's concerns. The FO's statement was likely intended to be another suggestion to do a go-around, but was not completed because of the interruption.
The last 2 items of the landing checklist require both the PNF and PF to verify landing gear and flap indications. At 1641:10.1, the FO stated that the gear was down with 3 green lights, as specified in the checklist, but did not mention the flap position. The captain responded with an acknowledgement of the flaps at 40 with a green light, but did not verify the landing gear position. After all actions have been completed and verified, the PNF is expected to announce to the PF “Landing checklist complete,” but the FO did not do this. Although the landing checklist had not been called complete, the aircraft was in the landing configuration.
The FO did not make 5 required callouts as the final configuration changes occurred. This omission was consistent with task shedding of normal PNF duties during a period of very high workload, to enable completion of other tasks associated with configuring the aircraft, monitoring aircraft position, and attempting to convince the captain to go around. The FO was task-saturated. The consequence of this task saturation was that the FO had less time and cognitive capacity to develop and execute a communication strategy that would result in the captain changing his course of action.
As discussed above, thrust had been reduced to idle at 1640:36, likely because the captain needed to reduce airspeed from 178 KIAS to enable further configuration changes. As the flaps were selected to 25, 30, and 40, pitch angle remained at 2° nose-up. As drag increased, airspeed decreased to 136 KIAS at 1641:11, a 42-knot reduction in 35 seconds. At 1641:05, thrust began increasing from idle and reached 1.5 engine pressure ratio (EPR) at 1641:12. This increase was likely the result of the captain responding to the airspeed reduction. Concurrently, the rate of descent decreased from about 700 feet per minute (fpm) to about 150 fpm, and the aircraft went from being on the glideslope to being in excess of 2 dots above.
The captain's statement at 1640:54.3 that he could not go left occurred between his calls for flaps 25 and flaps 30. At this time, his attention was likely becoming focused on aircraft configuration and airspeed control, to the detriment of other parameters. As indicated by the rate of descent change and ballooning above the glideslope, his attention to flying the ILS approach was negatively affected. This situation is a strong indication that the captain was affected by attentional narrowing.
The captain had maintained the same heading from when the aircraft rolled out of the turn, at 1639:05, until 1640:54 (1 minute and 50 seconds). During this period, the aircraft travelled from 7.9 to 2.3 miles from the threshold, and progressively diverged from the localizer to full-scale deflection on the HSI.
The captain had information available to him indicating that the apparent intercept angle was not working. However, confirmation bias may have degraded his ability either to perceive this information or to integrate it into his mental model.
During this period, the captain was occupied with several simultaneous tasks. He needed to direct the final configuration of the aircraft for landing, reduce and stabilize airspeed, resolve the localizer issue, and regain the glideslope. He also needed to make specified callouts to verify that the configuration was correct. The captain missed at least 1 required callout, and was having difficulty integrating control inputs to correct for multiple parameters simultaneously. This difficulty is indicative of task saturation.
Due to attentional narrowing and task saturation, the captain likely did not have a high-level overview of the situation. This lack of overview compromised his ability to identify and manage risk.
2.8.8. Final portion of approach
From 1641:05 until impact, the FDR data show numerous control wheel movements at the same time as the aircraft was pitching nose-down. These wheel movements were consistent with the captain unintentionally moving the wheel from side to side as he moved the control column forward to correct to the glideslope. Small roll and heading changes occurred during this period that were coincident with the wheel movements. The heading changes are unlikely to have had an appreciable effect on flight director command bars, which likely continued to command wings-level.
At 1641:16, seconds after the final landing configuration was achieved, the aircraft position was approximately 4100 feet right of the localizer centreline, 1.5 nm from the Runway 35T threshold. HSI indications would have been full-scale right localizer and full-scale above glideslope. Airspeed had stabilized at 136 KIAS, and engine thrust was about 1.5 EPR. Altitude was 940 feet asl (720 feet above airport elevation). The aircraft was now near the altitude at which the captain likely expected to break out of the cloud base and acquire visual reference.
A 1641:16, the captain stated that something similar had previously happened to another pilot, and again indicated that he was continuing the approach. It is possible that the captain had misunderstood the recounting of the previous occurrence, or that he did not fully recall the occurrence, in which the crew had done a go-around and resolved the compass/navigational issue at a safe altitude. This comment by the captain did not contribute to the problem solving in the cockpit or alleviate the FO's concerns about the captain's course of action.
The captain's statement indicates that he was likely aware to some extent that there was a problem with the indicated heading and navigational indications. Despite this, he continued the approach, possibly because he expected to soon acquire visual references, as was his experience during Incident One (section 1.17.3.3.2).
The aircraft pitch attitude remained relatively stable (2° nose-up) between 1640:10 and 1641:18, other than a few minor excursions while thrust was decreasing and the aircraft was being configured (Figure 18). These excursions are consistent with autopilot pitch mode OFF, manual pitch CWS, and the autopilot maintaining the last pitch attitude set by the captain (section 2.3).
At 1641:18, the aircraft began pitching nose-down, reaching a pitch attitude of −2° at 1641:32. The captain had likely observed that the rate of descent had flattened and that they had ballooned above the glideslope, and had put forward pressure on the control column in excess of the low detent force. Once the control column pressure became less than the low detent, the autopilot maintained the new pitch attitude of −2°.
From about 1641:19 to 1641:27, FDR data show that the descent rate increased from about 100 fpm to 700 fpm. The nose-down pitch change and increased descent rate indicate that the captain had switched his priorities from configuring and airspeed reduction back to the glideslope and was manoeuvring to re-intercept the glideslope.
At 1641:26.3, the captain made a statement about the glideslope. The FO acknowledged and indicated that it was fully deflected. FDR and radar data show that, at the time, the aircraft was at 880 feet asl and was well above the glideslope and well right of the localizer. Because the aircraft position was so far right of the localizer and so close to the glideslope transmitter, it is possible that cockpit glideslope indications were unreliable.
At 1641:30.8, the FO made a VHF radio transmission to CYRB tower reporting 3 miles final. At this time, the aircraft was 0.9 nm from the runway threshold. The deferment of this call to tower is a further indication of the FO's high workload and task saturation.
At 1641:33, the tower responded with wind information and clearance to land, and at 1641:39, the FO replied. At 16:41:41.1, the FO stated that the aircraft was just over the shoreline. At this time, the aircraft was passing the northern edge of a pond about 0.7 nm to the southeast of Runway 35T. It is likely that the FO had incorrectly identified this visual feature as the coastline along the sea. The FO's statement indicates that he likely had some brief visual contact with the surface, which would have reinforced the captain's expectation of acquiring visual references.
FDR data show that the rate of descent had increased to 1000 fpm by 1641:40, with the airspeed increasing to 152 KIAS. At 1641:43, as the aircraft pitched further nose-down to −5°, the FO uttered an expletive. This was almost certainly an expression of his grave concern regarding the aircraft position and state.
The rate of descent then further increased to 1500 fpm at 1641:46 with the airspeed increasing further to 158 KIAS. Altitude was 530 feet asl (310 feet above airport elevation). The aircraft was abeam the Runway 35T threshold and 4400 feet to the right of the localizer centreline (Figure 19). At this time, the FO called the captain by his first name and again expressed his concern about the situation. This was a change of approach by the FO from providing information about aircraft performance and position to making a personal appeal by using the captain's first name to capture his attention and break his fixation on the glideslope and landing.
Figure 19. Final approach track relative to runway (image: Google Earth, with annotations by TSB)
The captain's fixation on the glideslope is further evidence that he had lost the high-level overview of the situation, and did not perceive or understand the consequences of continuing the approach.
At 1641:47.7, the GPWS generated an aural “sink rate” alert. This alert provided independent and definitive information about an impending hazard, and triggered the FO to instruct the captain to initiate a go-around, first by stating “Go for it”, a non-standard phrase, and then by using the standard phrase “go-around”.
At 1641:49.2, the GPWS generated an aural “minimums…minimums” alert, and at 1641:51.2, the captain called “Go-around thrust.” FDR data show that the aircraft pitched up to +5° and EPR increased to about 1.9, indicating that the captain had initiated a go-around.
The crew initiated a go-around after the GPWS “sink rate” alert occurred, but there was insufficient altitude and time to execute the manoeuvre and avoid collision with terrain.
2.9. Absence of control transfer during final approach
The company’s two-communication rule in the FOMFootnote 163 authorized the FO to assume control of the aircraft and fly it to a safe situation in the event that the pilot flying (PF) became obviously or subtly incapacitated. The captain of FAB6560 was verbally responsive to the FO’s comments and suggestions, and was making control inputs. Therefore, the captain was not obviously incapacitated. However, his persistence in following his course of action despite the FO’s verbal advisories indicates that he was experiencing subtle incapacitation, which was likely due to the stress associated with the deteriorating approach parameters and associated workload.
It is likely that the FO did not recognize the captain’s behaviour as that of subtle incapacitation. If the FO considered the two-communication rule, it is likely that he concluded that the captain was not incapacitated and the rule did not apply.
The FO’s non-application of the two-communication rule highlights a deficiency in the rule, in that the rule relies on the judgment of the PNF to determine whether subtle incapacitation exists. Recognition of subtle incapacitation may take considerable time, and it may not occur at all. Outside of the two-communication rule, there was no guidance provided to address a situation in which the PF is responsive but is not changing an unsafe course of action. This situation presented a unique problem for the FO of FAB6560; that is, how far should he allow the aircraft to deviate before taking over control from the captain?
There is a history of incidents and accidents in which the FO was the PNF and warned of a deteriorating situation, but did not take control when the captain continued an unsafe course of action (section 1.17.8.5). In all of these occurrences, the company had some form of two-communication rule, but the defence failed because the FO did not intervene and take control of the aircraft. Some likely reasons for this failure are difficulty in identifying subtle incapacitation, ambiguity in the wording of the procedure, or inhibitions on the part of FOs to take the drastic measure of taking control from a captain.
At the time of the First Air accident, there was no training or guidance within the company on how an FO would escalate a concern to the point that a go-around or change of control could be commanded. In the absence of policies and procedures, such as PACE (probing, alerting, challenging, and emergency warning), enabling the FO to escalate his concern as well as providing the authority to take control of the aircraft from the captain, the FO was limited to an advisory role. The FO was clearly aware of the increasing risk. The approach had continued beyond 2 points at which a go-around was required: first, when there is full localizer deflection, and second, in an unstable approach below 1000 feet. At both of these points, the FO attempted to communicate the need to go around to the captain. While not as definitively and clearly expressed as they could have been, these attempts are indicators that the FO was continuing his efforts to change the captain’s course of action.
The FO had previously flown as captain on another aircraft type with the company. However, he was new to the B737, and although obviously uncomfortable with the navigational situation, deferred to the captain.
There was no policy specifically authorizing an FO to escalate his role from advisory to taking control, and this FO likely felt inhibited from doing so. The FO made many attempts to communicate his concerns and suggest a go-around, but did not take control of the aircraft from the captain.
This accident and the other 3 occurrences cited (section 1.17.8.5) are indicators that failure of FOs to take control in deteriorating situations will occasionally result in catastrophic consequences in the global fleet of transport aircraft. Without policies and procedures clearly authorizing escalation of intervention to the point of taking aircraft control, some FOs may feel inhibited from doing so.
2.10. Adaptations and First Air B737 standard operating procedures
2.10.1. Adaptations
As discussed in section 1.17.2, there were numerous examples of how the FAB6560 crew deviated from the company’s operating policies and SOPs. Interviews with other CYZF-based B737 pilots revealed that some of the deviations were not unique to the crew of FAB6560. These policy and procedural deviations were adaptations employed by the pilots to gain some perceived benefit. Over time, the adaptations became normalized as the way the pilots operated the aircraft. Some of the adaptations were of a minor nature; however, other adaptations were more likely to have an impact on safety of flight. For example:
Occasionally hand signals or a tap on the control wheel were used to signify the transfer of control.
Approach briefings were commonly abbreviated when flying with familiar crew members or during good weather.
Altitude callouts would be made using non-standard phraseology, with hand signals sometimes used when the radios were in use.
GPS or FMS (flight management system) were sometimes used to transition from en route to final ILS approach.
Pilots were aware of when they would be subject to the company’s direct monitoring methods discussed in section 1.17.4, and could modify their behaviour during these monitoring periods. Additionally, the company had no indirect monitoring methods, such as a functioning flight data monitoring (FDM) program or line operations safety audit (LOSA), at the time of the accident. Consequently, the company was unlikely to detect the presence or persistence of the adaptations.
First Air’s supervisory activities did not detect the SOP adaptations within the CYZF B737 crew base, including the crew of FAB6560. As discussed in earlier sections of this analysis, the consequences of the adaptations on FAB6560 were ineffective intra-crew communication, escalated workload leading to task saturation, and breakdown in shared situational awareness.
2.10.2. Transition to instrument landing system approach
As discussed in section 2.2, one possible interpretation of the FAB6560 captain’s plan to transition from en route to approach was a non-standard method involving use of the GPS to align the aircraft with the localizer on final approach. Consequently, the investigation explored the question of whether this adaptation existed.
Pilot interviews revealed that some First Air B737 pilots used the GPS to turn the aircraft onto ILS final approach and would then switch to VHF NAV once established on the inbound track. Company management considered this practice unacceptable, and some pilots interviewed discouraged its use.
Pilots who did not use this method would make the switch to VHF NAV at distances back from MUSAT, which varied from 1 to 10 miles.
The AOM specifies that the items below the dashed line on the in-range checklist are accomplished after nav-aids and flight directors have been set up, as briefed, for the intended approach. Consequently, the checklist cannot be completed until the NAV switch selection has been made (MD-41 NAV/GPS selection). This requirement relates to order of task completion rather than aircraft position relative to the final approach track.
The varying distance at which the switch to VHF NAV occurred and the use of a non-standard method are both adaptations. One factor likely contributing to development of these adaptations was the absence of information as to where, in relation to the final approach track, the in-range check completion is to be accomplished.
An inherent risk associated with delaying the change to VHF NAV is that the landing check would sometimes be initiated before the in-range check was completed. This sequence introduces the possibility of some checklist items being missed as items are performed out of order. Additionally, depending on the aircraft position and heading at the time of the MD-41 NAV selection, it is possible that the autopilot would not track the localizer because the switch occurred too late and was outside of capture criteria.
If SOPs do not include specific guidance regarding where and how the transition from en route to final approach navigation occurs, pilots will adopt non-standard practices that may introduce a hazard to safe completion of the approach.
2.11. FAB6560 crew resource management
2.11.1. General
As discussed in section 1.17.7.1, crew resource management (CRM) is the effective use of all human, hardware, and information resources available to the flight crew to ensure safe and efficient flight operations. SOPs are an important information resource available to pilots, and provide standardized phraseology and structure for communications to maintain shared situational awareness. Additionally, they provide predetermined solutions to various problems, and assist with workload management and decision making.
2.11.2. Shared situational awareness
In this occurrence, there were deficiencies in both the discrete actions (incomplete approach briefing, altitude callouts, and airspeed callouts) and continuous actions (callouts of changes in aircraft state and flight director / autopilot modes) that were required of the crew to establish and maintain shared situational awareness. Consequently, there was a breakdown in their ability to jointly interpret, problem-solve, and take action on the information available. As they shifted from following established procedures to problem-solving behaviour, their workload increased, and the differences between their individual awareness of the aircraft state and of threats to safe flight posed an additional problem that the crew needed to overcome.
A breakdown in shared situational awareness occurred during the flight, as indicated by the following:
Differing perspectives as to the risk presented by the aircraft track and the unstable approach;
Differing mental models regarding the aircraft position and trajectory:
The captain was intent on continuing approach to a landing;
The FO was aware of the terrain hazard and was attempting to convince the captain to go around;
The lack of corrective action by the captain in response to the FO’s go-around suggestions and advisories about the track deviation and unstable approach.
The following behaviours by the crew members interfered with the maintenance of shared situational awareness:
The captain provided an abbreviated approach briefing, which reduced the likelihood that the pilots would have the same understanding and work effectively together.
The pilots were not required to make callouts of system mode changes, and did not do so. This callout information is critical for maintaining individual and shared situational awareness.
Each pilot was focused on a different aspect of the navigational system that they each strongly believed to be providing the most reliable information about their situation. The FO focused on the localizer and GPS indications of track divergence, and the captain focused on the apparent intercept angle.
Standard phraseology for challenge and response is intended to establish a common understanding and lead to conditioned, familiar results. The FO used non-standard phraseology regarding the full localizer deflection, and did not have available standard phraseology to alert the captain to the unstable approach.
The captain’s responses to the FO’s statements about full localizer deflection were non-standard. Such responses were a progression from the FO’s non-standard language, and a movement further away from the SOPs and into crew interactions in which shared expectations and coordinated actions would be difficult to maintain.
The non-standard language used by the FO to suggest a go-around reduced the likelihood of clear communication of his intent to the captain, and was a barrier to initiating coordinated action.
Crew workload increased as the pilots attempted to understand and resolve the incongruities in their individual mental models, and again as they rapidly configured the aircraft for landing. This increase in workload reduced their ability to solve the complex navigational problem and their disparate views about it.
Both the content and nature of the intra-crew communication clearly showed signs of breakdown in shared situational awareness. The fact that neither crew member identified to the other that this breakdown was occurring was an additional problem that had to be addressed. However, rather than explicitly identifying that the breakdown in shared situational awareness had occurred, each pilot continued to emphasize his own understanding of the situation in an attempt to convince the other of its veracity.
Neither of the pilots was disengaged from the situation. Some of the captain’s statements indicate that he was confused as to the autopilot mode and the reason why the aircraft was diverging from the localizer. Similarly, some of the FO’s statements clearly indicate that he was uncomfortable with the aircraft position and trajectory. However, neither the captain nor the FO was effective in resolving the other’s confusion or discomfort, and the breakdown in shared situational awareness was not resolved until the GPWS sink rate alert provided an independent warning.
The crew did not maintain a shared situational awareness. The breakdown of this aspect of crew coordination was evident throughout the approach.
Pilot interviews revealed that other pilots also employed adaptations of SOPs. Adaptations of SOPs can impair shared situational awareness and CRM effectiveness.
2.11.3. Communications
CRM best practices are intended to enable crew members to feel comfortable providing input to assist in decision making. It is generally accepted that crew members should assert themselves when they are unsure of something or if there is a genuine concern about the current course of action. The use of clear language is essential in time-critical situations. However, use of this type of language can be very difficult for some people, and ineffective assertion has been a factor in other accidents.
In the case of FAB6560, many of the communications between the pilots were ineffective because clear and unambiguous language was not used. For example:
The captain made a statement indicating that he would use RNAV to navigate to the localizer. This message could be interpreted in more than one way.
The FO’s advisory that they had reached full localizer deflection was phrased as a question, did not include any proposed corrective action, and did not elicit the appropriate response to initiate a go-around. The captain responded in turn with a question rather than corrective action.
The FO’s suggestion at 1640:30 that they do a go-around and then talk the anomaly through did not elicit the desired response to initiate a go-around. Instead, the captain continued the approach.
The FO stated that they were at 3 miles and not configured. It is almost certain that the intended message was that the approach was unstable and a go-around was required. However, the captain’s interpretation of this statement was that they needed to finish configuring the aircraft for landing.
When the aircraft reached full localizer deflection, the FO probed with a question about the aircraft position. He repeatedly alerted the captain about the progressive deviation from the localizer, and also made an alert about the terrain to the right of the runway. Although there was no clear challenge from the FO stating the consequences of continuing the approach, he did suggest an alternative course of action. However, the FO’s communications did not achieve his goal of convincing the captain to change his course of action.
Escalation in communication strategies can be difficult. The PACE model (probing, alerting, challenging, and emergency warning) provides pilots with a communication strategy designed to allow for a natural escalation of assertion, depending on the circumstances at the time. The FO’s probing and alerting statements and suggestion of an alternative course of action were consistent with the initial portions of the PACE model. However, the FO never did escalate to the point of an emergency intervention in the form of taking control of the aircraft.
The communications between the 2 pilots were ineffective. The captain was task-saturated and was likely influenced by plan continuation bias. Despite the FO’s communication efforts, concerns about FAB6560’s flight path were not incorporated into the captain’s decision-making process.
2.11.4. Workload management
CRM best practices are intended to enable crew members to effectively manage workload. Workload is a function of the number of tasks to be completed in a given amount of time and the ability of a person to handle those demands. An increase in tasks or a decrease in time available results in increased workload. To reduce workload, one must either reduce the number of tasks that must be completed or increase the time available to complete those tasks.
FAB6560 flight crew workload began to escalate as the flight made the turn onto final approach at MUSAT. Crew workload escalated further as the approach continued. As indicated by task shedding on final approach, both pilots became affected by task saturation. The escalating workload consumed mental resources and diminished the ability of the crew to recognize the excessive workload and take corrective action.
There was no indication that either pilot recognized that they were experiencing high workload. Although the FO suggested a go-around several times, these suggestions were prompted by full localizer deflection and the unstable approach rather than workload. The crew did not attempt to use other means to increase time available to complete necessary tasks. The pilots did not effectively manage workload.
2.11.5. Problem solving and decision making
Problem solving is a multi-step process that includes decision making. Effective decision making involves the accurate understanding of the current situation and its implications, formulation of a plan, and implementation of the best course of action. Pilots must continually re-evaluate their situation to determine whether they accurately perceive the situation, and whether the plan is working out as expected or a change in the plan is required.
As flight FAB6560 progressed, the crew were faced with several problems:
Descent was initiated late, and the aircraft was about 600 feet above the glideslope as the flight turned onto final approach.
The flight deviated from the localizer, eventually reaching full deflection. This deviation resulted in a lengthy discussion that drew the crew’s attention away from configuring the aircraft for landing.
The approach was unstable, reducing the time available for task completion and thereby increasing workload for both pilots.
The pilots had divergent mental models. This divergence compromised communications between them.
During the descent from cruise altitude, the captain recognized that they were above the nominal descent profile, and increased the rate of descent in an attempt to regain profile. However, this strategy was unsuccessful, and resulted in excessive airspeed below 10 000 feet and in remaining 600 feet above profile at the turn to final approach. This outcome is an indication that the captain had not modified his initial plan.
The crew realized that the aircraft was deviating to the right of the localizer and spent considerable time discussing it. The FO made numerous advisories to the captain about the track deviation, but did not suggest corrective action. When the FO did suggest a go-around at 1640:30, his proposal was immediately rejected by the captain. This rejection is an indication that the captain had not understood the implications of the situation. Consequently, the captain likely did not perceive any need to re-evaluate or modify his plan to continue the approach to a landing.
The FO recognized that the approach was unstable, and at 1640:41, made a statement that they were at 3 miles and not configured for landing. However, the statement did not clearly identify that the approach was unstable or propose corrective action. Consequently, the captain misunderstood the statement, and his corrective action was to configure the aircraft for landing. The captain’s reaction suggests that he had not recognized that the approach was unstable; therefore, he likely did not perceive any need to re-evaluate or modify his plan to continue the approach to a landing.
As previously discussed, the FO’s mental model was that a go-around was necessary, while the captain’s mental model was that the approach could be salvaged and a landing could be made. These divergent mental models compromised their ability to communicate, with the result that the FO’s suggestions that the plan be re-evaluated were not understood or implemented by the captain.
The crew did not effectively solve the problems they encountered during the descent and final approach.
In this occurrence, the FO acted in an advisory role, providing the captain with information about aircraft state and suggestions for alternative action. However, the FO’s communications were unassertive and ambiguous. Additionally, the captain’s escalating workload had degraded his ability to perceive and understand the information that the FO was providing. Attentional narrowing, confirmation bias, and plan continuation bias also had negative effects on the captain. The captain was presented with several opportunities to re-evaluate and alter his plan, but did not do so. The captain’s decision making was ineffective.
2.11.6. Summary of FAB6560 crew resource management
Shared situational awareness, communication, workload management, problem solving, and decision making are all integral components of CRM. As discussed above, the FAB6560 flight crew did not successfully employ any of these practices. Therefore, their CRM was ineffective.
2.12. Crew resource management training at First Air
2.12.1. Initial crew resource management training
The initial CRM training outlined in the First Air Flight Operations Training Manual (FOTM) meets the requirements of Commercial Air Service Standards (CASS) 725.124(39), and is delivered by 2 motivated instructors who believe in the importance of CRM training. However, First Air does not allocate 2 days, as was intended by Transport Canada (TC). To accommodate other training requirements, First Air’s initial CRM course has been reduced to a portion of 1 day. Because of these time constraints, the instructors were unable to teach all of the required subjects specified in both the FOTM and CASS 725.124(39) for initial training. Additionally, they were using the TC CRM training package, which does not include the latest CRM concepts and training methods.
As a result, course participants did not receive training in communication strategies for escalating concerns, in problem-solving and decision-making strategies, and in strategies about how best to align mental models among all crew members. Additionally, the course participants were not provided with tips to assist with workload management on the flight deck.
The captain of FAB6560 received initial CRM training in 1997 and the FO in 2007. No information was available regarding the training content or duration. The captain’s initial training in 1997 occurred only 6 months after the regulatory requirement for training came into force. The CRM training material used by First Air was produced by TC at about the same time. Therefore, it is likely that the initial CRM training content that the captain and FO received was similar to the course observed by the TSB.
The deficiencies identified in the First Air initial CRM course are aspects of CRM that played a role in this accident, as discussed above. First Air’s initial CRM training did not provide the occurrence crew with sufficient practical strategies to assist with decision making, problem solving, communication, and workload management.
2.12.2. Recurrent crew resource management training
Regulatory requirements for recurrent training do not identify any specific CRM subjects that must be taught, and there is no requirement to review any of the CRM topics covered during initial CRM training. However, the company’s recurrent training did cover attitudes, communication, and decision making. The recurrent training described SOPs as a means to trap errors, and as a source of standard phraseology to eliminate miscommunication and minimize misunderstanding. These SOP-related objectives are a fundamental cornerstone of CRM. However, CYZF-based B737 pilots employed SOP adaptations, indicating that this emphasis on SOPs was ineffective.
Unlike the initial CRM course content, some of the material covered during the recurrent CRM course included elements of more current CRM training, like discussions related to threat-and-error management concepts. The content of First Air’s recurrent CRM training met the requirements specified in the company’s FOTM and in CASS 725.124(39)(b).
CASS 725.124(39)(b)does not stipulate a specific duration for recurrent training. Since at least 2006, the company has allocated 4 hours to cover the recurrent material. The duration of the recurrent training observed by the TSB met the specified time requirement in the FOTM.
Following initial CRM training, the FAB6560 captain and FO received annual recurrent training; the captain’s most recent recurrent training was 9 months before the accident, and the FO’s was 5 months before the accident. However, during the accident flight, neither pilot effectively applied the CRM concepts provided in the company’s recurrent training.
The annual recurrent CRM training that the occurrence pilots received did not adequately reinforce their knowledge of CRM concepts or their ability to apply those concepts during line operations.
2.13. Crew resource management regulations in Canada
Current regulations require Canadian Aviation Regulations (CAR) Subpart 705 operators to conduct CRM training, but the regulations have not kept pace with advances in CRM theory and application, and are now outdated.
Transport Canada (TC) has taken steps to address many of the issues with the existing regulation that were previously identified by the Transportation Safety Board (TSB). However, none of these proposed changes have yet been introduced into regulation. The current regulation and standard for CAR Subpart 705 CRM training have not been updated to reflect advances in CRM training. As a result, there is a risk that flight crews may not be trained in the latest internationally recognized practices in threat-and-error management techniques.
Additionally, current CRM training regulations do not identify any minimum duration for initial and recurrent CRM training. As a result, operators are free to determine how much time they dedicate to CRM training. As long as operators can show that their CRM training meets the outdated requirements of CASS 725.124(39), the CRM course can be as short as they deem appropriate.
Air operators are required to provide many categories of flight crew training. However, there can be time-related and financial pressures to shorten training like CRM. The First Air initial CRM course observed by TSB investigators was completed in just over 4 hours, rather than the 2 days intended by TC. It is not reasonable to expect that all of the TC CRM training package could be effectively taught within such a short time. If inadequate time is allocated for initial CRM training, flight crew members are unlikely to develop sufficient critical CRM skills.
The recurrent CRM training requirements, as defined in CASS 725.124(39)(b), do not provide operators with clear direction regarding the minimum requirements for recurrent CRM training. In particular, there is no requirement to revisit any of the core CRM subjects outlined in CASS 725.124(39)(a). From a training standpoint, this lack of reinforcement of core skills taught during initial CRM training could result in a return to previously learned behaviours. Without adequate reinforcement of core CRM skills during recurrent CRM training, there is increased risk that flight crews will experience difficulty employing effective CRM on the flight deck.
In order for an operator’s CRM program to be approved, the operator must demonstrate that its program meets the requirements outlined in CASS 725.124(39). The standard practice is for the operator to submit its CRM training plan, often embedded as part of the company operations manual, to regional TC offices for approval. The regional TC office will then compare the training plan to the Standard to see whether the required elements are listed.
First Air had a CRM training plan that had been approved by TC. However, there is no indication that TC has ever attended one of First Air’s initial CRM courses. As a result, the company has not received feedback from the regulator regarding the quality of its initial CRM training and whether the course, as taught, meets regulatory requirements.
Facilitation is a specialized skill that must be developed. If individuals selected to teach CRM do not possess the necessary facilitation skills, they may experience difficulties effectively guiding participants through the training material. Ineffective facilitation could result in poor retention of the skills taught during the course.
In Canada, there is no requirement for CRM facilitators/instructors to complete a formal training course or to obtain any type of accreditation. Consequently, none of the instructors conducting CRM training in Canada are required by regulation to have demonstrated a minimum level of experience and/or training qualification. CAR 705 crew members required to complete CRM training number in the thousands, and many CAR 703 and 704 operators voluntarily provide CRM training to additional crew members. Neither of the company’s primary CRM instructors had received any formal facilitator/instructor training or accreditation in teaching CRM. The absence of instructor accreditation requirements increases the risk that flight crews will not receive effective CRM training.
The importance of having qualified CRM instructors has been recognized by the United Kingdom Civil Aviation Authority (CAA), which has a fully developed CRM accreditation process in place to ensure that flight crews receive the best possible CRM training.
2.15. First Air safety management system internal reporting processes
The First Air safety management system (SMS) enables employees to report safety issues using any of several reporting methods. However, the 2 previous events involving B737 navigational difficulties during instrument flight rules (IFR) approaches were not reported by First Air pilots to management. The absence of reports of Incidents One and Two constituted missed opportunities for organizational learning and identification of potential safety issues. That the go-around in Incident Two (a mandatory reporting item) was not reported indicates that the company’s reporting systems were not fully effective.
Hazardous situations which are not reported are unlikely to be identified or investigated; consequently, corrective action cannot be taken to mitigate associated risk.
2.16. CYRB instrument landing system functionality
There was no interference with the normal functionality of the instrument landing system (ILS) for Runway 35T in CYRB.
2.17. VOR scenario
After the inbound turn at MUSAT, the flight path of FAB6560 appears to be a track directly toward the YRB VOR. However, it can be concluded with certainty that the crew were not navigating using the VOR or intentionally tracking toward the VOR. The following information supports this conclusion:
Neither pilot mentioned the YRB VOR at any time during the period recorded on the cockpit voice recorder (CVR).
At 1615:24.1, the captain clearly briefed his intention to fly to the localizer using instrument approach based on area navigation (RNAV).
At 1617:11.9, the captain conducted a briefing for the ILS Runway 35T.
The Morse code identification IRB was recorded on the CVR every 32.3 seconds after 1617:08.5, indicating that at least one of the VHF NAV receivers was certainly tuned to the distance measuring equipment (DME) associated with the ILS for Runway 35T.
Discussion between the pilots during final approach included repeated references to deviation right of the localizer and the GPS flight-planned track.
Lab analysis of the no. 1 and no 2 VHF NAV control units clearly indicate that both units were tuned to the IRB ILS frequency, 110.30 megahertz (MHz).
Lab analysis of the VHF NAV transfer switch indicates that the switch was likely in the NORMAL position before impact. Consequently, it is likely that the no. 3 VHF NAV receiver would have been in standby mode and not controlled.
Both GPS units were programmed with the RNAV approach to Runway 35T with waypoints MUSAT, OTNEL, and RW35. The active waypoint was OTNEL. The YRB VOR was not included in the flight plan on either GPS.
2.18. Guidance for flight data recorder maintenance
As identified in this occurrence, the ED-55 guidance for flight data recorder (FDR) maintenance was insufficient to ensure FDR serviceability, specifically due to the short sample of data used for the correlation check (15 minutes). It is probable that there are other unserviceable FDR systems installed on aircraft operating in Canada.
FDR maintenance guidance (CAR Standard 625, Appendix C) by Transport Canada (TC) does not refer to the current European Organisation for Civil Aviation Equipment (EUROCAE) flight recorder specification, and therefore provides insufficient guidance to ensure the serviceability of FDRs. This insufficiency increases the risk that information needed to identify and communicate safety deficiencies will not be available.
2.19. Terrain awareness devices
The aircraft was equipped with an older-generation ground proximity warning system (GPWS), which provided only an aural alert and light when the aircraft was within the proximity parameters of the device. The device used radio altimeter information to determine proximity to terrain below the aircraft, and therefore did not provide a warning for rising terrain in front of the aircraft.
A terrain awareness and warning system (TAWS) provides both an aural warning and map display of terrain in front of the aircraft. The map display not only presents the crew with information regarding the terrain elevation along the flight path, but also provides additional situational awareness as to aircraft position relative to obstacles and the intended flight path. Improvements in the sources of information used to calculate and predict ground proximity have resulted in earlier warning notices and increased time for crew reaction. The new regulatory amendments requiring TAWS equipment on commercial aircraft configured with 6 or more passenger seats should substantially mitigate the risk of controlled flight into terrain (CFIT) accidents.
In this occurrence, the crew’s situational awareness would have been enhanced and reaction time to a ground proximity warning would have been increased had the aircraft been equipped with a TAWS.
2.20. Survivability
The survivability of the occurrence was related to the extent of damage sustained by the occupants’ restraint systems. Occupants whose seats separated from the fuselage early in the breakup sequence sustained more severe injuries, consistent with forceful contact with the ground. Occupants whose seats remained largely intact, upright, and partially attached to the left portion of the cabin floor, throughout or until late in the crash sequence, generally sustained less severe injuries, consistent with less forceful contact with injurious surfaces. All of the survivors belonged to this latter group.
2.21. NOTAM system
There were numerous NOTAMs (notices to airmen) issued to change the effective period of the military terminal control area (MTCA). The content of these NOTAMs was the same, with the exception of the bottom line, which provided the revised date and time groups. In some instances, the only change to the NOTAM content was 3 numeric characters on the bottom line of a coded 14-line message.
A new NOTAM is designated as NOTAMN and provides new information to airspace users. As such, it is likely to elicit users’ attention. The first NOTAMR (replacement NOTAM) is also likely to elicit users’ attention. A second NOTAMR, even with the replaced NOTAM number following the R, may only be examined in a cursory fashion, because the pilot may have seen the R designation previously. The pilot may therefore conclude that this is the same message read previously, especially given that there is no method of highlighting subtle changes.
NOTAMs issued through the Aviation Weather Web Site (AWWS) do not include the R, C, or N designations, and therefore, every NOTAM must be treated as a new NOTAM. However, upon initial scan of a new NOTAM regarding the Operation NANOOK airspace, the reader may think it is the same message as a previous one, because the text was identical except for a few digits at the bottom indicating a change to the effective date.
The issuance of so many almost identical NOTAMs in anticipation of a successful flight check, without any assurance that a flight check would be scheduled or could be carried out, may have led to confusion among the crews and the NAV CANADA Edmonton Area Control Centre (ACC) controller as to the status of the airspace.
The crews of FAB6560 and KBA909, as well as the Edmonton ACC controller handling FAB6560, all expected that the MTCA would be in effect and that control services would be provided. The NOTAMs issued concerning the establishment of the MTCA did not succeed in communicating the information needed by the airspace users.
2.22. CYRB air traffic control
All references to air traffic services at CYRB refer to military equipment and personnel, unless otherwise stated.
The CYRB 1600 routine aviation weather report (METAR) was the most recent report available to controllers and pilots. Although the CYRB terminal controller did not provide landing information on initial contact with FAB6560, the flight crew already had the 1600 CYRB METAR. Consequently, the fact that the CYRB terminal controller did not provide this information did not detract from the crew’s mental model and is not contributory to the accident. The CYRB tower controller’s responsibilities did not include providing ceiling and visibility; if they had, the controller would not have had any more recent information than the crew already had.
The tower controller did not have radar information available, and the weather prevented visual determination of the position of FAB6560. Therefore, the tower controller did not have the information required to determine whether any position warning was warranted.
Although the radar was not flight-checked, it was operating during the arrival of FAB6560, and radar information was available on both the area surveillance radar (ASR) and precision approach radar (PAR) displays in the terminal trailer. The radar could not be used for provision of control services, because it had not been flight-checked; therefore, the terminal controller was not providing control services and was not actively monitoring the radar displays. Consequently, the terminal controller was not aware of FAB6560’s proximity to terrain.
Neither the tower nor the terminal controller had sufficient valid information available to cause them to issue a position advisory to FAB6560.
The choice of Class D airspace for both the MTCA and the CYRB control zone was based on the desire to ensure that all aircraft within the airspace would be provided with positive control service. When the radar could not be used, the military determined that it could not provide services in the MTCA, and repeatedly delayed its establishment. The control zone, however, was in effect, but no consideration was given to the need to provide non-radar instrument flight rules (IFR) service, which the selection of a Class D control zone required.
Within a control zone, IFR control services would normally be provided by an IFR controller in the associated IFR control unit. However, the CYRB MTCA was not in effect; therefore, the airspace surrounding the control zone was Class G uncontrolled. Without the MTCA or a control area extension, insufficient airspace was available for providing IFR control services within the control zone to arriving or departing aircraft. Because the MTCA was not in effect, no separation standard or approach clearances were provided to FAB6560 and KBA909. This situation resulted in a loss of IFR separation between FAB6560 and KBA909 when KBA909 entered the Class D control zone at 1640:55.
There was no formal declaration of an alert phase by the CYRB control tower. However, some agencies that would normally be advised that the aircraft was in the SAR alert phase were made aware of the missing aircraft during the communication search for FAB6560. Joint Rescue Coordination Centre (JRCC) Trenton was ultimately notified by NAV CANADA Edmonton air control centre (ACC). The delay in notification of the JRCC did not delay the emergency response to the crash site, because the fire hall resources were already on standby and deployed immediately when the crash site became visible.
2.23. Aircraft maintenance
2.23.1. Airworthiness directives
As a result of AD 2004-19-10 and AD 2006-12-23 not being fully accomplished, the certificate of airworthiness for C-GNWN was not in effect at the time of the accident.
There were no anomalies entered into the aircraft logbooks related to controllability issues, and there was no indication in the flight data recorder that the crew had any controllability issue with the aircraft.
It is therefore concluded that the non-compliance with these 2 ADs did not contribute to the accident.
2.23.2. Emergency locator transmitter
The emergency locator transmitter (ELT) was installed with the activation switch in the OFF position. However, even if it had been in the ON position, it is unlikely that the transmission signal would have been strong enough to be detected, as the antenna cable was severed at impact. Therefore, it is concluded that the activation switch position of the ELT did not delay the rescue response for this accident.
The identification information programmed on the aircraft interface module (dongle) was from the aircraft that the ELT had previously been installed on. Since the ELT was unable to transmit, the incorrect identification information was not a factor.
2.24. Flight data monitoring
Proactive and non-punitive analysis of de-identified data generated during flight operations can help to identify and control risk present in a company’s operations. This capability provides a means to monitor pilot behaviour in addition to formal assessment tools, such as training and check rides. Air carriers that do not employ some form of flight data monitoring will have inadequate knowledge of risks existing within the company. This inadequacy can impair an air carrier’s ability to identify and mitigate the risks. If air carriers do not monitor flight data to identify and correct problems, there is a risk that adaptations of standard operating procedures will not be detected.
Although First Air has a flight data monitoring (FDM) program, the company’s FDM program was undergoing a transition to a new service provider at the time of the accident, and data analysis was not being conducted. This hiatus deprived the company of an opportunity to identify adaptations of SOPs, such as continuation to landing following an unstabilized approach.
2.25. Weather
The latest CYRB weather observation available to the crew was the 1600 METAR, which they obtained at 1609. The next recorded weather observation was a special weather report (SPECI) at 1649. The crew of FAB6560 had the most recent information available.
The CYRB visibility decreased from 10 miles at 1600 to 5 miles at 1649. This decline in visibility would not have triggered a SPECI. The CYRB ceiling decreased from 700 to 300 feet during this period. However, no information was available as to when the change occurred.
At 1641:41, the FO stated that he saw the shoreline. This statement means that he could briefly see the surface, and indicates that the cloud base was likely ragged. The CYRB airport elevation is 222 feet above sea level (asl), and the elevation of the wreckage was approximately 400 feet asl. The fire and smoke originating from the central fuselage and wings were not visible from the airport from the time of the crash until 1719. This fact indicates that the cloud base in that sector of the sky was less than 200 feet above the airport. However, because there is no information about the cloud base in other sectors of the sky, no conclusion can be drawn as to the cloud ceiling at the airport at the time of the accident.
Seven minutes after the accident, the CYRB 1649 SPECI reported an observed ceiling of 300 feet agl, which was 100 feet above approach minimums. Adding this ceiling height to the airport elevation of 222 feet, the reported cloud base would have been at 500 feet asl, which was about 100 feet above the crash site. Given that the site did not become visible until 1719, the cloud base in that vicinity of the hills was on the surface. The ceiling at the accident site differed somewhat from the conditions observed directly over the airport.
Observed surface visibility was 10 miles at 1600, and 5 miles at 1649. Although the visibility at the airport at the time of the accident is unknown, it likely did not decrease below approach minimums at any time during the arrival of FAB6560.
2.26. Risk associated with unstable approaches
Research has shown that unstable approaches present a high risk to safe flight operations.Footnote 164 As shown in previous investigations by TSB and other foreign agencies, negative outcomes include tail strikes, runway overruns, and controlled flight into terrain (CFIT). While there are some defences in place to mitigate the risk of unstable approaches, not all defences are employed by all operators. In this investigation, the Board examined in detail the defences available to air carriers to mitigate the risks associated with unstable approaches and their consequences. These mainly administrative defences include:
A company stabilized-approach policy, including a no-fault go-around policy;
Operationalized stable approach criteria and standard operating procedures (SOPs), including crew phraseology;
Effective crew resource management (CRM), including empowering of first officers to take control in an unsafe situation;
Use of flight data monitoring (FDM) programs to monitor SOP compliance with stabilized approach criteria;
Use of line-oriented safety audits (LOSA) or other means, such as proficiency and line checks, to assess CRM practices and identify crew adaptations of SOPs;
Non-punitive reporting systems (to report occurrences or unsafe practices);
Use of terrain awareness and warning systems (TAWS).
While First Air had some of these defences in place, including a stabilized approach policy and criteria, a no-fault go-around policy, safety management system (SMS) hazard and occurrence reporting, the two-communication rule, and an older-generation GPWS, these defences were not robust enough to prevent the continuation of the unstable approach or collision with terrain. Other TSB investigations have shown that non-adherence to company SOPs related to stabilized approaches is not unique to First Air.Footnote 165
Current defences against continuing unstable approaches have proven less than adequate.
Unless further action is taken to reduce the incidence of unstable approaches that continue to a landing, the risk of CFIT and of approach and landing accidents will persist.
3.0 Findings
3.1. Findings as to causes and contributing factors
The late initiation and subsequent management of the descent resulted in the aircraft turning onto final approach 600 feet above the glideslope, increasing the crew's workload and reducing their capacity to assess and resolve the navigational issues during the remainder of the approach.
When the heading reference from the compass systems was set during initial descent, there was an error of −8°. For undetermined reasons, further compass drift during the arrival and approach resulted in compass errors of at least −17° on final approach.
As the aircraft rolled out of the turn onto final approach to the right of the localizer, the captain likely made a control wheel roll input that caused the autopilot to revert from VOR/LOC capture to MAN and HDG HOLD mode. The mode change was not detected by the crew.
On rolling out of the turn, the captain's horizontal situation indicator displayed a heading of 330°, providing a perceived initial intercept angle of 17° to the inbound localizer track of 347°. However, due to the compass error, the aircraft's true heading was 346°. With 3° of wind drift to the right, the aircraft diverged further right of the localizer.
The crew's workload increased as they attempted to understand and resolve the ambiguity of the track divergence, which was incongruent with the perceived intercept angle and expected results.
Undetected by the pilots, the flight directors likely reverted to AUTO APP intercept mode as the aircraft passed through 2.5° right of the localizer, providing roll guidance to the selected heading (wings-level command) rather than to the localizer (left-turn command).
A divergence in mental models degraded the crew's ability to resolve the navigational issues. The wings-level command on the flight director likely assured the captain that the intercept angle was sufficient to return the aircraft to the selected course; however, the first officer likely put more weight on the positional information of the track bar and GPS.
The crew's attention was devoted to solving the navigational problem, which delayed the configuration of the aircraft for landing. This problem solving was an additional task, not normally associated with this critical phase of flight, which escalated the workload.
The first officer indicated to the captain that they had full localizer deflection. In the absence of standard phraseology applicable to his current situation, he had to improvise the go-around suggestion. Although full deflection is an undesired aircraft state requiring a go-around, the captain continued the approach.
The crew did not maintain a shared situational awareness. As the approach continued, the pilots did not effectively communicate their respective perception, understanding, and future projection of the aircraft state.
Although the company had a policy that required an immediate go-around in the event that an approach was unstable below 1000 feet above field elevation, no go-around was initiated. This policy had not been operationalized with any procedural guidance in the standard operating procedures.
The captain did not interpret the first officer's statement of “3 mile and not configged” as guidance to initiate a go-around. The captain continued the approach and called for additional steps to configure the aircraft.
The first officer was task-saturated, and he thus had less time and cognitive capacity to develop and execute a communication strategy that would result in the captain changing his course of action.
Due to attentional narrowing and task saturation, the captain likely did not have a high-level overview of the situation. This lack of overview compromised his ability to identify and manage risk.
The crew initiated a go-around after the ground proximity warning system “sink rate” alert occurred, but there was insufficient altitude and time to execute the manoeuvre and avoid collision with terrain.
The first officer made many attempts to communicate his concerns and suggest a go-around. Outside of the two-communication rule, there was no guidance provided to address a situation in which the pilot flying is responsive but is not changing an unsafe course of action. In the absence of clear policies or procedures allowing a first officer to escalate from an advisory role to taking control, this first officer likely felt inhibited from doing so.
The crew's crew resource management was ineffective. First Air's initial and recurrent crew resource management training did not provide the crew with sufficient practical strategies to assist with decision making and problem solving, communication, and workload management.
Standard operating procedure adaptations on FAB6560 resulted in ineffective crew communication, escalated workload leading to task saturation, and breakdown in shared situational awareness. First Air's supervisory activities did not detect the standard operating procedure adaptations within the Yellowknife B737 crew base.
3.2. Findings as to risk
If standard operating procedures do not include specific guidance regarding where and how the transition from en route to final approach navigation occurs, pilots will adopt non-standard practices, which may introduce a hazard to safe completion of the approach.
Adaptations of standard operating procedures can impair shared situational awareness and crew resource management effectiveness.
Without policies and procedures clearly authorizing escalation of intervention to the point of taking aircraft control, some first officers may feel inhibited from doing so.
If hazardous situations are not reported, they are unlikely to be identified or investigated by a company's safety management system; consequently, corrective action may not be taken.
Current Transport Canada crew resource management training standards and guidance material have not been updated to reflect advances in crew resource management training, and there is no requirement for accreditation of crew resource management facilitators/instructors in Canada. This situation increases the risk that flight crews will not receive effective crew resource management training.
If initial crew resource management training does not develop effective crew resource management skills, and if there is inadequate reinforcement of these skills during recurrent training, flight crews may not adequately manage risk on the flight deck.
If operators do not take steps to ensure that flight crews routinely apply effective crew resource management practices during flight operations, risk to aviation safety will persist.
Transport Canada's flight data recorder maintenance guidance (CAR Standard 625, Appendix C) does not refer to the current flight recorder maintenance specification, and therefore provides insufficient guidance to ensure the serviceability of flight data recorders. This insufficiency increases the risk that information needed to identify and communicate safety deficiencies will not be available.
If aircraft are not equipped with newer-generation terrain awareness and warning systems, there is a risk that a warning will not alert crews in time to avoid terrain.
If air carriers do not monitor flight data to identify and correct problems, there is a risk that adaptations of standard operating procedures will not be detected.
Unless further action is taken to reduce the incidence of unstable approaches that continue to a landing, the risk of controlled flight into terrain and of approach and landing accidents will persist.
3.3 Other findings
It is likely that both pilots switched from GPS to VHF NAV during the final portion of the in-range check before the turn at MUSAT.
The flight crew of FAB6560 were not navigating using the YRB VOR or intentionally tracking toward the VOR.
There was no interference with the normal functionality of the instrument landing system for Runway 35T at CYRB.
Neither the military tower nor the military terminal controller at CYRB had sufficient valid information available to cause them to issue a position advisory to FAB6560.
The temporary Class D control zone established by the military at CYRB was operating without any capability to provide instrument flight rules separation.
The delay in notification of the joint rescue coordination centre did not delay the emergency response to the crash site.
The NOTAMs issued concerning the establishment of the military terminal control area did not succeed in communicating the information needed by the airspace users.
The ceiling at the airport at the time of the accident could not be determined. The visibility at the airport at the time of the accident likely did not decrease below approach minimums at any time during the arrival of FAB6560. The cloud layer at the crash site was surface-based less than 200 feet above the airport elevation.
4.0 Safety action
4.1. Safety action taken
4.1.1. Transportation Safety Board of Canada
On 26 August 2011, the Transportation Safety Board (TSB) advised NAV CANADA of a discrepancy regarding one of the spot heights depicted on the CYRB approach plates. The TSB suggested that NAV CANADA validate the position and take amending action if necessary.
On 08 November 2011, TSB investigators presented a briefing to First Air senior management personnel regarding several operational safety issues (detailed below) that were uncovered during the initial stages of the investigation:
Standard operating procedures (SOPs) − First Air has an extensive compendium of SOPs for the Boeing 737. However, during the course of the investigation, several instances of crew adaptations and/or uncertainty with respect to the SOPs were discovered, specifically regarding:
procedures for unstable approach resolution (i.e., lack of concise language);
transition from global positioning system (GPS) intercept track to final ILS approach guidance; and
magnetic compass use in locations where true compass is required.
The validation of training processes and construct of SOPs may need to be examined.
Checklist design and usage − The in-range checklist is being held at the line (i.e., natural pause point), yet the landing checklist has to be initiated to start slowing the aircraft (gear, flaps 15). This practice creates a sequencing issue for crews, especially as to how the interruption and resumption of checklist items is carried out. The company was aware of this issue, but had not yet initiated corrective action.
Crew resource management (CRM) − It was emphasized that adaptations of SOPs and non-concise procedural language are a hazard to good communication within the crew. Additionally highlighted was the need for direction as to how a first officer can escalate from an advisory role to taking control when faced with a deteriorating situation.
Incident reporting system − First Air has a non-punitive reporting system as part of its safety management system. TSB investigators were advised of 2 incidents that were not reported to the company. The absence of reports represents missed opportunities for organizational learning, and may warrant a look at whether further corporate education is required in this area.
Technical issue − Flight data recorder (FDR) correlation checks accomplished by First Air showed a data-drop problem that has been present for the past few years and that was not identified and rectified. Maintenance staff may need to examine the procedures for data validation.
On 19 December 2011, the TSB advised NAV CANADA that a review of the CYRB approach plates and aerodrome chart indicated 4 different magnetic variation depictions. A limited review of Canada Air Pilot, volume (CAP) 1,Footnote 166 showed that many other locations similarly have different values for the magnetic variation depicted on different plates. The TSB suggested that NAV CANADA may wish to take amending action to depict consistent information in Canada Air Pilot, CAP 1, and amend processes to ensure that future magnetic variation depictions are consistent.
On 08 February 2012, the TSB issued Aviation Safety Advisory A11H0002-D1-A1, IFR Separation in Class D Airspace, to the Commander of the 1 Canadian Air Division, Royal Canadian Air Force. The advisory stated:Footnote 167
Because military ATC continued to operate the Class D control zone without the ability to provide IFR separation in instrument meteorological conditions, there was an increased risk of mid-air collision. Unless future EATM operations include the provision for all the air traffic services required for the class of airspace, this risk will persist.
On 12 April 2012, the TSB issued Aviation Safety Information letter A11H0002-D2-L1, Inadequate Guidance for FDR Maintenance,Footnote 168 to Transport Canada. The letter indicated that the Canadian Aviation Regulations (CAR) Standard for FDR maintenance does not reflect the current EUROCAE (European Organisation for Civil Aviation Equipment) specifications for flight recorder maintenance, and therefore provides insufficient guidance to ensure the serviceability of FDRs.
On 26 April 2012, TSB investigators presented a briefing to senior First Air management personnel regarding the company's CRM training. First Air conducts its initial CRM training during type training for newly hired pilots. TSB investigators attended a First Air initial CRM training course on 03 April 2012; this was the first initial CRM course conducted since the accident. The course was time-compressed, and did not address all of the modules required under CAR 705.124 − Training Program,Footnote 169 and Commercial Air Service Standards (CASS) 725.124(39) − Crew Resource Management Training.Footnote 170 Additionally, the content of the material presented was dated and did not include practical tools and strategies. It was suggested that the company may want to allocate more time to CRM training and update the course content.
4.1.2. First Air
4.1.2.1. Flight data recorder correlation check
First Air conducted an audit of its FDR correlation check procedures, and presented the results to TSB investigators on 08 December 2011. It was subsequently determined that First Air was conducting the data correlation check in line with the CAR. The unidentified data-drop problem was related to inadequate guidance for flight data recorder maintenance as described in TSB Safety Information Letter A11H0002-D2-L1.
4.1.2.2. Response to the 08 November 2011 and 26 April 2012 Transportation Safety Board briefings
Following the 08 November 2011 TSB briefing, First Air entered the safety issues presented into its safety management system file. The company evaluated the issues and developed a plan to address them. On 25 July 2012, First Air communicated its corrective action to the TSB. On 01 August 2013, this information was further updated to indicate the status of actions taken. Those actions are described below.
4.1.2.2.1. Standard operating procedures
First Air completed a review of B737, B767, ATR42, ATR72, and L382 standard operating procedures (SOPs) to identify adaptations of SOPs. Knowledge and procedural deficiencies were identified as areas for review and improvement.
Immediate actions
The following flight operations memoranda (FOPMs) were issued:
FOPM-11-55 was issued to provide crews with a comprehensive message from senior management concerning flight operations and with briefing instructions for the chief pilots. All flight crew members were individually briefed by their respective chief pilots to reiterate the requirement and importance of following the policies in the flight operations manuals and standard operating procedures. This management direction was instituted to ensure that all crew members understand their roles in maintaining a safe operation.
FOPM-11-072 − Escalating from an Advisory Role to Taking Control (24 November 2011) was issued, and the details of this direction were included in amendments to the flight operations manual as follows:
Any crew member can command a go-around using the call “Go around.”
Criteria for establishing a stabilized approach were enhanced.
The no-fault go-around policy was reinforced.
After reviewing industry best practice, the “two-communication rule” was reinforced.
Following review of industry best practice, the policy on pilot incapacitation was reinforced.
Standard callouts and tolerances have been produced across the fleets and incorporated within the fleets' AOMs.
FOPM-737-12-009 − Final Approach Intercept Procedures (20 January 2012) was issued, clarifying the transition from GPS/FMS (flight management system) intercept procedures to a ground-based navigational aid. This information has since been incorporated into the AOM.
FOPM-737-12-008 − Autopilot Management During ILS Intercept (20 January 2012) was issued, clarifying the use of the autopilot and flight director systems, and was incorporated into the AOM.
FOPM-12-004 − Mag/DG Selection (09 January 2012) was issued to all flight crew, emphasizing the importance of following SOPs and policies in all areas of the company's operations.
As well, a meeting was held with all fleet training pilots, stressing the importance of following SOPs and of maintaining vigilance for and eliminating adaptations of SOPs in line operations. This meeting also included guidance from management to place increased emphasis on system knowledge and effective use of the auto flight system during subsequent line checks, training courses, and simulator sessions.
Ongoing actions
The chief pilots of all aircraft types met for several days in the second half of 2012 to discuss common calls and procedures across all fleets. SOPs for all aircraft types have been rewritten in a common format. The first approval for the B737-200 and B737-400 SOPs was received in June 2013 from Transport Canada (TC), and these SOPs are in use. SOPS for the remaining types are planned for submission in a manageable flow to TC, and will be implemented in the fall to winter of 2013−14 as soon as they are approved and distributed and the training in differences is provided.
Linked with this project was a complete rewriting of the Ground Icing Operations Manual. The manual was submitted to TC and approved on 21 August 2012.
The rewriting of the Flight Operations Training Manual has been completed. The manual was re-named the Flight Crew Training Manual, was submitted to TC, and was approved on 19 November 2012.
First Air contracted outside expertise to provide a modern perspective on SOPs and their construction and use. The contracted company provided training on behavioural risk management (i.e., management of the risks related to not following SOPs) to management personnel in a leadership role. The knowledge gained is in practical use.
4.1.2.2.2. Checklist design and usage
The absence of the line on the landing checklist and the overlaps in the checklist were addressed through an amendment to the AOM.
4.1.2.2.3. Crew resource management
The crew resource management training was reviewed and updated with more modern content. The length of the initial course was increased to one full day.
4.1.2.2.4. Reporting system
A review of the reporting system and requirements was conducted. As part of the review, it was identified that certain policies in force may have contributed to reporting fatigue in limited areas. Several policies in place required items that were part of normal operations to be reported regularly, such as a normal diversion due to weather. Given the complex nature of the operating environment, other items may not have been reported due to the workload and the complexity of the policy and form used. The air safety report has been amended to remove the requirements to report expected normal operations items, decluttering it to provide more opportunity to describe any events that require attention. The importance of ongoing reporting of hazards was included within the notification to the crews of the air safety report form and policy changes. These actions were completed in October 2012.
Additionally, the manager of flight safety published 2 articles in the company newsletter promoting reporting in all aspects of flight operations.
4.1.2.2.5. Training standards
A review and revision of the Line Check Pilot Course was completed. The aim of this course is to ensure that all training and check personnel have a common standard by which to validate the training and to ensure that all company procedures are understood and followed. The first course was delivered on 24 July 2012.
4.1.2.2.6. Initial and recurrent training
First Air is conducting a review of all initial training. A review of simulator training, line indoctrination, and recurrent training will follow. Each of these programs will contain elements that reinforce crew resource management techniques.
4.1.2.2.7. Maintenance
Maintenance Services has initiated a program to determine the drift rate of the directional gyros while on the ground. If excessive drift rates are detected, an enhanced maintenance program will be put in place to provide acceptable performance. Coupled with this program will be feedback to flight crews to increase awareness of the operation of this system and of the reports required to maintain reliability.
4.1.2.2.8. Flight data monitoring program
First Air's flight data monitoring (FDM) program has been reviewed, and an outside company has been contracted to provide assistance and guidance in detecting SOP adaptations and other areas requiring training enhancement. The manager of the program produces quarterly reports, which are reviewed at the executive safety management meetings on a quarterly basis. This initiative has provided data for improvements in training and day-to-day operations for all aircraft types in the First Air fleet.
Subsequent to the discovery that Airworthiness Directives AD 2004-19-10 and AD 2006-12-23 had not been fully accomplished, First Air initiated a safety management system (SMS) investigation to determine why this had happened and to verify whether the same shortfall had occurred with the other B737 aircraft in its fleet.
Airworthiness Directive 2004-19-10
The company's investigation revealed that 5 of the remaining Boeing 737 fleet aircraft were also overdue for inspections of the horizontal stabilizer pivot hinge pins required by AD 2004-19-10.
The short-term corrective action plan grounded the affected aircraft until the required inspections of the horizontal stabilizer pivot hinge pins were completed. No anomalies were identified as a result of these inspections, and the aircraft were returned to service.
The corrective action plan implemented through the SMS included the arrangement of a third-party in-depth audit of all airworthiness directives pertaining to company Boeing 737, ATR (Avions de transport régional) and Lockheed C-130 Hercules aircraft. The company has created a new position that is primarily responsible for performing a separate and independent review of all future company evaluations of airworthiness directives. The company has also initiated development of a syllabus for mandatory airworthiness directive training (initial and recurrent) for all staff involved in the evaluation of airworthiness directives.
Airworthiness Directive 2006-12-23
When the operator was advised of the deferred free play entered on a deferred maintenance item (DMI) card, an audit of the records of its remaining Boeing 737 fleet aircraft was immediately undertaken. It was confirmed that none of these aircraft were operating with any deferrals from the completion of AD 2006-12-23.
Short-term corrective action was taken to remove the errant service maintenance procedure from the maintenance database and revise it to remove the incorrect deferral instructions. The company has committed to review all service maintenance procedures for its fleet during implementation of the newly acquired TRAXsoftware.
4.1.2.4. Emergency locator transmitter
Upon notification from the TSB that the emergency locator transmitter (ELT) installed on C-GNWN had not been armed, First Air initiated an SMS investigation. An immediate fleet-wide inspection confirmed that all of the remaining B737 aircraft had functioning ELTs.
The SMS investigation determined the following:
The ELT installed on C-GNWN on 07 October 2010 was not placed in the ARMED position after installation, and the aircraft interface module programming was not transferred to the ELT transmitter unit.
The installation of the ELT was carried out as notified by Scheduled Maintenance Action (SMA) 59600. The maintenance action “ELT replaced” was recorded on an additional worksheet with reference to Log Sheet 292877, in accordance with company policy. There was no reference on the SMA notification to the Aircraft Maintenance Manual Supplement MMS37-05-007, which provides the fault isolation and the instructions for removal and installation.
The most probable cause of the incident was a lack of clear instructions on the technical documentation, which contributed to the ground engineer not performing an installed systems test in accordance with instructions in Supplement MMS37-05-007.
First Air implemented the following corrective action:
A maintenance directive was issued on 30 April 2012 to reiterate that a maintenance release shall not be made unless it has been verified that the maintenance was accomplished in accordance with the Aircraft Maintenance Manual or Supplements and/or the Company Maintenance Control Manual, Section 6.5.
A memo was issued to the planning department to enhance its technical documentation as much as possible by providing accurate maintenance references before the documentation is issued.
As a proactive measure, the maintenance program was revised to include a requirement to function-check ELTs every 6 months, in accordance with approved data, to verify serviceability.
4.1.2.5. Compass operations
On 18 February 2014, in response to an internal hazard occurrence report regarding accuracy and operation of B737-200 directional gyros (DGs), the company issued FOPM B737-14-013, B737-200 Compass System – Directional Gyro Monitoring, to all B737 flight crew members. This document provided revised requirements regarding when and how compass heading checks must be conducted.
4.1.3. Royal Canadian Air Force
On 05 March 2012, the Royal Canadian Air Force (RCAF) responded to TSB Aviation Safety Advisory A11H0002-D1-A1, dated 08 February 2012, regarding the loss of IFR separation in Class D controlled airspace. The letter stated that the leadership team that deploys in support of future expeditionary air traffic management (EATM) initiatives will now include a senior air traffic control officer to ensure that a greater level of experience is present throughout the planning process and the conduct of operations. The lessons learned from this incident were communicated to the air traffic controllers that deployed during the most recent military exercise, Exercise Maple Resolve, and robust plans were developed to ensure that RCAF personnel are prepared to provide all required air traffic services for the airspace established. The planning process that was followed for Exercise Maple Resolve, in addition to the local orders and the airspace control arrangement that were created, will serve as templates for future EATM initiatives. These lessons learned will also be communicated to all air traffic control units.
4.1.4. Transport Canada
Following the accident, during the period from 13−21 September 2011, TC conducted a series of process inspections to verify compliance with the Canadian Aviation Regulations (CAR) and associated Commercial Air Service Standards (CASS). The activities and areas reviewed related to the safe conduct of commercial flying operations at First Air, and included crew training, crew pairing, flight planning, dispatch (operational and technical), flight monitoring and tracking, operational decision-making processes, the role of commercial operations in decision making, company expectations of incident reporting, and defect control.
The inspections concluded that the flight crew training records, defect recording, rectification deferral control procedures, and technical dispatch procedures did not meet the minimum regulatory requirements as set out in CAR 705.127(1)(c), 726.08(1), 726.08(m) and 726.08(o). The processes were found deficient because company practices were not as documented or were not effective.
Four findings were raised. The company submitted corrective action plans (CAPs) to address the issues of non-compliance that were identified by the findings. The CAPs were accepted, and subsequent follow-up by TC Civil Aviation inspectors confirmed the effectiveness of the implemented corrective actions.
On 27 August 2012, TC responded to TSB Aviation Safety Information letter A11H0002-D2-L1, dated 12 April 2012, regarding inadequate guidance for FDR maintenance. TC acknowledged that the reference to EUROCAE specifications in CAR Standard 625, Appendix C,Footnote 171 is out of date. It further indicated that the same reference problem with outdated EUROCAE documents also exists with the cockpit voice recorder (CVR) requirements. TC is in the process of revising the CVR requirements in CAR Standard 625, Appendix C, and providing the appropriate reference to the latest EUROCAE documents. Once this regulatory development has been completed for the CVR requirements, TC will begin to develop the necessary regulatory changes to update the FDR requirements.
4.1.5. NAV CANADA
On 05 September 2012, NAV CANADA responded to the information presented by the TSB regarding navigational products, and communicated the following:
The spot height depiction was added at a time when the extraction and placement of data was done by manual methods. The location is within current tolerances based on the scale of the product. NAV CANADA is now using a set of technologies for completing procedure design and adding topographic data to instrument procedures. All of the approach charts will be reviewed and updated using these tools from January through August 2013.
The magnetic variation at CYRB and all other northern sites has been updated. NAV CANADA is changing from a date-driven update system to a system that is triggered by a magnetic variation tolerance value.
4.2. Safety action required
4.2.1. Unstable approaches
In this accident, the aircraft arrived high and fast on final approach, was not configured for landing on a timely basis, had not intercepted the localizer and was diverging to the right. This approach was not considered stabilized in accordance with the company's stabilized approach criteria, and the situation required a go-around. Instead, the approach was continued. When the crew initiated a go-around, it was too late to avoid the impact with terrain. Unstable approaches continue to be a high risk to safe flight operations in Canada and worldwide.
Flight Safety Foundation research concludedFootnote 172 that 3.5% to 4% of approaches are unstable. Of these, 97% are continued to a landing, with only 3% resulting in a go-around. To put these figures in context, there were, in 2012, 24.4 million flights worldwide in a fleet of civilian, commercial, western-built jet airplanes heavier than 60 000 pounds. This means that between 854 000 and 976 000 of those flights terminated with an unstable approach, and approximately 828 000 to 945 000 continued to a landing. The potential negative consequences of continuing an unstable approach to a landing include controlled flight into terrain (CFIT), runway overruns, landing short of the runway, and tail-strike accidents.
Occurrences in which an unstable approach was a contributing factor demonstrate that the severity can range from no injuries or damage to multiple fatalities and aircraft destruction. In Resolute Bay, the continuation of an unstable approach led to a CFIT accident and the loss of 12 lives. Without improvements in stable approach policy compliance, most unstable approaches will continue to a landing, increasing the risk of CFIT and approach and landing accidents.
In this investigation, the Board examined in detail the defences available to air carriers to mitigate the risks associated with unstable approaches and their consequences. These mainly administrative defences include:
A company stabilized-approach policy, including no-fault go-around policy;
Operationalized stable approach criteria and standard operating procedures (SOPs), including crew phraseology;
Effective crew resource management (CRM), including empowering of first officers to take control in an unsafe situation;
Use of flight data monitoring (FDM) programs to monitor SOP compliance with stabilized approach criteria;
Use of line-oriented safety audits (LOSA) or other means, such as proficiency and line checks, to assess CRM practices and identify crew adaptations of SOPs;
Non-punitive reporting systems (to report occurrences or unsafe practices);
Use of terrain awareness and warning systems (TAWS).
While First Air had some of these defences in place, including a stabilized approach policy and criteria, a no-fault go-around policy, safety management system (SMS) hazard and occurrence reporting, the two-communication rule and an older-generation ground proximity warning system (GPWS), these defences were not robust enough to prevent the continuation of the unstable approach or collision with terrain. Other TSB investigations have shown that non-adherence to company SOPs related to stabilized approaches is not unique to First Air.
In addition, the use of newer-generation TAWS with forward-looking terrain avoidance features will enhance a flight crew's situational awareness and provide increased time for crew reaction. However, if the risk in the system is to be reduced significantly, the industry must take other steps and not rely on purely technological solutions.
The first step is for operators to have practical and explicit policies, criteria, and SOPs for stabilized approach that are enshrined in the company operating culture.
The second step is for companies to have contemporary initial and recurrent CRM training programs delivered by qualified trainers and to monitor and reinforce effective CRM skills in day-to-day flight operations. Effective CRM is a defence against risks present in all phases of flight, including unstable approaches.
The third step involves monitoring of SOP compliance through programs such as flight data monitoring (FDM) and line-oriented safety audits (LOSA). In Canada, TC requires large commercial carriers to have SMS, cockpit voice recorders (CVRs), and flight data recorders (FDRs). However, these carriers are not required to have an FDM program. Even so, many of these operators routinely download their flight data to conduct FDM of normal operations. Air carriers with flight data monitoring programs have used flight data to identify problems such as unstabilized approaches and rushed approaches, exceedance of flap limit speeds, excessive bank angles after take-off, engine over-temperature events, exceedance of recommended speed thresholds, GPWS/TAWS warnings, onset of stall conditions, excessive rates of rotation, glide path excursions, and vertical acceleration.
FDM has been implemented in many countries, and it is widely recognized as a cost-effective tool for improving safety. In the United States and Europe—thanks to ICAO—many carriers have had the program for years. Some helicopter operators have it already, and the Federal Aviation Administration (FAA) has recommended it.
Worldwide, FDM has proven to benefit safety by giving operators the tools to look carefully at individual flights and, ultimately, at the operation of their fleets over time. This review of objective data, especially as an integral and non-punitive component of a company safety management system, has proven beneficial in proactive identification and correction of safety deficiencies and in prevention of accidents.
Current defences against continuing unstable approaches have proven less than adequate. In Canada, while many CAR 705 operators have voluntarily implemented FDM programs, there is no requirement to do so. First Air was not conducting FDM at the time of this accident. Furthermore, FDM programs must specifically look at why unstable approaches are occurring, how crews handle them, whether or not crews comply with company stabilized-approach criteria and procedures, and why crews continue an unstable approach to a landing. Unless further action is taken to reduce the incidence of unstable approaches that continue to a landing, the risk of approach and landing accidents will persist.
Therefore, the Board recommends (A14-01) that:
Transport Canada require CARs Subpart 705 operators to monitor and reduce the incidence of unstable approaches that continue to a landing. Transportation Safety Recommendation A14-01
4.3. Safety concern
4.3.1. Crew resource management training standards
In this accident, the crew became task-saturated during the final approach, and did not maintain a shared situational awareness. As the unstable approach continued, the crew's CRM was ineffective. The first officer made many attempts to communicate his concerns and suggest a go-around. In the absence of clear policies or procedures allowing a first officer to take control, this first officer likely felt inhibited from doing so.
First Air's CRM training program had been approved by TC in accordance with the existing CRM training standard. However, following the accident, TSB investigators attended a First Air initial CRM training course and identified that the actual training delivered did not contain all of the subjects outlined in CASS 725.124(39). The CRM training material was delivered in a period of several hours of one day, along with other subjects. The TC guidance material on which First Air's CRM training was based was intended to be delivered in 2 days. Neither of the company's primary CRM instructors had received any formal facilitator/instructor training or accreditation in teaching CRM.
First Air's initial and recurrent CRM training did not provide the crew of FAB6560 with sufficient practical strategies to assist with decision making and problem solving, communication, and workload management. This investigation found that if initial CRM training does not develop effective CRM skills, and if there is inadequate reinforcement of these skills during recurrent training, flight crews may not adequately manage risk on the flight deck. Furthermore, if operators do not take steps to ensure that flight crews routinely apply effective CRM practices during flight operations, risk to aviation safety will persist.
The investigation also identified a number of crew adaptations of company SOPs evident not only among the accident crew, but also within the Yellowknife B737 crew base, and which First Air's supervisory activities had not detected. SOP adaptations on FAB6560 resulted in ineffective crew communication, escalated workload leading to task saturation, and breakdown in shared situational awareness.
During every flight, pilots must successfully interact with each other, their aircraft, and their environment, using associated checklists and company SOPs to effectively manage threats, errors, or undesired aircraft states that may be encountered. This goal is accomplished by training flight crews to employ a variety of strategies to help improve effectiveness. CRM is a defence against risks present in all phases of flight, including unstable approaches. Some pilots may not adequately manage operational risk as a result of ineffective CRM skills.
There are a variety of CRM standards and regulations in place throughout the world. Despite these differences, there is a general consensus in the aviation community that CRM programs should consist of 3 distinct phases. The first phase is indoctrination and awareness training. The second phase is practice, feedback, and recurrent training. In recent years, there has been increased recognition that CRM training would be more effective if it was integrated with technical training from the earliest stages of the aircrew training regime. CRM training programs that include recurrent training and the actual practice of CRM strategies have been shown to produce significant changes in flight crew performance during line-oriented flight training sessions and during flights. The third phase is continuing reinforcement. An effective method of continual reinforcement is to embed critical CRM skills and behaviours within company SOPs to make CRM an integral part of all training and operations. In summary, the acquisition and maintenance of effective CRM skills depends on receiving contemporary initial and recurrent CRM training delivered by suitably qualified trainers, and ongoing performance monitoring and reinforcement during routine flight operations.
The TSB has previously released a recommendation (A09-02) and issued Findings as to RiskFootnote 173 related to the provision of CRM training to Part VII commercial operators, CRM training standards, and instructor qualifications. In Canada, the current CRM training standard does not incorporate the more modern concepts of threat and error management. There are no experience, training, or qualification requirements needed to teach CRM. In contrast, the United Kingdom Civil Aviation Authority (CAA) has established a series of stringent accreditation requirements for CRM instructors and instructor examiners.
Despite the fact that the CRM regulations in Canada have not been updated to reflect modern CRM concepts, some of these concepts have already been integrated into other TC-led programs. For example, the Advanced Qualification Program, the Approved Check Pilot program, and the Multi-Crew Pilot Licence place considerable emphasis on threat-and-error management concepts and strategies. In addition, each of these programs also highlights the importance of being able to evaluate these skills as part of a proficiency-based training program.
TC has initiated some additional mitigation measures. A focus group consisting of TC and industry representatives met in January 2012 and submitted a final report in February 2012. The report proposed components of a contemporary CRM training standard for Part VII commercial operators but recommended against a set time for CRM course duration and any formal accreditation for CRM instructors. The Civil Aviation Regulatory Committee (CARC) accepted the TC focus group recommendations (see section 1.17.7.3), and on 24 April 2012, directed that a contemporary CRM training regulation and standard should be developed for CAR Subparts 702, 703, 704, and 705.
It is not yet known how detailed TC's new training standard and guidance material will be compared to the existing standard, or when the new standard will come into effect. Nor is it known how TC will ensure that operators apply the new training standard to ensure that flight crews acquire and maintain effective CRM skills.
Therefore, the Board is concerned that, without a comprehensive and integrated approach to CRM by TC and aviation operators, flight crews may not routinely practise effective CRM.
This report concludes the Transportation Safety Board's investigation into this occurrence. Consequently, the Board authorized the release of this report on . It was officially released on .
Appendices
Appendix A – FAB6560 sequence of events
(Please refer to Appendix X – List of acronyms and abbreviations.)
Sequence of events
UTC
Event
1355:53
NAV CANADA ATC issues the following IFR clearance to FAB6560: Cleared to CYRB via the CYZF SID 1 departure, flight planned route, squawk 4625.
1440
FAB6560 departs from CYZF.
1450
FAB6560 enters Northern Domestic Airspace approximately at RIBUN.
1455
FAB6560 flight crew receives CYRB 1450 SPECI from company dispatcher.
1456:51
FAB6560 levels at FL310.
1458:57
Beginning of valid data on FDR
1510
FAB6560 flight crew receives CYRB 1500 METAR from company dispatcher.
1511
Joint flight crew and dispatcher decision for flight to proceed to CYRB
1548:25
FAB6560 turns left from CB to 72°N, 100°45′W.
1609:20
FAB6560 flight crew receives CYRB 160 METAR.
1610:43
Beginning of CVR recording
1614:59
to
1616:24
Pilots discuss loading CYRB RNAV 35T approach into GPS flight plans, selecting ESTAP initial approach fix, and flying direct to MUSAT waypoint.
1615:24
Captain describes his plan to transition onto the localizer using RNAV and then switch over to ILS.
1615:27
FO concurs with captain's plan.
1616:45
Pilots select direct to MUSAT on GPS; FAB6560 turns right to fly direct to MUSAT.
1617:08
CVR begins to record IRB DME Morse code idents, repeated every 32.3 seconds.
1617:11
Captain conducts approach briefing.
1617:41
FO makes comment about high ground speed.
1617:44
Captain states he plans to commence descent 105 miles from CYRB.
1618:40
FO calls CYRB military terminal; does not receive a response.
1622:16
FO calls the NAV CANADA Edmonton ACC, requests descent clearance, does not receive a response.
1622:47
FO calls the NAV CANADA Edmonton ACC, states radio frequency used, does not receive a response.
1623:12
FO calls the NAV CANADA Edmonton ACC, states radio frequency used.
1623:17
NAV CANADA Edmonton ACC responds, instructs FAB6560 to advise when requesting descent.
1623:21
FO advises the NAV CANADA Edmonton ACC that FAB6560 requesting descent.
1623:29
NAV CANADA Edmonton ACC clears FAB6560 to descend out of controlled high-level airspace in vicinity of CYRB, instructs crew to report through FL270.
1623:40
Captain commences descent from FL310.
1623:41
FO reads back descent clearance and acknowledges instruction to report through FL270.
1623:51
NAV CANADA Edmonton ACC advises FAB6560 of military activity in the area and that they can anticipate switching to CYRB military terminal after leaving FL270.
1624:02
FO acknowledges advisory, states frequency for CYRB military terminal.
1624:11
NAV CANADA Edmonton ACC confirms that frequency for CYRB military terminal is correct, advises FAB6560 that CYRB military terminal is controlling airspace FL200 and below, and that airspace between FL270 and FL200 is uncontrolled.
1624:27
Captain calls for pre-descent check.
1624:31
FO makes 2 cabin chimes.
1624:32
FO commences pre-descent check.
1624:37
Captain briefs bugs set for VREF 132 knots for flaps 40.
1624:39
FO briefs bugs set for VREF 132 for flaps 40, calls compass challenge from checklist.
1624:42
Captain responds to compass challenge with “Sync mag cross-check.”
1624:43
FO points out captain stated “mag”.
1624:43
Captain responds with “Sync DG cross-check,” states that he is doing a check and shows “twenty nine true”.
1625:01
Captain queries FO as to his reading.
1625:04
FO responds with “Zero three zero.”
1625:07
No. 2 compass adjusted.
1625:13
FO states “Sync DG cross-checked.”
1625:14
FO calls pre-descent complete.
1626:03
FO calls NAV CANADA Edmonton ACC, reports through FL260.
1626:11
NAV CANADA Edmonton ACC acknowledges, instructs FAB6560 to contact CYRB military terminal.
1626:27
FO makes initial call to CYRB military terminal.
1626:42
CYRB military terminal responds to call, requests that aircraft calling repeat transmission.
1626:46
FO repeats call to CYRB military terminal.
1627:01
CYRB military terminal responds.
1627:09
FO calls CYRB military terminal, advises that reception poor and they will call closer to CYRB. Provides CYRB ETA 1643 and advises planning Runway 35.
1627:35
CYRB military terminal acknowledges transmission, instructs FAB6560 to try again in a few miles when communication will be better.
1628:43
Captain advises FO that they are descending through FL200.
1628:49
Captain states altimeter setting 29.81.
1629:21
FO advises CYRB company base that their ETA for the ramp is 1645 and that they will need fuel.
1629:49
FO calls CYRB military terminal.
1629:57
CYRB military terminal responds.
1630:02
FO queries CYRB military terminal as to whether they received FAB6560 ETA and planned runway.
1630:09
CYRB military terminal advises FAB6560 that they received the previous information and that military terminal control unit is not operational and providing only clearance delivery.
1630:11
CYRB military terminal provides traffic information about a second flight 50 miles southeast of CYRB at 10 000 feet inbound to CYRB.
1630:15
CYRB military terminal instructs FAB6560 to contact CYRB military tower.
1630:31
FO acknowledges traffic and instruction to contact CYRB military tower.
1630:50
FO calls CYRB military tower.
1630:56
CYRB military tower responds, provides altimeter setting 29.81.
1631:45
CYRB military tower instructs FAB6560 to report final for Runway 35T, advises wind estimated 160° at 10 knots.
1631:53
FO requests CYRB runway condition report from CYRB military tower.
1632:01
CYRB military tower advises FAB6560 that the runway is a little wet, and no other aircraft have used it during the morning.
1632:07
FO acknowledges runway condition report.
1632:35
FAB6560 descends through 10 000 feet.
1632:46
Captain calls for in-range check.
1632:48
FO verbalizes: seatbelt signs on, anti-ice on, gravel protect on, air conditioning and pressurization set for landing.
1633:09
Captain instructs FO to hold the remaining items on the checklist.
1633:14
One of the pilots calls through 10 000 feet.
1636:23
Captain instructs FO to continue in-range check below the line.
1636:33
FO calls NAV instruments.
1636:35
Captain responds “VHF NAV.”
1636:38
FO responds “VHF NAV.”
1637:00
FO calls in-range check complete.
1637:25
Captain calls for flaps 1.
1637:40
FO calls flaps 1, green light.
1637:42
Captain calls flaps 5 landing check.
1637:47
FO calls flaps 5 selected.
1637:51
FO acknowledges landing check call and initiates landing check.
1637:53
Two cabin chimes
1638:05
FO states landing check done to gear and flaps.
1638:20
FO calls localizer alive.
1638:21
FAB6560 begins left turn.
1638:25
FO calls glideslope alive.
1638:32
FO advises CYRB military tower that FAB6560 is 10 miles final for 35.
1638:38
Captain calls for gear down.
1638:39
CYRB military tower instructs FAB6560 to report 3 miles final.
1638:42
Captain calls for flaps 15.
1638:46
FO requests that CYRB military tower repeat previous transmission.
1638:48
FO calls gear down, 3 green.
1638:49
to
1638:57
Control wheel movements occur.
1638:49
CYRB military tower instructs FAB6560 to report 3 miles final.
1638:53
FO acknowledges instruction.
1638:55
FO calls flaps 15, green light.
1639:05
FAB6560 rolls wings-level.
1639:10
Altitude alerter tone at 320 feet asl
1639:13
to
1639:30
FO makes 5 statements regarding aircraft lateral displacement from desired track.
1639:18
Control wheel movement occurs.
1639:33
to
1639:37
Captain makes 2 statements indicating satisfaction that autopilot is tracking properly.
1639:36
Control wheel movement occurs.
1639:46
FO makes statement about track deviation displayed on GPS.
1639:49
KBA909 advises CYRB military tower that they plan BCRS 17T in 5 minutes.
1639:52
Altitude alerter tone at 1950 feet asl
1639:57
FO states they are not on auto approach, just on the flight director.
1640:04
Thrust begins to increase from idle to 1.4 EPR.
1640:07
FO queries captain to confirm full deflection.
1640:08
Captain concurs, and questions why full deflection when they are on the localizer.
1640:11
FO states they are not on the localizer.
1640:14
Captain states “It's captured; ten three is the localizer?”
1640:17
FO disagrees on localizer capture and reminds captain about the hill to the right of the runway.
1640:23
FO states GPS is also showing to the right.
1640:25
FO questions captain as to whether they did something wrong.
1640:30
FO states opinion that they should abandon the approach and then solve the navigational problem.
1640:33
Captain indicates that he plans to continue the approach.
1640:35
FO acknowledges captain's plan to continue the approach.
1640:36
FAB6560 descends through 1000 feet above field elevation. Stabilized approach criteria become applicable.
1640:41
FO states, “We're 3 mile final; we're not configged.”
1640:45
Captain calls for flaps 25.
1640:49
FO reports full deflection on the GPS too.
1640:52
FO recommends corrective action—go left.
1640:54
Captain indicates that he can't go left.
1640:55
KBA909 enters CYRB Class D control zone from southeast.
1640:56
FO begins to make advisory statement regarding track.
1640:57
Captain interrupts FO statement by calling for flaps 30.
1640:59
to
1641:08.3
Captain and FO discuss configuration and displays of flight director, GPS, and autopilot.
1641:05
Thrust begins to increase from about 1.08 EPR to 1.47 EPR.
1641:08.3
FO states “So let's just …”
1641:08.7
Captain interrupts FO statement by calling for flaps 40.
1641:10.1
FO calls green light, gear down, 3 green.
1641:11.2
Captain calls flaps 40, green light.
1641:16.3
Captain makes statement indicating similar situation happened to another pilot previously.
1641:18
Pitch begins to decrease from +2° to −4.8°.
1641:26.3
Captain makes statement regarding presence of the glideslope indicator.
1641:28.3
FO states glideslope is fully deflected.
1641:30.8
FO advises CYRB military tower that FAB6560 is 3 final.
1641:33.1
CYRB military tower advises that wind is estimated 150° at 7 knots, clears FAB6560 to land Runway 35T.
1641:39.4
FO makes incomplete transmission to CYRB military tower.
1641:41.1
FO states “Just over the shoreline.”
1641:43.2
FO utters expletive.
1641:46
Pitch begins to increase from −5°.
1641:46.6
FO calls captain by first name, states “I don't like this.”
1641:47.1
CYRB military tower requests that FAB6560 repeat last transmission.
1641:47.7
GPWS: “Sink rate”
1641:49.0
FO states “Go for it.”
1641:49.2
GPWS: “Minimums”
1641:50.1
FO states “Go around.”
1641:50.7
GPWS: “Minimums”
1641:51.2
Captain calls “Go-around thrust.”
1641:51.8
FAB6560 collides with terrain.
Appendix B – Approach procedure chart for instrument approach based on area navigation using global navigation satellite at Runway 35 TRUE
From NAV CANADA, Canada Air Pilot (CAP), CAP 1: Yukon, Northwest Territories and Nunavut (effective 30 June 2011)
Appendix E – C-GNWN compass systems: additional information
Compass transfer switch
In the event of a compass failure, use of the compass transfer switch enables the remaining compass to provide heading information to both pilot's instruments. This switch is located on the captain's side of the overhead panel, adjacent to the VHF NAV (very high frequency navigation) selector switch.
C-GNWN compass system heading distribution
With the compass transfer switch in the NORMAL position, heading information distribution is as follows:
Heading information from no. 1 directional gyro (DG) is displayed on the captain's radio-magnetic indicator (RMI), which then repeats this information to the first officer's (FO's) horizontal situation indicator (HSI) and to the VHF navigation system. The information supplied by no. 1 DG through the captain's RMI controls the FO's HSI heading display and the “set course” and “set heading” signals. The set-course and set-heading signals are then fed to the flight director's steering computer 2.
Heading information from no. 2 DG is displayed on the FO's RMI, which then repeats this information to the captain's HSI and to the flight data recorder. The information supplied through no. 2 DG through the FO's RMI controls the display on the captain's HSI heading display, and is also used by the captain's HSI for the set-course and set-heading signals. The set-course and set-heading signals are then fed to the autopilot and to the flight director's steering computer 1.
Flux valve and compass controller
Flux valves sense the direction of the earth's magnetic field. With the compass controller (Figure 20) MAG/DG switch in the MAG (magnetic) position, the flux valves are used to align the DG output with magnetic north and provide a stable magnetic compass system. In this mode, the compass system compensates for real and apparent gyro precession.
However, in the vicinity of the earth's magnetic poles, magnetic compass systems are susceptible to error and are not suitable for navigation. When operating in these areas of compass unreliability, alternate methods of navigation must be used. These methods include operating the aircraft's DGs in a free gyro mode with reference to true rather than magnetic north.
With the MAG/DG switch in the DG position, the flux valve input is removed from the C-11B compass system. The DG heading output is no longer slaved to magnetic north, and the compass system reverts to a free gyro. In free gyro mode, the system is subject to the real and apparent precession of the DG.
The compass controller includes an adjustable latitude compensator. To neutralize earth rate precession, pilots must set the correct latitude on this compensator as the flight progresses. The compass controller also has a latitude transfer switch to adjust dependent on whether the aircraft is flying in the northern or southern hemisphere.
Instrument comparator
An instrument warning system is installed which compares the captain's and FO's compass headings, pitch and roll attitude indications, and localizer and glideslope deviation outputs from the no. 1 and no. 2 VHF NAV units. An instrument comparator annunciator (Photo 6) is located above each pilot's instrument display.
For heading information, the comparator will illuminate amber lights on both annunciators when the difference between the no. 1 and no. 2 compasses exceeds the following tolerances:
The upper right knob on each RMI is the compass synchronizing control, which permits the pilot to synchronize the RMI with the applicable compass system (Figure 21).
The HSI displays aircraft position and heading with respect to magnetic or true north, selected heading, DME (distance measuring equipment), lateral deviation to or from a selected VOR (VHF omnidirectional range) or localizer course, and vertical deviation from the centre of a glideslope beam (Figure 22).
The fixed aircraft symbol displays aircraft position and heading in relation to the azimuth card, course deviation bar, and selected heading. The rotating azimuth card displays heading information from the compass system. Aircraft heading is read on the card beneath the lubber line at the top centre of the instrument.
The heading bug is set to the desired heading on the azimuth card. Once set, the heading bug rotates with the azimuth card. The course pointer is set to the desired VOR radial or localizer course on the azimuth card. Once set, the course pointer rotates with the azimuth card.
The course deviation bar represents the centre of the selected VOR or localizer course, and displays course deviation. The course deviation bar is read with respect to the aircraft reference symbol, providing the pilot with information regarding lateral deviation from the selected course and which direction to turn for corrections to course deviations.
When the navigation receiver is tuned to a localizer frequency, initial movement of the course deviation bar begins at angular deviations from 2.4° to 4.0° from the centre of the localizer course, depending on beam width for a particular instrument landing system (ILS) installation. The 2-dot linear portion of the course deviation scale represents 2.5° angular deviation, depending on the particular ILS installation.Footnote 175
Appendix F – C-GNWN autopilot system: additional information
Autopilot mode control panel
The autopilot has 2 channels: 1 pitch channel and 1 roll channel. The pitch and roll functions are separate and are housed in separate analog electronic boxes in the electronics bay.
Autopilot engage switches
The autopilot mode control panel (AP MCP) has 2 engage paddle switches: 1 for the roll channel and 1 for the pitch channel (Photo 7). Each paddle switch is spring-loaded to the disengage position, and is solenoid-held in the engaged position when certain conditions are met. The pitch and roll channels may be operated independently of one another. The default engage state is manual CWS (control wheel steering) mode for both pitch and roll. The aircraft will maintain the pitch attitude at the time of engagement. Automatic stabilizer trim, which is a function of the pitch channel, compensates for changes in aircraft trim.
The autopilot pitch mode selector is a rotary switch located on the right side of the AP MCP, with 3 positions: TURB, OFF, and ALT HOLD. The switch is spring-loaded to the OFF position, and is solenoid-held in the other positions if system interlocks are maintained. Each of the pitch submodes is described below.
OFF − operates in manual pitch CWS.
TURB − for use in turbulent conditions to reduce gust loads.
ALT HOLD − maintains the pressure altitude on the captain’s altimeter at the time this mode is selected.
Autopilot mode selector
The autopilot mode selector is a rotary switch located on the left side of the AP MCP, with 4 positions: MAN, VOR/LOC, AUTO APP and MAN G/S. The switch is spring-loaded to the MAN position and is solenoid-held in the 3 other positions if system interlocks are maintained. When the roll channel changes mode from these 3 positions, the switch will automatically return to the MAN position. Exceeding the CWS high detent force after VOR or localizer ON COURSE will also cause the switch to revert to the MAN position.
Each of the autopilot modes is described below:
MAN − The autopilot operates in manual roll CWS and is used in conjunction with the HDG select switch to achieve the following roll submodes: HDG HOLD, HDG SEL, and HDG OFF. Operation of each of these submodes is described further below, under Autopilot Heading Switch.
VOR/LOC − The autopilot uses the VOR (VHF omnidirectional range) or LOC (localizer) signal selected on the NAV radio to control the roll channel, and will automatically intercept and track LOC or VOR. The captain’s HSI is used to select heading and course. Crosswind compensation occurs after ON COURSE.
AUTO APP − The autopilot uses the instrument landing system (ILS) selected on the NAV radio and will automatically capture and track both localizer (roll channel) and glideslope (pitch channel).
MAN G/S (manual glideslope) − The autopilot uses the ILS selected on the NAV radio and will automatically capture and track localizer (roll channel). This mode is used to manually capture G/S using pitch CWS from above or to recapture after autopilot disengagement. When selected, the airplane pitches down for 10 seconds (700 feet per minute), then tracks G/S.
Autopilot heading switch
The heading switch has 3 positions. The switch is spring-loaded to the centre position (HDG HOLD), and is solenoid-held in the up (HDG OFF) and down (HDG SEL) positions if system interlocks are maintained. Each of the heading submodes is described below:
HDG OFF – Heading off submode is used when autopilot is in roll CWS mode. It maintains any bank attitude within limits.
HDG HOLD − Heading hold submode is obtained when the roll axis is engaged at a bank angle of less than 5°, or any time the navigation mode is selected in MANUAL position, the heading select switch is in centre position (HDG HOLD), CWS input is zero, and the bank angle is less than 5°. If a CWS roll input in excess of the detent force is made, the aircraft will roll in the direction of the force at a rate proportional to the force. When the CWS force is released, aircraft response depends on bank angle at the time of release. If the bank angle is less than 5°, the aircraft will roll wings-level and maintain heading; if the bank angle is greater than 5°, the aircraft will maintain bank angle.
HDG SEL – Heading select submode uses the selected heading data from the HDG bug on the captain’s HSI. It places the autopilot roll channel in high detent. If high detent force is exceeded, the switch will trip to centre position. In VOR/LOC mode, the switch will trip to HDG HOLD position once the selected course is captured.
Control wheel steering
The aircraft operations manual (AOM) Volume 2 describes CWS as follows:Footnote 176
CWS operates in low or high detent level, depending on which modes or submodes are active:
MAN Mode
CWS pitch and roll are low detent unless various submodes are active (see below)
VOR/LOC Mode
CWS pitch and roll are low detent until VOR or localizer ON COURSE. CWS roll then becomes high detent, and CWS pitch remains low detent unless ALT HOLD is active. CWS roll may be used to override during the capture phase until ON COURSE. Exceeding high detent in roll reverts the autopilot to MAN.
[…]
ALT HOLD Submode
CWS pitch is high detent. Exceeding high detent will revert the Pitch Mode Selector Switch to OFF.
HDG HOLD/HDG OFF Submodes
CWS roll is low detent.
HDG SEL Submode
CWS roll is high detent. Exceeding high detent causes the heading switch to move to the center (HEADING HOLD) position.
Appendix H – FD-108 flight director system: additional information
Flight director mode control panel
There were 2 flight director (FD) mode control panels (MCPs) installed on the glareshield: one for the captain's FD system and the other for the FO's FD system. Each FD MCP contains controls for the roll channel and the pitch channel via a MODE SEL (mode selection) switch, ALT HOLD (altitude hold) switch, and PITCH CMD (pitch command) knob (Photo 8). The roll and pitch controls select the signals provided to the command bars in the attitude director indicator (ADI).
The command bars in the ADI display the computed commands to maintain the selected roll angle. The FD roll MODE SEL switch has the following positions and operating limitations:
GA (go around) provides wings-level roll command with 14° pitch command until another mode is selected.
OFF removes the command bars from ADI.
HDG provides command bar guidance to fly the selected heading on the HSI. In HDG mode, the steering command is limited to 30° in roll and 12° in pitch.
VOR/LOC is used to capture and track a VOR radial or localizer. VOR/LOC has 3 submodes:
Intercept – Amber APD (approach progress display) VOR/LOC light illuminated, command bars provide guidance to fly to and maintain the selected heading on the HSI.
Capture – Green APD VOR/LOC light illuminated, command bars provide guidance to fly to and maintain the VOR radial or localizer course selected on the HSI. This guidance is displayed in the form of commanded bank angles. The command bars return to wings-level once the FD determines the resultant heading provides a sufficient intercept angle to the selected course. For localizer, this mode change occurs at 2.5° from localizer centreline. Bank angle command limit is ±30°.
On course – Green APD VOR/LOC light illuminated, command bars provide guidance to maintain the VOR radial or localizer course selected on the HSI. Bank angle command limit is ±8° and roll rate limit is 7° per second.
AUTO APP includes VOR LOC mode with the addition of a pitch command providing vertical guidance to fly to and maintain the glideslope.
MAN GS is used to manually capture glideslope. Automatic sensing of glideslope signal is disabled.
Flight director mode control – pitch
The command bars in the ADI display the computed commands to maintain the selected pitch angle. The MCP has the following pitch controls:
Altitude Hold switch – ON/OFF
PITCH CMD knob selects a fixed pitch angle for climb or descent within the range −10° to +15°
When the FD MCP roll switch is in AUTO APP, the glideslope signal is used to control pitch.
Approach progress display annunciators
The APDs provide annunciation of the autopilot and flight director systems armed and capture status for different operating modes. Each APD has 1 column of annunciators on the left side for the flight director and a second column on the right for the autopilot. The APDs were modified from the original configuration to include a GPS annunciator at the bottom of the autopilot column (Figure 24).
The 2 APDs will not necessarily display the exact same annunciations at all times because they are each connected to separate systems and are displaying information from different sources. For example, it is possible that the captain's FD APD shows VOR/LOC as green when the FO's FD APD shows VOR/LOC as amber because one system may have captured the localizer beam whereas the second receiver has not yet captured due to slight variations in the sensitivities of the equipment.
FD modes are annunciated on the left side of the APD. On the accident aircraft, the following APD annunciators were applicable to the FD system:
VOR/LOC
Illuminates amber when VOR/LOC or AUTO APP mode is selected on the FD MCP
Illuminates green when VOR or LOC signal is captured (less than 2.5° from localizer centreline)
GLIDE SLOPE
Illuminates amber when AUTO APP mode is selected on the FD MCP
Illuminates green when glideslope signal is captured (less than 2 dots)
GO AROUND
Illuminates green when GA mode is selected.
Autopilot modes are annunciated on the right side of the APD. On the accident aircraft, the following APD annunciators were applicable to the autopilot:
VOR/LOC
Illuminates amber when VOR/LOC or AUTO APP selected on the MCP and VOR or LOC not captured
Illuminates green when VOR/LOC or AUTO APP selected on the MCP and VOR or LOC signal is captured (less than 2 dots)
GLIDE SLOPE
Illuminates amber when AUTO APP mode is selected on the MCP and glideslope not captured
Illuminates green when AUTO APP mode is selected on the MCP and glideslope signal is captured (less than 2 dots)
Illuminates green if MAN G/S selected on the MCP
If illuminated green, changes to amber if the aircraft localizer deviation exceeds 2 dots
GPS
Illuminates green when both MD-41 annunciator control unit no. 1 is selected to GPS and the GPS autopilot select switch is set to A/P ON GPS
Extinguishes if either of these switches is deselected
NOTE: Given that the aircraft left the localizer beam, the results obtained from the glideslope calculation are mathematical, were used for illustrative purposes only, and may not be what the aircraft instruments would have shown, as the aircraft may not have been within receiving range of the antenna’s signal.
Appendix Q – First Air procedures for autopilot operation in MAN mode
First Air procedures for autopilot operation in MAN mode are as follows in the flight operations manual:Footnote 178
To Maneuver in Pitch and Roll
Use CWS at a force greater than low detent level. When CWS pitch force is relaxed below low detent level, airplane will maintain existing pitch attitude. When CWS roll force is relaxed below low detent level, if bank angle less than 5°, airplane will roll wings level and maintain heading. If bank angle greater than 5°, airplane will maintain bank angle.
To Maintain Bank Angles Less than 5°
Autopilot Heading Switch ·································································································· HDG OFF
When CWS roll force is relaxed below low detent level, the airplane maintains the existing bank angle. Return the Autopilot Heading Switch to center to remove this submode.
To Maneuver in Roll and Hold Altitude
Pitch Mode Selector ········································································································ ALT HOLD
Use CWS to induce roll at low detent level force. Altitude is maintained by input from the air data computer at the time Pitch Mode Selector is positioned to ALT HOLD position. CWS pitch input greater than high detent level will trip Pitch Mode Selector to OFF.
To Maneuver In Pitch and Hold Heading
Autopilot Heading Switch ···································································································· HDG SEL
Use CWS to control pitch attitude at low detent level. The airplane turns to and maintains the heading selected on HSI with the Autopilot Heading Switch in HDG SEL. CWS roll input greater than high detent level trips the Autopilot Heading Switch to the centre position.
Appendix R – Instrument landing system intercept for autopilot VOR/LOC mode
Instrument landing system intercept for autopilot VOR/LOC mode
Appendix T – First Air compass operating policy and procedures for Northern Domestic Airspace
Policy for operations in Northern Domestic Airspace
First Air's policy for Northern Domestic Airspace (NDA) operations is stated as follows in the flight operations manual:Footnote 179
Navigation in Northern Domestic Airspace: Routes and approach procedures conducted in Northern Domestic Airspace are published degrees true.
Crews must navigate in accordance with the regulations and operating procedures outlined in this manual.
Crews will identify their tracks as “true” when broadcasting required MF [mandatory frequency] reports in uncontrolled airspace.
Be aware that other aircraft may or may not be adhering to the required operating practice.
Canadian Aviation Regulations require aircraft operating in Northern Domestic Airspace to be equipped with a means of establishing direction that is not dependant on a magnetic source. Even though First Air Aircraft are equipped with GPS, this alone is not capable of establishing direction.
There are only 2 reliable means of establishing direction. These are:
Use of GPS in combination with an ADF/NDB bearing; or, where this is not possible; and
Use of an Astro Compass and Air Almanac to obtain a sun/star shot.
Note: Use of the Astro Compass /Air Almanac should only be necessary when in an area without sufficient NDB coverage or when both GPS (one in HS748) are unserviceable.
Procedures for obtaining true heading using GPS and non-directional beacon
The aircraft operations manual provides specific procedural guidance to B737 crews for operation of the compass and navigational systems. The manual advises, “When operating in TRUE it is recommended that verification of TRUE heading be accomplished over each waypoint, before descent, and whenever verification is considered appropriate,”Footnote 180 and “Comparing GPS data to RMI ADF indication can be used to set true heading but this may not be as accurate as using the astrocompass.”Footnote 181 The procedures for obtaining true heading using GPS and NDB are as follows:Footnote 182
Tune NDB, ensure strong signal and steady RMI ADF indication,
Key in NDB identifier on lower line display or use nearest function,
Ensure compass MAG/DG switch is DG,
Observe GPS BRG/D data, if BRG is not TRUE, select AUX FUNCTIONS (MSG then “↑” key), DISPLAY OPT and select TRUE.
Slew compass so the head of the ADF needle points to GPS displayed bearing to the NDB.
Note: The compass heading will correspond to present longitude
The procedure description identifies that use of an NDB and ADF to obtain bearings is less accurate than use of an astro compass because of various factors that can reduce non-directional beacon (NDB)/ automatic direction finding (ADF) accuracy.
Appendix U – First Air amplified checklist procedures
Amplified pre-descent checklist
The amplified pre-descent checklist provided in First Air's aircraft operations manual (AOM) is as follows:Footnote 183
Landing Data & Briefing ····································································· REVIEWED, BUGS SET PF/PNF
Complete the landing data card, conduct crew and approach plate briefings and set all bugs for landing.
EPR & IAS Bugs ············································································ CHECKED & SET VREF___ PF/PNF
Verify the airspeed index markers and the EPR cursors are set to the landing data card values.
Compasses ·········································································· SYNC, MAG/DG & X CHECKED PF/PNF
Verify all compass systems have been checked, are synchronized and have been cross-checked. Verify that compass systems are in MAG. (Magnetic or Slaved Position) or DG (free Gyro).
NOTE: 10,000 feet - Landing/Turnoff lights On.
During Daylight operations, the Runway Turnoff and Inboard Landing lights should be on pulse mode.
Use of outboard landing lights are at the Captain's discretion. Due to the increased drag and fuel burn, their use should be limited to the traffic pattern at night and/or to speeds below 250 knots.
During night or obscured weather operations, Turnoff, Inboard and Outboard Landing Lights should be used for landing. The Inboard and Outboard Landing Lights should be turned on no later than the FAF.
Amplified in-range checklist
Items above the dashed line are normally accomplished descending through 10 000 feet, and items below the dashed line are accomplished after navigational aids and flight directors have been set up, as briefed, for the intended approach.
The amplified in-range checklist provided in the AOM is as follows:Footnote 184
Seat Belt ························································································································ ON PNF
Gravel Protect Switch ········································································································ ON PNF
Air Cond & Pressurization ············································································ SET FOR LANDING PNF
Check cabin temperature normal. If landing airport temperature is higher or lower than normal, cabin should be pre-conditioned on descent to maintain appropriate cabin temperatures on the ground.
Check that the OFF SCHED DESCENT annunciator is extinguished.
Check that the cabin is descending to the arrival airport elevation.
The PNF will press and release the annunciator panel. Check that the annunciator panel lights and MASTER CAUTION lights illuminate. No lights should remain illuminated when the annunciator is released.
Speed Brake ·············································································· ARMED, GREEN LIGHT PF
Raise lever, move slightly aft to DETENT (ARM) position and observe SPEEDBRAKE ARMED annunciator illuminated.
If the amber SPEEDBRAKE DO NOT ARM light illuminates, or the green SPEEDBRAKE ARMED light does not illuminate, return the lever to DETENT and manually deploy the ground spoilers after touchdown.
Gear ································································································· DOWN, 3 GREEN PF/PNF
Verify the landing gear lever is positioned down and the 3 green landing gear down and locked indicator lights are illuminated.
Flaps ······························································································· ___ GREEN LIGHT PF/PNF
Ensure flap indication agrees with required landing flap.
Appendix V – Additional standard operating procedures and adaptations by First Air crews
Transfer of control
The aircraft operations manual (AOM) describes the company's transfer of control procedure as follows:Footnote 186
When transferring control of the aircraft, the PFFootnote 187 will state “Your Controls”. The PNF will state “My Controls” and assume PF duties. The PNF will grasp the control column prior to announcing “My Controls” if the auto-pilot is not engaged at time of control transfer.
Pilot interviews revealed that compliance with this procedure was generally good, although adaptations sometimes did occur during cruise, with hand signals or a tap on the control wheel used to signify the transfer of control. During flight FAB6560, a transfer of control occurred during cruise, but there were no verbal statements regarding the control transfers.
Landing data card and airspeed bug settings
The landing data card (Figure 25) is used to set and verify landing data. It is normally completed by the PNF before the normal pre-descent procedures. Normally, the PNF will review the landing data card information after the airspeed bugs are set and before the approach briefing.
First Air standard operating procedure for the B737 is to fly the recommended final approach speed (VAPP), which is VREF corrected for wind. Wind correction is ½ the steady headwind component plus all of the gust value, based on tower-reported winds. The maximum wind correction should not exceed 20 knots. This wind correction is added to the VREF. In light wind or tailwind conditions, a minimum of 5 knots is added to the VREF to obtain the VAPP.
Recommended airspeed marker (bug) settings are described in Figure 26. According to the AOM:Footnote 189
After the aircraft has been configured for landing with the gear down and landing flap. [sic] All airspeed callouts will be referenced to the airspeed internal Bug (“The Bug”) E.g. “Bug +5 or Bug −5”.
One External Bug at 210 knots ························································· Flaps UP manoeuvring speed
Altitude callouts
Standard altitude callouts are to be made when leaving one altitude for another, and at each 10000-foot interval. When leaving one altitude for another, the PF is required to call out “Out of (altitude) for (altitude)”, and the PNF responds with “Check.” At each 10 000-foot interval, the PNF is required to call out “(altitude) for (assigned altitude)”.
Pilot interviews revealed variable compliance with these callouts. Pilots reported using non-standard phraseology, and hand signals were sometimes used when the radios were in use.
Neither FAB6560 pilot made any verbal altitude callout when commencing descent from FL310 at 1623:40. There was no callout at FL300. At 1628:43, the captain made a non-standard altitude callout through FL200, but did not specify the altitude he was descending to. This call was made 4 seconds after the flight descended through FL200. At 1633:14, one of the pilots made a non-standard altitude callout through 10 000 feet, but did not specify the altitude he was descending to. This call was made 39 seconds after the flight descended through 10 000 feet.
Descent transition
FAB6560 was operating in the Standard Pressure Region from cruise altitude down to ground level. In the Standard Pressure Region, the altimeter shall be set to the current altimeter setting of the aerodrome of intended landing before commencing descent with the intention to land. In the southern portion of the country, altimeters would be set to the current altimeter setting as the flight entered the altimeter setting region descending through FL180.Footnote 192
The transition scan/flow is initiated when descending through transition level. Required items are resetting the captain's, FO's, and standby altimeters and the air conditioning panel baro subscale to local altimeter setting. The PNF standard callout for transition level is “Transition level altimeters reset ___ in”. There was no discussion of altimeter settings recorded before or during the descent of FAB6560 until 1628:49, when the captain stated the current altimeter setting for CYRB as 29.81 in. Hg. At this time, the flight was descending through FL196. The PNF did not use the required phraseology for transition level.
Communications radios
Pilots are required to advise the other pilot when not monitoring the primary radio. The other pilot will acknowledge this information and maintain a listening watch. When the pilot begins monitoring again, they shall be advised of changes to cleared routing and changes to the primary VHF radio.
Pilot interviews revealed that compliance with this procedure was generally good, although sometimes hand signals were used during high workload situations. During flight FAB6560, the FO verbally transferred the radios to and from the captain before and after conducting the passenger public address (PA) briefing at 1621:06. At 1628:37, when the FO switched to another radio to call the company's base at CYRB, there was no verbal transfer of the other radio before or after the communication.
15 000-foot and 10 000-foot scan/flow
The 15 000-foot scan/flow is initiated when descending through 15 000 feet. The only action item is for the PNF to start the APU (auxiliary power unit) if a BLEEDS OFF landing is anticipated. FAB6560 descended through 15 000 feet at 1630:16. There were no recorded statements regarding starting the APU.
The 10 000-foot scan/flow is initiated when descending through 10 000 feet. Action items are executed by the PNF as follows:Footnote 193
Logo Light ···································································································· ON
Gasper Fan ·································································································· ON
Air Cond & Pressurization ························································· SET FOR LANDING
If required, configure the pressurization system for Engine Bleeds OFF for landing.Footnote 194 Ensure that the APU has been operating for at least 60 seconds before completing this procedure.
Right Pack Switch ···································································································· ON
Left Pack Switch ······································································································ ON
Number 1 Engine Bleed Switch ·················································································· OFF
APU Bleed Switch ···································································································· ON
Number 2 Engine Bleed Switch ·················································································· OFF
Seat Belt Sign ························································································································ ON
Gravel Protect Switch (if installed) ······························································································ ON
Landing Lights ······································································································· AS REQUIRED
FAB6560 descended through 10 000 feet at 1632:35. At the commencement of the in-range check at 1632:48, the FO confirmed the seatbelt signs ON, gravel protect ON, and air conditioning pressurization set for landing. This confirmation indicates that the 10 000 foot scan/flow had been completed.
Available information does not clearly indicate whether the pilots started the APU. However, they turned on the gravel protect switch, indicating that they were aware of the gravel operating requirements. It is likely that they did start and use the APU.
Altitude alerter
The PNF will acknowledge all altitude assignments with ATC and repeat them aloud to the PF. All assigned altitudes down to the altitude at the final approach fix (FAF) will be preselected on the altitude alerter. On glideslope capture, the altitude alerter will be preset to the missed approach altitude. There was no requirement for pilots to acknowledge aural or visual altitude alerts.
Pilots interviewed were asked only about acknowledgment of aural altitude alerts below the selected altitude while on final approach. They indicated that such aural alerts were acknowledged by advising the other pilot that the altitude alerter was set to the missed approach altitude.
On FAB6560, the PNF did not repeat aloud the intended altitude when initially receiving the descent clearance from ATC at 1623:29. There were no altitude alerter tones recorded until the aircraft descended through 3200 feet at 1639:10, which was consistent with the altitude alerter being set to 2200 feet. A subsequent alert occurred at 1639:52, when the aircraft was descending through about 1950 feet asl.
Appendix W − NOTAMS
Initial NOTAMFootnote 195 to establish the Class D MTCA and Control Zone, issued 02 August 2011:
Issued 02 August 2011 at 1730Z:
PNS0506 02173032 GG CYZZOZEG 021730 CYHQYNYX
111404 NOTAMN CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE MTCA IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 80 NM RADIUS 744301N 945810W
700 FT AGL TO FL200. FOR OPS NANOOK.
FREQ FOR OPS NANOOK:
RESOLUTE TML: 228.5000 MHZ
: 123.075 MHZ
GLOWWORM (MIL PAR): 243.4000 MHZ
: 128.850 MHZ
RESOLUTE TWR: 236.5000 MHZ
: 123.325 MHZ
RESOLUTE GND: 249.9000 MHZ
: 128.975 MHZ
: 149.150 MHZ
1108061200 TIL 1108280100
Issued 02 August 2011 at 1735Z:
PNS0512 02173523 GG CYZZOZEG 021735 CYHQYNYX
111405 NOTAMN CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108061200 TIL 1108280100
Revised NOTAM to establish the Class D MTCA and Control Zone, issued 04 August 2011:
Issued 04 August 2011 at 2000Z:
PNS0636 04200001 GG CYZZOZEG 041959 CYEGYFYX
111424 NOTAMR 111404 CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE MTCA IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 80 NM RADIUS 744301N 945810W
700 FT AGL TO FL200. FOR OPS NANOOK.
FREQ FOR OPS NANOOK:
RESOLUTE TML: 228.5000 MHZ
: 123.075 MHZ
GLOWWORM(MIL PAR): 243.4000 MHZ
: 128.850 MHZ
RESOLUTE TWR: 236.5000 MHZ
: 123.325 MHZ
RESOLUTE GND: 249.9000 MHZ
: 128.975 MHZ
: 149.150 MHZ
1108101300 TIL 1108280100
. . . .
Issued 04 August 2011 at 2006Z:
PNS0644 04200613 GG CYZZOZEG 042006 CYEGYFYX
111425 NOTAMR 111405 CZEG EDMONTON FIR
CZEG DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108101300 TIL 1108280100
Revised NOTAM to establish the Class D Control Zone, issued 12 August 2011:
Issued 12 August 2011 at 2331Z:
PNS0810 12233157 GG CYZZOYRB 122331 CYHQYNYX
110102 NOTAMN CYRB RESULUTE BAY
CYRB DAH IS AMENDED AS FLW:
CLASS D RESOLUTE CTL ZONE IS ESTABLISHED AS FLW:
THE AIRSPACE WITHIN 10 NM RADIUS 744301N 945810W
SFC TO 6000 FT MSL. FOR OPS NANOOK
1108101300 TIL 1108280100
Appendix X – List of acronyms and abbreviations
8ACCS
8 Air Control and Communications Squadron
ACC
area control centre
AD
airworthiness directive
ADF
automatic direction finding
ADF
automatic direction finding
ADI
attitude director indicator
agl
above ground level
ALT HOLD
altitude hold
AOM
aircraft operations manual
AP
autopilot (switch referred to as A/P)
APD
approach progress display
APU
auxiliary power unit
ARFF
aircraft rescue and firefighting
asl
above sea level
ASR
area surveillance radar
ATC
air traffic control
ATC MANOPS
air traffic control manual of operations
ATIS
automated terminal information system
ATV
all-terrain vehicle
AUTO APP
auto approach
AWWS
aviation weather Web site
BCRS
back course
°C
degrees centigrade
CAA
United Kingdom Civil Aviation Authority
CADORS
Civil Aviation Daily Occurrence Reporting System
CAR
Canadian Aviation Regulations
CARC
Civil Aviation Regulatory Committee
CARS
community aerodrome radio station
CASS
Commercial Air Service Standards
CB
Cambridge Bay
CDU
control display unit
CFIT
controlled flight into terrain
CVFR
controlled visual flight rules
COM
company operations manual
CRM
crew resource management
CRMI
CRM instructor
CRMIE
CRM instructor examiner
CVR
cockpit voice recorder
CWS
control wheel steering
CYRB
Resolute Bay Airport (International Civil Aviation Association [ICAO] location identifier)
CYUX
Hall Beach
CYZF
Yellowknife Airport
CZ
control zone
DG
directional gyro (free gyro)
DME
distance measuring equipment
DMI
deferred maintenance item
EATM
expeditionary air traffic management
EGPWS
enhanced ground proximity warning system
ELT
emergency locator transmitter
EPR
engine pressure ratio
ESTAP
name of a GPS navigational waypoint
ETA
estimated time of arrival
EUROCAE
European Organisation for Civil Aviation Equipment
FAA
United States Federal Aviation Administration
FAB6560
First Air flight 6560
FAF
final approach fix
FD
flight director
FDM
fight data monitoring
FDR
flight data recorder
FL
flight level
FMS
flight management system
FO
first officer
FOM
flight operations manual
FOQA
flight operational quality assurance
FOTM
flight operations training manual
fpm
feet per minute
GA
go-around
GNSS
global navigation satellite system
GPS
global positioning system
GPWS
ground proximity warning system
GS
glideslope (switches use G/S)
HDG HOLD
heading hold
HDG OFF
heading off
HDG SEL
heading select
HSI
horizontal situation indicator
ICAO
International Civil Aviation Organization
IFR
instrument flight rules
ILS
instrument landing system
IMC
instrument meteorological conditions
in. Hg
inches of mercury
IRB
3-letter identifier for the Resolute Bay instrument landing system (ILS) transmitter
JRCC
joint rescue coordination centre
KIAS
knots indicated airspeed
KTAS
knots true airspeed
LOC
localizer
LOSA
line operations safety audit
MAG
magnetic
MAN
manual
MCP
mode control panel
°M
degrees magnetic
METAR
routine aviation weather report
MF
mandatory frequency
MODE SEL
mode selection
MTCA
military terminal control area
MUSAT
name of a GPS navigational waypoint
nav-aid
navigational aid
NDA
Northern Domestic Airspace
NDB
non-directional beacon
nm
nautical miles
NOTAM
notice to airmen
NOTAMC
NOTAM cancellation
NOTAMN
new NOTAM
NOTAMR
replacement NOTAM
NTSB
United States National Transportation Safety Board
OFP
operational flight plan
OTNEL
name of a GPS navigational waypoint
PA
public address
PAR
precision approach radar
PACE
A crew communication strategy whereby pilots employ probing, alerting, challenging, and emergency warning messages to the other crew member.
PF
pilot flying
PIC
pilot-in-command
PITCH CMD
pitch command
PM
pilot monitoring
PNF
pilot not flying
RB NDB
Resolute Bay non-directional beacon
RIBUN
name of a GPS navigational waypoint
RMI
radio-magnetic indicator
RNAV
area navigation
sm
statute miles
SMS
safety management system
SOPs
standard operating procedures
SPECI
special weather report
°T
degrees true
TAF
aerodrome forecast
TAWS
terrain awareness and warning system
TC
Transport Canada
TCA
terminal control area
TEM
threat and error management
TOD
top of descent
TSB
Transportation Safety Board
UTC
universal coordinated time
VAPP
approach speed (VREF) corrected for wind
VFR
visual flight rules
VHF
very high frequency
VMC
visual meteorological conditions
VOR
VHF omnidirectional range
VREF
approach reference speed
YRB
Resolute Bay Airport (International Air Transport Association [IATA] location identifier)