Crossing accident
Canadian Pacific Railway
Freight train 205-09
Mile 128.90, Broadview Subdivision
Broadview, Saskatchewan
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
On 9 August 2012, at about 1835 Central Standard Time, Canadian Pacific Railway freight train 205-09 was proceeding westward at 53 mph when it struck a southbound camper van at a passive public crossing equipped with crossbucks, located at Mile 128.90 on the Broadview Subdivision, near Broadview, Saskatchewan. As a result of the collision, the camper van was destroyed, 4 of the 6 vehicle occupants were fatally injured, the driver was seriously injured, and the remaining occupant sustained minor injuries. The locomotive sustained minor damage, and the train crew was not injured.
1.0 Factual information
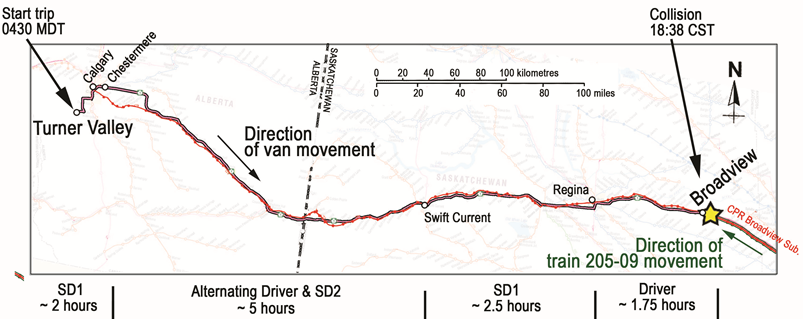
On 09 August 2012 at about 0430,Footnote 1 a 2007 Ford E-350 Econoline camper van conversion built in November 2006 (the van) and equipped with 7 seat belts departed Turner Valley, Alberta, and drove eastward en route to a farm property near Broadview, Saskatchewan. The van was approximately 20 feet long and weighed about 3600 kg. It was regularly maintained, was in good mechanical condition, and was equipped with new tires. The van was driven by a fully licensed supervising driver (SD1). There were 5 other vehicle occupants, which included an additional qualified supervising driver (SD2), a novice driver with a learner’s permit (the driver) and 3 children.
About 2 hours into the trip, they stopped at Chestermere, Alberta, to pick up a suitcase, after which they changed drivers and continued. SD2 and the driver alternated driving from Chestermere to Swift Current, Saskatchewan, while SD1 napped in the back of the van. SD1 then drove from Swift Current to Regina, Saskatchewan, while the driver napped. Departing Regina, the driver resumed driving under SD1’s supervision. Throughout much of the trip, the Canadian Pacific Railway (CP) tracks ran parallel and close to Highway 1 (Figure 1).
The CP Indian Head Subdivision extends eastward from Regina (Mile 93.5) to Broadview (Mile 0.0) and parallel to Highway 1. At Broadview, the track crosses over to the south of Highway 1 and then the CP Broadview Subdivision extends eastward from Broadview (Mile 130.9) to Brandon, Manitoba (Mile 0.0). While driving from Regina to Broadview, train movements were observed predominantly travelling eastward.
CP freight train 205-09 (the train) was travelling westward from Winnipeg, Manitoba, en route to Vancouver, British Columbia. The train was powered by 3 head-end locomotives, and was hauling 63 cars (53 loaded cars and 10 empty cars). The lead locomotive was equipped with a forward-facing video camera. The train was approximately 6020 feet long and weighed about 5478 tons. The train had been subjected to a full mechanical inspection and air brake test prior to departure; no exceptions were noted. The train crew was composed of a locomotive engineer and a conductor. Both crew members were familiar with the subdivision, met fitness and rest requirements and were qualified for their respective positions.
1.1 The accident
At 1834, the train was proceeding westward at 53 mph on the Broadview Subdivision with the ditch lights on and the headlights on full power. The track in this area is situated 50 m to 60 m south of Highway 1. The land between the highway and the tracks is covered predominantly with prairie grass. The track is elevated, lined by intermittent stands of trees and occasional clumps of dense brush on both sides of the track. Approaching the crossing, the train crew’s view of Highway 1 was obstructed by trees along the north embankment of the railway right-of-way (ROW).
The train crew began to apply dynamic brake in preparation for a stop and crew change at Broadview. At the whistle post, about ¼ mile from the crossing (1320 feet), the train crew sounded the train horn for about 1 second. The train horn was sounded again about 1070 feet from the crossing. About 575 feet east of the crossing, the train cleared trees along the ROW and the crew observed a flash of light reflected from the windshield of the van, which was approaching the crossing from the north. The train crew then applied the train horn for a third time. When the locomotive was approximately 200 feet from the crossing, the train crew, realizing that the van was not stopping, applied a long burst of the train horn that continued as the train occupied the crossing. At about 1835, the train struck the midsection of the van.
Following impact, the crew placed the train into emergency, and brought it to a stop with the head-end located at Mile 129.4. The train crew made the required emergency broadcasts, and the conductor walked back to the crossing to provide assistance to the van occupants. The driver had sustained serious injuries and remained trapped in the driver’s seat. SD1 remained in the front passenger seat and sustained minor injuries. The other 4 passengers were fatally injured.
Police, fire, and emergency medical personnel responded, and arrived at the site. The driver was extricated from the van and airlifted to hospital in Regina. SD1 was treated at a local hospital and released. At the time of the occurrence, the weather was sunny, with a temperature of 19°C, and the winds were gusting from the southeast to 19 km/h. The sun was low in the western sky, approximately 15.2° above the horizon. The sunset occurred at 2028 that day.
1.2 Driver actions
The van had been travelling eastward on Highway 1 at the authorized highway speed of approximately 110 km/h (approximately 70 mph) for about 1 ¾ hours. For much of this time, the passengers in the back were watching videos and listening to music. SD2 was seated behind the driver and was engaged in conversations with SD1 and with the driver.
Approaching Airport Road (Provincial Road 201), the van moved right onto the paved turning lane and slowed almost to a stop before turning south (right) onto Airport Road (Figure 2).
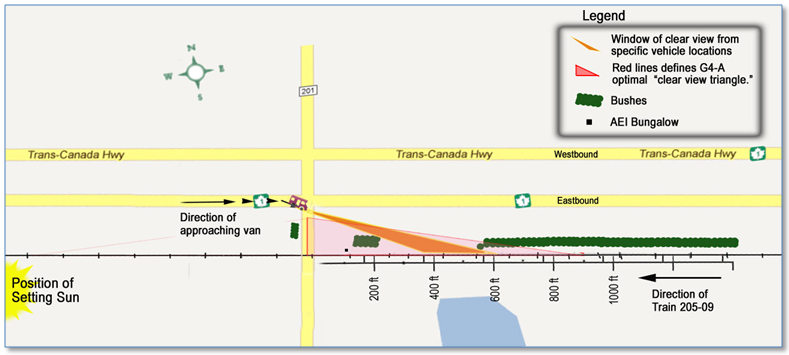
The driver looked left for trains coming from the east (Photo 1) before proceeding towards the crossing (Photo 2). Seeing no train approaching from the east, the driver then looked right for any trains approaching from the west (Photo 3). The view westward was directly into the setting sun; brush along both the road and ROW partially obscured the tracks.



After turning, the driver briefly accelerated up to nearly 28 km/h and then slowed to about 18 km/h near the crossing. Just before reaching the crossing, the driver shoulder-checked again to the left (east) and for the first time saw the approaching train framed between the signal bungalow and the crossing (Photo 4). The driver accelerated at the last moment, but it was too late to avoid the collision. The airbags deployed as a result of the accident.

1.3 Site examination
The lead locomotive sustained minor damage but the train did not derail. The van was shoved a short distance and came to rest in the ditch to the south and west of the crossing. The front driver side of the van’s cab was collapsed while the second and third row passenger seating areas were compressed such that passenger compartment survivability was compromised. There were scrape marks on the crossing timbers and in the ballast. The railway sign post on the west side of the crossing was bent.
The following was determined during the site examination:
- There were 2 groups of trees and other bushes on the north side of the railway ROW to the east of the crossing.
- For vehicles travelling east on Highway 1 and for those turning south onto Airport Road, the trees and bushes obstructed the driver’s view of approaching trains from the east.
- One group of vegetation was located between 160 feet and 210 feet east of the crossing; the other group was a continuous stand of trees starting from about 530 feet from the crossing, which limited sightlines for a turning vehicle to less than 700 feet.
- To the west of the crossing, there were bushes along the road and along the tracks that hampered a driver’s view to the west.
- The ascending grade of the southbound crossing approach obscured a driver’s view of the road beyond the crossing.
1.4 Recorded information and calculation of van speed
Information from the locomotive event recorder (LER) and the locomotive’s forward-facing video camera was collected and reviewed by the TSB Laboratory. A frame-by-frame analysis of the video was conducted to determine the relative location, speed, and position of the van and the train as they each approached the crossing.
The vehicle speed was determined by analysing adjacent image frames from the video to determine the change in the position relative to the change in time over the length of the video. The changes in position could be measured along the plane of the image with a ratio of the number of image pixels for a known distance. In this instance, the known distance was the spacing between the rails. Due to the small off-perpendicular angle of the track to the road, the calculated speed would differ little from the true speed. The results are recorded in Table 1.
| Frame | Vehicle approach speed (km/h) | Distance of vehicle to crossing (feet) | Time (hhmm:ss.ss) | Train speed (mph) | Rail mile post (mile) | Distance of train to crossing (feet) | Time before collision (seconds) |
|---|---|---|---|---|---|---|---|
| 1735 | - | - | 12:19.0 | - | - | - | - |
| 1745 | - | 132.4 | 12:19.7 | 53.2 | 128.791 | 577.5 | 7.33 |
| 1750 | 3.3 | 131.4 | 12:20.0 | 53.2 | 128.796 | 551.5 | 7 |
| 1755 | 24.3 | 124.1 | 12:20.3 | 53.2 | 128.8 | 525.5 | 6.67 |
| 1760 | 25.9 | 116.3 | 12:20.7 | 53.2 | 128.805 | 499.4 | 6.33 |
| 1765 | 25 | 108.7 | 12:21.0 | 53.2 | 128.81 | 473.4 | 6 |
| 1770 | 25.6 | 101 | 12:21.3 | 53.2 | 128.815 | 447.4 | 5.67 |
| 1775 | 23.7 | 93.9 | 12:21.7 | 53.2 | 128.82 | 421.4 | 5.33 |
| 1780 | 21.7 | 87.4 | 12:22.0 | 53.2 | 128.825 | 395.4 | 5 |
| 1785 | 20 | 81.3 | 12:22.3 | 53.2 | 128.83 | 369.4 | 4.67 |
| 1790 | 21.8 | 74.8 | 12:22.7 | 53.2 | 128.835 | 343.4 | 4.33 |
| 1795 | 23.6 | 67.7 | 12:23.0 | 53.2 | 128.84 | 317.4 | 4 |
| 1800 | 24.8 | 59.3 | 12:23.3 | 53.2 | 128.845 | 291.4 | 3.67 |
| 1805 | 26.5 | 52.2 | 12:23.7 | 53.2 | 128.85 | 265.4 | 3.33 |
| 1810 | 27.3 | 44 | 12:24.0 | 53.2 | 128.855 | 239.4 | 3 |
| 1814 | 24.9 | 38 | 12:24.3 | 53.2 | 128.859 | 218.6 | 2.73 |
| 1815 | 24.7 | 36.5 | 12:24.3 | 53.2 | 128.86 | 213.4 | 2.67 |
| 1819 | 21.8 | 31.3 | 12:24.6 | 53.2 | 128.864 | 192.5 | 2.4 |
| 1820 | 20.7 | 30 | 12:24.7 | 53.2 | 128.865 | 187.3 | 2.33 |
| 1821 | 20.3 | 28.8 | 12:24.7 | 53.2 | 128.866 | 182.1 | 2.27 |
| 1824 | 19.1 | 25.4 | 12:24.9 | 53.2 | 128.868 | 166.5 | 2.07 |
| 1825 | 19.5 | 24.2 | 12:25.0 | 53.2 | 128.869 | 161.3 | 2 |
| 1826 | 18.6 | 23.1 | 12:25.1 | 53.2 | 128.87 | 156.1 | 1.93 |
| 1829 | 18.7 | 19.7 | 12:25.3 | 53.2 | 128.873 | 140.5 | 1.73 |
| 1830 | 19.1 | 18.6 | 12:25.3 | 53.2 | 128.874 | 135.3 | 1.67 |
| 1831 | 19.4 | 17.4 | 12:25.4 | 53.2 | 128.875 | 130.1 | 1.6 |
| 1834 | 18.7 | 14 | 12:25.6 | 53.2 | 128.878 | 114.5 | 1.4 |
| 1835 | 18.2 | 12.9 | 12:25.7 | 53.2 | 128.879 | 109.3 | 1.33 |
| 1836 | 18.1 | 11.8 | 12:25.7 | 53.2 | 128.88 | 104.1 | 1.27 |
| 1839 | 19.8 | 8.2 | 12:25.9 | 53.2 | 128.883 | 88.5 | 1.07 |
| 1840 | 20.3 | 7 | 12:26.0 | 53.2 | 128.884 | 83.3 | 1 |
| 1841 | 20.3 | 5.8 | 12:26.1 | 53.2 | 128.885 | 78.1 | 0.93 |
| 1844 | 21.3 | 2 | 12:26.3 | 53.2 | 128.888 | 62.5 | 0.73 |
| 1845 | 21.8 | 0.7 | 12:26.3 | 53.2 | 128.889 | 57.3 | 0.67 |
| 1855 | Collision | 0 | 12:27.0 | 53.2 | 128.899 | 0 | 0 |
1.5 Vehicle data recorders
The 2007 Ford E-350 van is not equipped with a computer module specifically designed to provide event data recorder (EDR) capability. However, the vehicle was equipped with the following electronic modules that can provide certain crash and vehicle operating parameters in the event of an air bag deployment:
- The restraint control module (RCM) deploys seat belt buckle pre-tensioners and frontal air bags during a frontal crash. The RCM is capable of recording the longitudinal acceleration forces experienced during a frontal crash, and also sends a deployment signal to the powertrain control module (PCM) over the vehicle’s control network. The PCM controls the operation of the vehicle’s engine and transmission based on inputs from various sensors. When the PCM receives a deployment signal from the RCM, the PCM locks the last 20 seconds of certain vehicle operating parameters into non-volatile memory.
- The vehicle data captured includes restraint deployment, vehicle speed, accelerator pedal position, engine throttle, brake application, automatic braking system function, and whether or not the transmission was in neutral.
- The PCM requires power for at least a few tenths of a second after a collision to preserve the data.
The PCM from the van was recovered and reviewed by the TSB Laboratory, which determined the following:
- Although the seat belt pre-tensioners applied and the airbags deployed, the PCM did not receive a restraint deployment signal; consequently, the accident data was overwritten.
- The communication line in the vehicle’s control network may have been severed during the initial impact with the train, which occurred prior to the air bag deployment signal and likely prevented RCM data from being communicated to the PCM.
1.6 Subdivision and track information
The Broadview Subdivision consists of a single main track. The method of train control is the centralized traffic control (CTC) authorized by the Canadian Rail Operating Rules (CROR) and supervised by a CP rail traffic controller (RTC) located in Calgary, Alberta. The maximum authorized speed in the vicinity of the accident is 60 mph. At this location, there is an average of 23 freight trains per day.
The track at the crossing was tangent and consisted of 115-pound continuously welded rail. The track was in good condition and met Track Safety Rules requirements, approved by Transport Canada (TC). In the vicinity of the accident, CP’s last track inspection by hi-rail was conducted on 07 August 2012; no exceptions were noted.
1.7 Crossing and road information
For lower volume roads, public crossings are normally equipped with reflectorized standard railway crossing signs (SRCS), otherwise known as crossbucks, that are secured to wooden posts. SRCS indicate that drivers must yield the right-of-way to trains. This is also a requirement specified in the provincial highway traffic acts and the Railway Safety Act (RSA). SRCS may also be accompanied by a stop sign on the post or on the roadway approach. Crossings with this type of protection are referred to as public passive crossings.
Public crossings with high road-traffic volumes on multi-track, high-speed or high-density rail lines are normally equipped with automated warning devices (AWD). These devices typically include flashing lights and bells, and often include automatic gates.
The risks associated with railway crossings vary according to the type of crossing protection (e.g., AWD, SRCS, or SRCS and stop signs) and the specific hazards associated with the crossing location. When comparing crossing accident statistics, only crossings with similar protection and hazards should be used.
The railway is responsible for the maintenance of public passive crossings up to a point 18 inches (46 cm) beyond the outside rails and for maintaining sightlines along the railway ROW. The road authority is responsible for maintaining the roadway structure beyond the railway limits, sightline obstructions on municipal land, and for installing roadway signage where required. The roadway geometrics in the vicinity of the crossing must also comply with TC’s Grade Crossing Regulations.
Airport Road is a 24 foot–wide, 2-lane gravel road with a north–south orientation that crosses the Broadview Subdivision at a 90° angle. From Highway 1, the road ascends at a 5.1% grade as it nears the uncontrolled crossing located about 185 feet south of Highway 1. The posted road speed is 80 km/h in the vicinity of the crossing. SRCS mounted on wooden posts on each side of the track indicate the presence of the railway crossing. There is an advance warning sign on the south approach, but no signs on the north approach between Highway 1 and the tracks. Weekday traffic on Airport Road at this location averaged about 60 vehicles per day.Footnote 2
TSB records identify a previous accident at the Airport Road crossing in 2002. The accident occurred in the winter when a vehicle slid into the path of an oncoming train. Three vehicle occupant injuries were reported (TSB Occurrence R02W0191).
1.8 Regulatory overview
The Railway Safety Act (RSA)Footnote 3 establishes the framework for regulation and enforcement of railway safety, including railway crossing safety. In particular:
- Subsection 24(1)(e) of the RSA delegates TC with the power to make regulations respecting the removal of anything, including trees, brush or structures, that obscures clear vision of a road or railway and constitutes a threat to safe railway operations.
- Section 26.2 of the RSA provides that the users of a road shall yield to an approaching train, and outlines the equipment operator's responsibility to ensure that road users are provided adequate warning in order to take appropriate defensive measures.
- Section 31 of the RSA delegates a Railway Safety Inspector (RSI) with the power to close a crossing or restrict its use. Specifically, an RSI may issue an “order” to the responsible parties to repair or improve a crossing if the RSI is satisfied that there is an immediate threat to safe rail operations. However, RSI authority is restricted by paragraph 31(4), which states that “a railway safety inspector shall not determine that the standard of construction or maintenance poses a threat to safe railway operations if that standard conforms to all applicable regulations, rules and emergency directives”. Once an RSI has issued an “order”, the restrictions remain in effect until such time as the inspector deems that the threat has been removed.
There are regulations that address locomotive/rolling stock conspicuity and grade crossing design. However, the current regulations governing passive crossings, Railway-Highway Crossing at Grade Regulations (CTC 1980-8 RAIL, SOR/80-748, 18 September 1980), have no sightline requirement and do not apply to crossings designed prior to January 1981, such as the Airport Road crossing.
TC is currently consulting on proposed Grade Crossing Regulations pursuant to the Railway Safety Act. These regulations have been in the draft stage for nearly 25 years, during which there has been ongoing dialogue with the industry as well as provincial and municipal authorities. The proposed regulations outline the responsibilities of the respective partners at crossings with respect to maintaining the safety defences to appropriate standards. The proposed regulations also incorporate by reference the draft Canadian Railway/Roadway Grade Crossing Standards - RTD 10 manual (RTD 10),Footnote 4 which sets out best engineering practices and operating procedures for safety at crossings. RTD 10 has been widely used as a guideline in the industry for a number of years. TC had intended to proceed with the regulatory proposal and publish it in the Canada Gazette, Part I by the spring of 2002, but that did not occur.
A number of crossing accident investigations by the TSB have referenced the new grade crossing regulations. In TSB investigation report R99T0298, the Board recognized that TC had done much work in the previous 10 to 13 years to develop new crossing regulations. However, the Board was concerned about the delay in replacing the existing regulations, which are minimal and essentially obsolete. The Board determined that the delay in publishing new regulations was not advancing crossing safety, and subsequently recommended that
[t]he Department of Transport expedite the promulgation of new grade crossing regulations.
Transportation Safety Recommendation 01-05, issued 2001
In TSB investigation report R99T0147, the Board expressed that continued delays in the regulatory process towards addressing this issue continued to place motorists at risk. While there was already a recommendation (R01-05) on expediting the issuance of the Grade Crossing Regulations, the delays continued. Consequently, the Board recommended that
[t]he Department of Transport implement new grade crossing procedures without delay irrespective of the status of the proposed regulations.
Transportation Safety Recommendation R03-03, issued 2003
The new crossing regulations have been in development for nearly 25 years, but they are still in draft form. In the interim, TC Guideline G4-A, Minimum Railway/Road Crossing Sightline Requirements For All Grade Crossings Without Automatic Warning Devices (Appendix A) was established to help with passive crossing sightline issues. Although it is only a guideline, G4-A is widely used by railways and road authorities in Canada as a reference for maintaining adequate crossing sightlines. Guideline G4-A indicates that a triangular clear view areaFootnote 5 should be maintained in each quadrant of the crossing. The sightline required is defined by the following elements:
- Distance of the vehicle from the track centre
- Maximum authorized roadway speed for vehicles (km/h)
- Maximum authorized train speed for the area (mph)
Note 1 of G4-A instructs users to “use maximum allowable train and vehicle speeds for the purpose of establishing the clear view area“.Footnote 6
The draft Canadian Railway/Roadway Grade Crossing Standards - RTD 10 defines maximum vehicle (road) operating speed as the actual vehicle speed at the safe stopping sight distance, which is:
- the legal maximum speed limit (posted or unposted);
- the posted advisory speed; or
- the reported operating speed where constraints such as traffic control devices at intersections on the road approaches or physical restrictions such as curves restrict speed, or as determined by a traffic engineering study.
There are no TC regulations specifically governing the frequency of sightline inspections.
1.9 Transport Canada inspections
The last TC track inspection on the Broadview Subdivision was conducted on 29 May and 30 May 2012. The inspection report identified 17 defects, including insufficient sightlines for the crossing at Mile 121.63. No sightline deficiencies were noted for the Airport Road crossing at Mile 128.90.
TC conducted a detailed inspection for the Airport Road crossing on 02 August 2011, and again on 21 August 2012 after sightline remediation had taken place following the accident. Table 2 lists the recorded sightlines for the 2 crossing inspections.
| Date of inspection | Eastward sightline (feet) | Westward sightline (feet) | ||
|---|---|---|---|---|
| Southbound crossing approach after turning off Highway 1 |
Northbound crossing approach towards Highway 1 |
Southbound crossing approach after turning off Highway 1 |
Northbound crossing approach towards Highway 1 |
|
| 02 August 2011 | 500 | 1500 | 400 | 400 |
| 21 August 2012 | 687 | 1500 | 897 | 1300 |
For the 02 August 2011 crossing inspection, TC designated a maximum road operating speed of 30 km/h due to the crossing's proximity to Highway 1. With designated road speed of 30 km/h and maximum train speed of 60 mph, Guideline G4-A prescribes a clear sightline of 273 m (900 feet) from the crossing along the track from within either 30 m (desirable) or 20 m (minimum) along the roadway on each side of the crossing. The TC inspection results did not meet Guideline G4-A requirements. There is no indication that these inspection results were communicated to CP.
1.10 Canadian Pacific Railway crossing and sightline inspections
CP Standard Practice Circular (SPC) 29 – Road Crossings, dated 24 March 2010, applies G4-A “desirable” values as its engineering standard. Using the desirable value, SPC 29 requires a clear sightline of 273 m (900 feet) from the crossing along the track from within 30 m along the roadway on each side of the crossing. There are no requirements for CP to conduct regular formal crossing inspections unless there is a collision between a vehicle and a train at a crossing. When this occurs, SP 29(2)f requires a full crossing inspection to determine whether the crossing meets regulatory requirements. A full crossing inspection generally includes, but is not limited to:
- Inspection of roadway approach gradients;
- Inspection of crossing surface, including planks, concrete or asphalt;
- Inspection of track condition within the crossing;
- Measurement of available sightlines; and
- Review of vehicle activity.
CP's Crossing Sightline Improvement Program (CSIP) is a regional brush removal and suppression program that plans activities based on regional growing characteristics. Areas with high precipitation and long growing seasons (e.g., British Columbia's south coast or southwestern Ontario) have target treatment rotations of 2 to 3 years, while drier areas with shorter growing seasons (e.g., the Prairies) have target treatment rotations of 4 to 5 years. Scheduled activities are also supported based on communication with local and regional authorities.
Local CP managers and supervisors regularly patrol their territories as per company standards and TC guidelines. Track defects and other potential safety issues are noted. In instances where immediate corrective action is required, maintenance personnel and equipment are mobilized. Larger-scale activities related to crossing sightlines require the resources of the Manager, Vegetation Program. The regional vegetation treatment rotation is adjusted and prioritized as needed.
Local activities are also supported through public works management, which interacts with municipalities and road authorities to coordinate crossing upgrade projects, and real estate operations that update crossing maintenance agreements and nominate crossings for closure. Any urgent sightline conditions observed during audit activities are communicated to the local management for corrective action.
In addition, TC conducts periodic crossing inspections and communicates any observed deficiencies to CP in the TC inspection report. Occasionally, feedback on sightlines is also received from other parties.
1.11 Vegetation mitigation for crossing sightlines
The Broadview and Indian Head subdivisions were scheduled for the CSIP in 2012. On the Broadview Subdivision, 128 crossings were cut and/or sprayed. Activities on the Broadview Subdivision included 8 days in early June 2012, covering spot locations from Mile 3.7 to Mile 127.18. Between 25 July 2012 and 9 August 2012, various crossings between Mile 81 and Mile 127.5 were addressed. Track time and service truck availability influenced which crossings were addressed and in what order. Local CP management also identified a short list of about 24 crossings as very high priority as a result of company and/or TC observations during a recent inspection; Airport Road was not on the short list. Consequently, vegetation at some crossings was addressed first with the balance to be cut or sprayed later. Overall, the number of crossings addressed under the CSIP in Saskatchewan and Manitoba was 357 in 2011 and 311 in 2012.
1.12 Graduated driver licensing
Graduated driver licensing (GDL) is a multi-tiered approach to help novice drivers (independent of their age) gain driving experience while managing the risks they pose to themselves and others prior to being issued a full driver's licence. GDL “also addresses age-related or lifestyle factors that give rise to the greater crash risk of young motorists, by minimizing the opportunities for them to engage in risky behaviours or encounter risky situations”.Footnote 7
The core components of GDL programs are extended learning times (that take novice drivers through learner and intermediary stages before advancing to a full license) and restrictions that control when and where they drive together with the number and type of passengers permitted. Each Canadian province and territory has developed its own GDL program. In Alberta, the GDL program is structured as follows:Footnote 8
- The Stage 1 GDL entry age is 14 years old, which is 2 years younger than the entry age of 16 in most other provinces and territories. This stage is considered as a learner's licence. The learner's licence restrictions remain in effect until the driver is 16 years old and passes a road test to obtain a driver's licence, after which Stage 2 GDL criteria apply. The younger entry age of the Alberta GDL program reflects the reality of rural children having access to farm vehicles and opportunities to learn vehicle control while on rural property.
- Supervising drivers must be 18 years of age and fully licensed. This is in contrast to most other provinces and territories, which have no minimum age specified for supervising drivers but rather have a minimum “fully licensed” time requirement for supervising drivers that ranges from 1 to 4 years.
- The number of passengers carried by a novice driver cannot exceed the number of seat belts in the vehicle. This is in contrast to 6 provinces and territories that restrict the number of passengers other than the supervising driver. Newfoundland and Labrador, New Brunswick, and Nova Scotia do not allow novice drivers to carry any additional passengers other than the supervising driver. British Columbia and Yukon allow 1 passenger in addition to a supervising driver, while Prince Edward Island allows only the supervising driver and family members.
Provincial and territorial guidance to supervising drivers is provided in coaches' handbooks. The focus is on helping the supervising driver develop a coaching plan whereby the novice driver is gradually introduced to increasingly complex driving situations. Coaching guides typically follow the drivers' education curriculum. The Alberta coaches' workbook addresses the evaluation of driver behaviour with respect to uncontrolled railway crossings as one of the items in a checklist. Although the Alberta GDL program recommends that all drivers ensure that they are well rested before starting their trip, it does not provide guidance or offer rest strategies to restore optimal human performance.
The Alberta GDL program, like provincial and territorial GDL programs, provides only basic guidance on approaching uncontrolled railway crossings, focusing instead on reinforcing the right-of-way of trains. The guidance does not indicate that most people will underestimate train speed and that train horns may be inaudible inside a moving car with the windows up. For this occurrence, trip planning activities with respect to breaks and alternating drivers followed the general guidance offered by Alberta's GDL program.
1.13 Driver age and experience
During the trip, the driver operated the vehicle according to the Stage 1 terms of the Alberta GDL program with an appropriately licensed individual (SD1) in the front passenger seat. The holder of an Alberta GDL Stage 1 driver's licence is allowed to carry passengers and to drive in other provinces, including Saskatchewan, under the same terms.
The driver was 1 week away from a 16th birthday and was scheduled to take the on-road portion of the driver's licence examination shortly after the birthday. The driver had been operating farm vehicles and trucks with trailers for at least 2 years and was experienced with the motor skills of vehicle operation. However, the driver's prior experience with public passive crossings was limited to infrequent use of the occurrence crossing when visiting relatives in the Broadview area. There were no passive railway crossings in the driver's home town.
Young novice drivers are slower at detecting hazards and tend to identify fewer hazards than experienced drivers, particularly hazards that are located further away.Footnote 9 Experienced drivers tend to extend the spread of horizontal and vertical visual scanning in hazardous driving situations, while less experienced drivers do not normally demonstrate the same flexibility in scanning behaviour.
1.14 Hours of wakefulness
The trip was planned with stops in Chestermere, Swift Current, and Regina. The vehicle occupants left home at 0430, with SD1 driving to Chestermere. Approximately 2 hours later, when they changed drivers at Chestermere, SD1 had been continuously awake for 22.75 hours. SD1 slept in the van during the 5-hour leg between Chestermere and Swift Current, then drove from Swift Current to Regina, where the driver resumed driving under the supervision of SD1.
On the morning of the occurrence, the driver woke up approximately 2.25 hours earlier than the habitual “working” rise time of 0730 am, and had had only 5.25 hours of nighttime sleep prior to the trip—3.25 hours less than the recommended average sleep duration for teenagers,Footnote 10 and 2.25 hours less than the driver's usual sleep duration. However, the driver had opportunities to nap while in the van on the first leg of the trip between home and Chestermere, and again travelling between Swift Current and Regina, which included a slightly extended stop in Regina.
The quality of daytime sleep is not biologically equivalent to that of nighttime sleep.Footnote 11 Daytime sleep is generally less restorative than nighttime sleep because humans are physiologically programmed to sleep during hours of darkness.Footnote 12
1.15 Effects of fatigue
Virtually every function in the body (e.g., body temperature, digestion, hormone levels) follows daily cycles known as circadian rhythms. Disruptions in circadian rhythms can have a detrimental effect on performance and cognitive functioning,Footnote 13 especially during periods when other circadian rhythms dictate sleep. Specific performance measurements, such as reaction time,Footnote 14 can be particularly affected.
Driver performance decrements associated with periods of prolonged wakefulness and disruptions to the circadian rhythm have been cited in both research literature and a number of TSB reports.Footnote 15 In these cases, fatigue related to either or both conditions is known to be detrimental to both driver performance and cognitive functioning.
1.16 Driver behaviour at passive level crossings
Approaching a passive level crossing, a driver must pass through 4 distinct, successive approach zones. Each zone requires a driver to acquire and process different information Footnote 16 and/or take action in order to negotiate the crossing successfully (Figure 3).
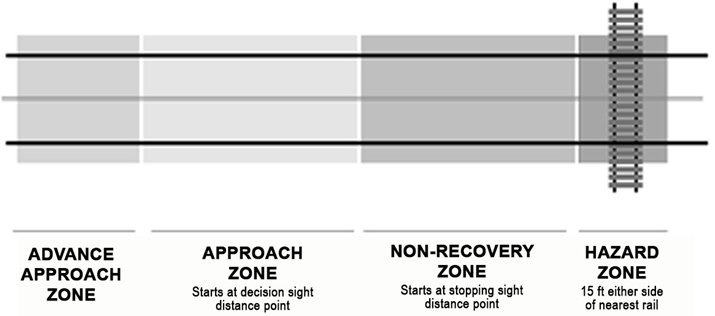
- In the advance approach zone, drivers acquire and process information regarding the presence of a crossing and understand that they are responsible for their own safety and for detecting oncoming trains. The information is critical because it builds driver expectancy, which can facilitate or hinder the appropriate driver response at the crossing, depending on whether a train is present. In this occurrence, the advance approach zone started on Highway 1 and ended just after the van turned onto Airport Road.
- In the approach zone, drivers detect and recognize the train (if present), decide on a course of action (e.g., start to slow down, maintain speed, or accelerate) and begin to implement the action. Information regarding sight limitations, train speed, distance to the train, and direction of the train's approach is used by the driver in this zone. In this occurrence, the approach zone began approximately 5 m after the turn onto Airport Road (approximately 180 feet or 54.8 m from the crossing) and continued until the last point at which sufficient braking could be applied to allow the van to stop safely.
- In the non-recovery zone, drivers process information regarding the train's speed and distance, as well as the road vehicle's speed, projected stop point, and the distance to the tracks. It is within this zone that a driver must stop the vehicle to avoid a collision with an approaching train. The non-recovery zone corresponds to the braking distance, and starts at the stopping sight distance point (approximately 41 feet or 12.5 m from crossing). In this occurrence, based on an average TC-estimated traffic speed of 30 km/h, a poor roadway coefficient of friction (0.4) due to the gravel surface and a 5.1% uphill grade, the non-recovery zone (braking distance) is estimated to be about 26 feet (7.9 m).
- Drivers must be clear of the hazard zone to avoid colliding with a train that is either approaching or at the crossing. The hazard zone is located within 15 feet (4.6 m) of the nearest rail. Neither acceleration nor braking is an effective defence once a vehicle is positioned within the hazard zone.
To ensure that drivers are able to detect and recognize a train at a level crossing, sightlines within the approach zone must be adequate along the approach road before entering the non-recovery zone so that a driver can apply sufficient braking force if a train is approaching the crossing. When travelling in the approach zone, visual obstructions will increase the time it takes for drivers to detect, recognize, and initiate a braking response to an approaching train. This time is referred to as the driver's perception reaction time (PRT). As a driver's PRT is prolonged, the onset of braking is delayed. The further braking distance is displaced from the non-recovery zone to the hazard zone, the greater the likelihood of a collision.
The typical PRT used in traffic planning and road design is 2.5 seconds, and is based on the assumption that active collision indicators, such as brake lights from a vehicle ahead or railway crossing AWD lights, are in front of the driver.Footnote 17 However, these assumptions do not apply when drivers approach a passive railway crossing protected by SRCS alone and the train is not already in the field of view in front of the driver. In such cases, the vehicle driver must scan in both directions for approaching trains. The total refocusing interval to go from the front to one side (0.74 s) and then to the other side and back to the front (1.08 s) is approximately 1.82 s.Footnote 18 Consequently, a more realistic design PRT for approaches to passive crossings would be approximately 4.5 s (2.5 s + 0.74 s + 1.08 s = 4.32 s).
TC's G4-A minimum sightline guidelines for passive grade crossings (Appendix A) are based on the commonly used driver PRT of 2.5 s.
1.17 Factors affecting train detection
Vehicle drivers must have clear sightlines to the train over a sufficient time interval on the approach to a crossing in order to accurately determine whether a train is present and moving. Factors influencing train detection include:
- Driver expectation bias – Since drivers rarely encounter a train at a crossing in rural areas, they can develop an expectation that they will not encounter a train. For a driver to overcome this expectation bias, a train would have to be readily visible, recognized, and determined to be approaching.
- Visual conspicuity – The train needs to be distinguishable from the surrounding environment.
- Unchanged retinal image - When a driver looking ahead at the road is on a collision course with an object approaching from the side, such as an approaching train at a level crossing, there may not be significant retinal image motion. This lack of motion makes it unlikely that a driver will perceive the presence of the train, unless the driver directly gazes towards it.
- Train horn audibility - Train horns are often described as a secondary alerting system because their effectiveness is affected by horn location, the speed of the train, and the dampening of sound through the road-vehicle shell.Footnote 19
1.18 Train horn information
Rule 14 of the CROR governs the use of locomotive horn signals. Paragraph 14(l) indicates that the train horn must be sounded at every whistle post, using a succession of 2 long sounds, 1 short sound and 1 long sound. Trains exceeding 44 mph must sound the whistle signal ¼ mile (384 m) before the crossing; the signal must be prolonged or repeated until the crossing is fully occupied.
Section 11.2 of TC's Railway Locomotive Inspection and Safety Rules (4 February 2010) provides as follows:
All locomotives other than in designated service operating in a controlling position shall be equipped with […]:
- a horn capable of producing a minimum sound level of 96 db (A)Footnote 20 at any location on an arc of a 30 meters (100 feet) radius subtended forward of the locomotive by angles 45 degrees to the left and to the right of the centerline of the track in the direction of travel;
A Transportation Development Centre (TDC) studyFootnote 21 on locomotive horn effectiveness determined the following:
- Audible warnings should be at least 10 dB(A) above ambient noise to be recognizable as an auditory danger signal.
- For a horn mounted near the longitudinal mid-point, the overall sound pressure level of the horn, as measured in front of the moving train, is reduced by as much as 18 dB(A) 13 to 14 degrees off the centre line of the locomotive compared with a stationary measurement.
- For a horn mounted near the mid-point, the spectral quality is diminished such that the sound is ill-defined against background noise. Consequently, a train horn with an output of 114 dB(A) measured at 100 feet would only generate 96 dB(A) towards the front of the train when travelling at 60 mph. Studies cited in the TC report recommend using 30 dB(A) as the typical sound loss offered by a vehicle shell.
A number of TSB investigationsFootnote 22 have concluded that horn effectiveness can be compromised due to a combination of horn placement on the locomotive and ambient noise levels inside the road vehicle. The occurrence train, travelling at 53 mph, was configured with a 3-flute, mid-mounted horn. Based on the TDC data, this type of horn would generate 96 dB(A) 100 feet from the crossing. The van windows were closed, resulting in an additional loss of 30 dB(A). The potential background noise within the van comprised a DVD player for the children in the back, adult conversation, and vehicle noise associated with speeds between 18 and 28 km/h on a gravel road. It is estimated that the sound within the vehicle was at least 67 dB(A). With the train located 100 feet from the van, the signal-to-noise ratio (SNR) of the train horn would be calculated so:
- Train horn dB(A) − Vehicle shell loss dB(A) − Background noise in van = Train horn SNR
and the SNR would have been:
- 96dB(A) − 30dB(A) − 67dB(A) = −1 dB(A)
In addition, for each halving of distance between the train horn and the car, the SNR increases by 6 dB(A):
- At 50 feet, the SNR would have been 5 dB(A)
- At 25 feet, the SNR would have been 11 dB(A)
- At 12.5 feet, the SNR would have been 17 dB(A)
1.19 Factors influencing driver decision-making
Drivers acting within the passive level crossing system must accomplish 4 main sub-tasks: receive information via the senses, process the information, make a decision and carry out a course of action. The following cognitive human factors have been linked to a driver's ability to successfully negotiate a passive crossing equipped with SRCS:
- Faulty activation of schema/mental model — Expectations and knowledge about a given situation are often referred to as schemas or mental models. Individuals develop these internal “mental short cuts” over time as they gain experience.
With regard to passive crossings, drivers generally expect the absence of trains rather than their presence because of the infrequency of previous train encounters. When drivers receive information they expect to receive about their environment, their reaction tends to be quick and error free. However, when the information received is contrary to their expectations, driver performance tends to be slow or inappropriate. - Distraction — Distraction is defined as “the diversion of attention away from activities critical for safe driving towards a competing activity”.Footnote 23 Distraction can be caused by visual, auditory, cognitive or physical sources.
- Driver impairment — This includes factors such as fatigue, alcohol, medical conditions such as diabetes or epilepsy, as well as prescription and non-prescription drugs.
- Hazard perception — Hazard perception is the ability to perceive and identify specific hazards in the driving environment. This involves scanning the road environment, evaluating the presence of other vehicles or objects and predicting other road users' behaviour.
On average, young novice drivers are much slower than experienced drivers at detecting hazards, and they identify fewer hazards.Footnote 24 This is especially true for hazards that are located further away, the detection of which implies more limited visual search strategies. An important and consistent finding from studies of visual scanning in drivers is that experienced drivers use more flexible visual search strategies than inexperienced drivers. For example, the spread of horizontal and vertical visual search among experienced drivers increases in the presence of hazards and hazardous driving situations, whereas inexperienced drivers do not show such flexibility in scanning behaviour.Footnote 25
1.20 Research into passive crossing safety
In 1996, more than half the accidents and 60% of crossing fatalities in the United States (US) occurred at passive crossings. In 1998, the US National Transportation Safety Board (NTSB) published a study entitled Safety Study: Safety at Passive Grade Crossings.Footnote 26 The study was conducted to identify common causes for accidents at passive crossings and to identify means to improve safety at crossings. The safety issues identified include:
- the adequacy of warning systems to alert drivers to the location of a passive crossing;
- road and track conditions that can inhibit train detection;
- behavioural factors that can compromise a driver's ability to detect and react;
- the adequacy of driver education on the dangers present at passive crossings;
- the uniformity of the approach to passive crossing safety; and
- the sufficiency of passive crossing signage.
Chapter 6 of the study, entitled Measures To Improve Safety at Passive Grade Crossings, covers subjects such as grade separation, crossing closure and the installation of train-activated warning devices. Although grade separation or crossing closure may be the optimal improvement for passive crossing safety, the study notes that if separation or closure is not possible, the next most desirable method to improve safety at passive crossings is to equip passive crossings with active devices that warn motorists of oncoming trains.
The NTSB report also concluded that while the installation and enforcement of stop signs at passive crossings could provide consistent information, instruction and regulation to the motoring public, stop signs were to be only considered as an interim measure. The long-term solution to reduce or eliminate collisions between vehicles and trains at public passive crossings would be through the use of in-vehicle safety and advisory warning systems and other applications of intelligent transportation systems (ITS) that provide active warnings to alert a motorist to the presence of a train.
The NTSB also believed that interim ITS solutions were possible, such as signs or signals that can alert a motorist to the presence of a train without depending on expensive track circuitry. Less complex ITS applications were proposed for use at grade crossings; the applications included variable message signs and roadside beacons activated by wireless communications signals emitted by train detection equipment. While the installation of stop signs may be effective in some cases, the real opportunity to advance public passive crossing safety is through low-cost active warning devices.
In 2010, the US Federal Railroad Administration (FRA) published a technology assessment of low-cost active warning devices (i.e., devices that warn drivers about the presence of an oncoming train) for application at passive highway-rail grade crossings.Footnote 27 The research identified a number of systems that could significantly reduce the cost of active warning systems. For instance, the Minnesota Department of Transportation conducted a field operational test of train-activated advance warning signs. Results showed that the low-cost active warning sign system can accurately warn drivers of approaching trains and provide adequate warning times. A driving simulator study of low-cost active advance warning signs revealed that they were effective at decreasing driver approach speeds and collisions at passive level crossings.Footnote 28
Other promising train detection technologies that can be used to control low-cost active warning sign alternatives are based on global positioning systems (GPS), magnetic flux (e.g., wheel sensors) and radar. As these technologies are not track circuit-based, they can be installed, maintained or replaced without great cost or impact on railway operations. However, the use of active warning signs, although showing potential, is not widespread.
In Canada, the following technologies have been tested to increase crossing safety:
- In February 2010, Transport Canada developed Engineering Standards for “Walk Light” Grade Crossing Warning SystemsFootnote 29 for use at private crossings in signalled territory. Walk lights are located at each road approach to the crossing in conjunction with SRCS and a stop sign; they are an alternative active grade crossing warning system that is “fail-safe” in the off position. The walk light displays the image of a walking person when no train is approaching; the image extinguishes when a train is approaching (Photo 5).

- In 2012, a radar system was installed on a portion of Highway 138 south of Ottawa, Ontario to provide advance warning of animal activity on the highway in an area that had a high rate of collisions with wildlife. Since that time, it has demonstrated it can reliably identify moving or stationary threats to vehicle operators in all weather conditions, activate advance warning lights when a threat is detected, and upload collected data to a remote location.Footnote 30 The system is designed to alert drivers to the presence of a large animal in proximity to the roadway, but could also alert a driver to an approaching train at a passive level crossing. Since installation, there have been no vehicle/large animal collisions on this stretch of highway, where a yearly average of 3 serious collisions used to occur. The reduction in accident rate has been attributed at least in part to the measured drop in vehicle speed when the driver alert system is activated.
- In recent years, the automobile industry has implemented all manner of collision avoidance technology, including blind spot detection, vehicle spacing, speed control and automated emergency braking. However, none of these commercial applications have included systems for train detection and avoidance.
1.21 Related occurrence data
In 2012, there were approximately 16 229 road-rail level crossings in Canada, 10 628 (65.5%) of which were passive, in that they were not equipped with controls that indicate the presence (or absence) of an approaching train.
A review of TSB data between 2003 and 2012 revealed the following:
- A total of 2165 crossing accidents in Canada resulted in 267 fatalities and 346 serious injuries.
- 2031 of the 2165 crossing accidents (94%) involved vehicles.
- 658 of the 2031 accidents involving vehicles (32%) occurred at public passive crossings.
- For the 658 accidents at public passive crossings, there were 59 fatalities and 107 serious injuries.
- 1018 of the 2031 accidents involving vehicles (50%) occurred at public automated crossings.
- For the 1018 accidents involving vehicles at public automated crossings, there were 110 fatalities and 172 serious injuries.
In 2012, there were 40 rural passive level crossings situated on the Broadview Subdivision, and 66 more on the Indian Head Subdivision between Regina and the eastern provincial border. Since 2002, there have been 18 occurrences at public passive level crossings on this section of track.
1.22 TSB Laboratory reports
The following TSB Laboratory report was completed:
- LP200/2012 – Analysis of CP Locomotive Video Recording
2.0 Analysis
Neither the handling of the train nor the condition of the track or equipment was considered to have contributed to the accident. The analysis will focus on driver actions and defences in place, the condition and maintenance of sightlines, train horn audibility, driver behaviour and perceptions, fatigue, current sightline requirements and regulatory overview.
2.1 The accident
The train approached the crossing from the east following normal operating procedures. The headlights, the ditch lights and the horn were all activated as required. The van approached Airport Road facing the direction from which the train was approaching, a direction in which the van had been travelling for almost 2 hours. The train and the van approached the crossing on roughly parallel albeit opposing paths. The train was behind a wall of trees that obstructed its view from the highway. As the van slowed and turned onto Airport Road, the train was still more than 1000 feet away from the crossing, behind the wall of trees that continued to about 575 feet from the crossing. Consequently, the train was not visible to the van occupants as the van slowed, turned onto Airport Road and proceeded on the ascending grade towards the crossing.
The driver approached the crossing at approximately 28km/h on Airport Road, and then began to slow the van about 40 feet from the crossing. This corresponds to the non-recovery zone, where the van must be able to come to a stop once the brakes are applied. With the vegetation to the east limiting the view of the van from the train crew and the train from the driver, neither recognized that they were on a collision course until it was too late. Consequently, the driver continued to slow the van and entered the hazard zone at about 18km/h.
Approximately 12 feet from the crossing, the van accelerated. It was likely at this point that the driver recognized the approach of the westbound train. Because the van was already in the hazard zone, the driver attempted to accelerate over the crossing in advance of the train. Since neither acceleration nor braking is effective within the hazard zone, at this point a collision was inevitable. The collision occurred when the van, whose occupants were initially unaware of the approaching train from the east, proceeded into the path of the train and was struck broadside.
2.2 Sightlines
Two groups of trees and other bushes were situated on the north side of the railway right-of-way (ROW), east of the crossing. For eastbound vehicles on Highway 1 and for vehicles turning south onto Airport Road, the vegetation obscured drivers' view of approaching westbound trains. The sightlines to the east were limited to less than 700 feet. For the westbound train, the train crew first observed a flash of light reflected from the windshield of the van approaching the crossing from the north, about 575 feet east of the crossing, as the train cleared trees along the ROW.
Using an estimated road speed of 30 km/h and a maximum train speed of 60 mph, Transport Canada's (TC) Guideline G4-A prescribes a clear sightline of 273 m (900 feet) from the crossing along the track from within either 30 m (desirable) or 20 m (minimum) along the roadway on each side of the crossing. Following the accident, the measured sightlines identified that vegetation maintenance east of the crossing was insufficient and the available sightline in that direction did not meet Guideline G4-A requirements. Although the crossing had been recently inspected and was scheduled for brush cutting, vegetation maintenance had not yet occurred. Consequently, vegetation along the ROW obstructed the sightlines for both the train crew looking westward and the driver looking eastward from Highway 1 as the van turned onto Airport Road and travelled along the roadway approach to the crossing.
The driver had looked left (eastward) for trains approaching from the east. With no trains observed, the driver proceeded towards the crossing. With no trains observed approaching from the east, and since train movements throughout the journey were predominantly observed approaching from the west (eastbound), the driver and SD1 looked westward and likely became focussed on detecting eastbound trains.
To look for eastbound trains, the driver had to look through the van's cab and passenger side window, past SD1, the mirror and van front support pillar into the setting sun where vegetation along the track and the road also partially obstructed the view. The acceleration and deceleration of the van in the approach zone were consistent with a driver hesitating, to be sure the approach from the west was clear before returning attention to the front and left. The driver's focus westward then southward towards the crossing placed the train approaching from the east in the driver's peripheral vision, where the absence of retinal image motion made detection unlikely until the driver looked to the left, having already entered the hazard zone.
2.3 Train horn audibility
Despite their proven effectiveness, train horns are considered to be a secondary alerting system. Research has shown that horn location and train speed can compromise train horn audibility and its effectiveness as a hazard mitigation option.Footnote 31 Train horn performance is also affected by other factors, including dampening of sound through the road vehicle shell and background noise within the vehicle. The present regulatory requirements specify that the locomotive horn must be capable of producing a minimum sound level of 96 dB(A) at a distance of 100 feet.
In this occurrence, once the locomotive crew realized that the van may not be stopping, they applied a long continual burst of the train horn until the train occupied the crossing. However, the van windows were closed, resulting in a sound loss of about 30 dB(A). The background noise within the van was estimated to be at least 67 dB(A).
The occurrence locomotiveFootnote 32 was configured with a 3-flute, mid-mounted horn, and was travelling at 53 mph. The overall sound pressure level of a horn of that type as measured in front of a moving train is reduced by about 18 dB(A) between 13-14 degrees off the locomotive centerlineFootnote 33 compared to a stationary measurement. When the difference in elevation between the train and the van is considered, the sound pressure level at the van's position may have been further reduced.
Therefore, with the train located 100 feet from the van, the signal-to-noise ratio (SNR) of the train horn was calculated to be only −1 dB(A). Although each halving of distance between the train horn and the car increases the SNR by 6 dB(A), even with the train located 12.5 feet from the van, the SNR of the train horn would have been only 17 dB(A), which would have been virtually inaudible within the van. The van shell, closed windows, ambient noise, and background conversation within the van reduced the train horn audibility and the van occupants' ability to hear the horn. Although a locomotive horn can be a useful defence at passive crossings, this accident demonstrates that unless the driver and passengers are actively listening for the train horn, the sounding of the horn is not always effective at warning of an approaching train, which increases the risk of a crossing accident.
2.4 Driver experience and fatigue
The driver was 1 week away from a 16th birthday and was scheduled to take the on-road portion of the driver's licence examination shortly after returning to Alberta. The driver had been operating various vehicles for at least 2 years and was experienced with the mechanics of vehicle operation. However, the driver's prior experience with travelling over uncontrolled crossings was limited to the infrequent use of the occurrence crossing when visiting in the Broadview area. Therefore, regardless of age, the driver was only marginally experienced with the risks associated with negotiating passive crossings protected solely by standard railway crossing signs (SRCS).
Young novice drivers are slower at detecting hazards and identify fewer hazards than experienced drivers. This is especially true for hazards that are located further away. Experienced drivers tend to extend the spread of horizontal and vertical visual scanning in hazardous driving situations, while less experienced drivers do not normally demonstrate the same flexibility in scanning behaviour.
Driver performance decrements associated with periods of prolonged wakefulness and disruptions to the circadian rhythm have been cited in both research literature and a number of previous TSB reports. In these cases, fatigue related to either or both conditions is known to produce detriments in both driver performance and cognitive functioning. Such impairments can impact not only the mechanical skills of keeping a vehicle on the road, but also the ability to assess risk and to perform forward planning.
On the morning of the occurrence, the driver woke up earlier than the normal wake time. The driver had only 5.25 hours of night time sleep prior to the trip, which was 3.25 hours less than the recommended average sleep duration for teenagers, and 2.25 hours less than the usual duration of the driver's nighttime sleep. While there were opportunities for the driver to nap in the van during the first leg of the trip between home and Chestermere and again travelling between Swift Current and Regina, daytime sleep is of poorer quality, and is less restorative, than nighttime sleep. The quality of sleep would be further degraded by the challenges of sleeping in a moving van with 4 other passengers. As a result, it is possible that, at the time of the accident, the driver was experiencing a sleep debt of at least 2.25 hours and was slightly fatigued.
In addition, SD1 did not have sufficient restorative sleep to compensate for 22.75 hours of continuous wakefulness prior to the start of the trip, and was likely fatigued at the time of the accident.
While the reduced sightlines east of the crossing would have presented challenges even for an experienced driver, the driver's inexperience with the risks associated in negotiating passive crossings protected solely by SRCS and the fatigued state of the supervising driver likely contributed to the accident.
2.5 Identification and management of sightline deficiencies
In compliance with the Rules Respecting Track Safety, railways conduct ongoing inspections of their tracks to ensure that they are safe for railway operations. However, monitoring crossing sightlines during regular track inspections is a secondary activity, and is not always effective at evaluating sightline obstructions from the roadway.
In addition to track inspections, CP has implemented a regional vegetation management program that is designed for brush cutting and herbicide application to coincide with historical vegetation growth rates. The plan can be adjusted according to staff inspections as well as communications with the regulator or local authorities. However, in practice, CP requires a detailed crossing inspection only following an accident at that location. There is no formal process in place to ensure that all passive crossing sightlines are inspected at least annually.
TC conducted a detailed inspection of the crossing a year before the accident. Although the sightlines were compromised and did not meet Guideline G4-A requirements at that time, TC determined that the sightlines were adequate and did not require any mitigation; it did not notify the railway. By the time brush cutting crews arrived on the Broadview Subdivision, records indicate that the accident crossing, and at least 12 other high-priority locations, already had obstructed sightlines. In both of these cases, the railway and the regulator activities were conducted on a reactive basis. If sightline maintenance activities for passive level crossings are reactive, sightline obstructions may not be addressed until after they have compromised a driver's ability to assess whether or not a train is approaching, which increases the risk of an accident.
2.6 Human factor challenges in negotiating passive crossings
As drivers approach a crossing, they must complete a number of physical and cognitive tasks necessary to recognize the crossing, identify the presence of a train, determine its motion, and take appropriate defensive action. These tasks must be completed before the driver enters the non-recovery zone, which is the point of no return. These tasks are undertaken in an environment which can involve driver expectations, distractions, and obstructions.
Some factors, such as the position of the sun or the vegetation growth, are subject to seasonal or time-of-day variations. When a driver approaches a crossing, other factors, such as the learned expectation that a train is most likely not present and the idea that on the prairies, approaching trains are easy to see and train speed is easy to estimate, are always present. These factors need to be offset by efforts to ensure that trains are conspicuous to drivers assessing crossing risk. In this case, a limited approach distance, due to the close proximity of the highway to the crossing, the driver's perceived clear view of the track from the highway, and the limited sightlines available once the vehicle turned onto Airport Road all likely influenced the driver's actions.
To add to the complexity of the issue, the driver perception reaction time (PRT) must also be considered. As PRT is prolonged, the onset of braking is delayed. The further braking distance is displaced into the hazard zone, the greater the likelihood of a collision. TC Guideline G4-A is based on a driver PRT of 2.5 s. This time is based on the assumptions that a train horn is heard or that active collision indicators, such as brake lights from a car ahead or railway crossing AWD lights, are in front of the driver.Footnote 34 However, these assumptions do not always apply when approaching a passive railway crossing protected by SRCS alone, because there is not necessarily a train occupying the crossing, there may not be a vehicle ahead, there may be no AWD protection, and the train horn is not always audible.
At a passive level crossing, unless the train is already in the driver's field of view, the PRT must also include the scanning time for the driver to look left and right for a possible train. As demonstrated by this accident, when the time for scanning activities is included, a more realistic PRT for this passive level crossing protected solely by SRCS is estimated to be 4.5 s.
Considering the 4 zones drivers encounter when approaching a passive crossing equipped only with SRCS, when a 4.5 s PRT is used to calculate the optimal required sightline distance at this crossing (Figure 4) and is compared to minimum G4-A sightlines (Figure 4, hatched area), a significant proportion of vehicle/driver approaches (i.e., up to 83%) could potentially result in inadequate sightlines.
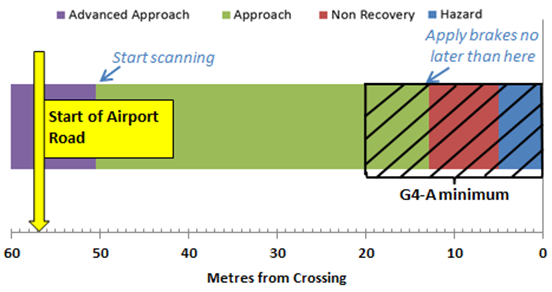
The current use of 2.5-s PRT in calculating the G4-A minimum sightline distances for passive level crossings equipped only with SRCS underestimates the stopping sight distance required for drivers to visually search for trains in 2 directions and initiate a response. Consequently, if all factors affecting driver behaviour are fully considered, the clear view areas established in the G4-A guideline using a 2.5-s PRT may not always be sufficient to ensure that vehicle drivers have sufficient time to assess all risks and respond appropriately when approaching a passive crossing protected solely by SRCS, which increases the risk of a vehicle/train collision.
2.7 Defense in depth at passive crossings protected solely by standard railway crossing signs
In Canada, over a period of 10 years (from 2003 to 2012), 658 accidents involving vehicles occurred at public passive crossings, resulting in 59 fatalities and 107 serious injuries. The economic and societal outcomes of level crossing accidents are substantial and can be devastating, making them one of the top safety concerns among road and rail authorities worldwide.Footnote 35, Footnote 36, Footnote 37
Railway safety is predicated on a defence-in-depth concept. For passive crossings, this includes:
- SRCS located at the crossing indicating that vehicle drivers must yield the right of way to a train,
- adequate crossing sightlines to provide vehicle drivers with enough advance warning to react, and
- activating the train horn to warn drivers of the train's approach.
Since trains have the right of way at all crossings and there is little that can be done to slow a train on a collision course with a vehicle at a crossing, the actions required to prevent an accident are primarily in the hands of the vehicle operator. Railways are responsible for ensuring that sightlines are adequate and that train horns are operable. The regulator is responsible for establishing crossing safety regulations and standards as well as ensuring that identified threats to crossing safety are addressed. The road authority shares the responsibility, and also has a role to play in crossing safety.
In most cases on the prairies, passive level crossings are encountered primarily at locations where the frequency of trains or vehicle traffic is low. In these situations, the likelihood of a vehicle driver encountering a train and, consequently, the driver's perceived risk of the approach are reduced. However, in practice, there may be a greater risk of an accident at crossings protected solely by SRCS where the frequency of trains or vehicle traffic is low.
This investigation has identified that when a train is not visible to the driver until the vehicle is well into the non-recovery zone, the risk of collision is elevated. Even if vehicle occupants do not see the approaching train, there is a general expectation that the locomotive horn will warn drivers of the train's approach. However, as demonstrated in this occurrence, the locomotive horn is not always audible to drivers. This suggests that, at rural passive crossings protected solely by SRCS, the present defence-in-depth system does not always function as intended, increasing the risk of crossing accidents at these locations.
2.8 Implementation of low-cost passive crossing alert systems
Over the last decade, substantial research has demonstrated that improvements in driver training regarding passive crossings can benefit drivers. However, most drivers do not encounter passive crossings frequently enough to put into practice and reinforce the behaviour taught in driver training. On the prairies, where there is a perception that one can see for miles and trains are rarely seen by drivers when approaching a crossing, a strong mental model develops; the expectation is that there will be no train present. To overcome this expectation bias, sightlines need to be adequate and a train needs to be visible, recognized, and judged to be approaching. To that end, the development and use of low-cost advance active warning devices to alert drivers of a train's presence may present a more effective alternative defence for passive level crossings.
Studies have demonstrated that lower-cost, active advance warning signs are effective at decreasing approach speeds and collisions at passive level crossings.Footnote 38 These studies suggest that the key to improving passive crossing safety is to equip more crossings with such devices in order to attract driver attention and provide drivers with advance warning of an approaching train. This would be especially true at locations where sightlines are less than optimal. Several promising systems have been tested:
- In Canada, “walk light” grade crossing warning systems have been installed at some private crossings in signalled territory. Their use could be expanded to public passive crossings in rural settings.
- Train detection technologies based on GPS, magnetic flux (e.g., wheel sensors), and radar appear to be close to commercial viability; other technologies found in features already deployed for use in automobiles or fixed roadway installation show promise in being adapted for passive crossing protection.
Safety defences at passive railway crossings do not always function as intended. In the absence of low-cost alert systems, the risk of accidents at passive crossings will continue.
2.9 Graduated driver licensing guidance materials
In this occurrence, the trip planning among the 3 drivers, with respect to breaks and alternating drivers, followed the general guidance offered within Alberta's graduated driver licensing (GDL) program. During the trip, the driver operated the vehicle according to the Stage 1 terms of Alberta's GDL program with an appropriately licensed individual (SD1) in the front passenger seat. The holder of an Alberta GDL Stage 1 driver's licence is allowed to carry additional passengers and to drive in Saskatchewan under the same terms.
The GDL program in Alberta, in common with other provincial and territorial GDL programs, provides only basic guidance on approaching uncontrolled railway crossings and focusses on reinforcing trains' right-of-way. The guidance does not indicate that most people underestimate train speed and that train horns may be inaudible inside a moving car with the windows up.
Although the GDL program recommends that all drivers be well rested before starting their trip, it does not highlight that teenagers generally require more sleep than adults, and that adults need at least 8 hours of sleep per night for restorative sleep. The Alberta GDL program does not provide sufficient information on the risks related to railway crossings with passive warning systems, the underestimation of train speeds, train horn audibility, and performance decrements due to extended periods of wakefulness.
2.10 Vehicle data recorders
Most automobile data recorders are not specifically designed for accident investigation purposes and have not proven to be a reliable data source for that purpose. Rather than continually recording information, any data recorded for the van is transferred to the non-volatile memory only when the powertrain control module (PCM) receives a signal from the seat belt pre-tensioner or when the airbag is deployed. The PCM also requires power for a few tenths of a second after a collision in order to preserve the data.
In this accident, although the seat belt pre-tensioner applied and the van's airbags deployed, the PCM did not receive a signal, and the accident data was not saved. It is likely that the communication line in the vehicle's control network was severed during the initial impact with the train, which occurred prior to the air bag deployment signal and prevented restraint control module (RCM) data from being communicated to the PCM. Consequently, the van recorders contained no retrievable data, and key information which may have assisted the investigation was not available.
2.11 Locomotive forward-facing video cameras
The railway industry's adoption of forward-facing video cameras has proven to be a valuable tool. For this investigation, frame-by-frame analysis of the video captured by the locomotive forward-facing video camera provided reliable, independent, and objective information to establish the sequence of events. The recorded video provided sufficient information to document the sightline conditions approaching the crossing and to establish the speed, acceleration, and position of the van relative to the train in the moments before the accident. The installation and reliable recording of the forward-facing video camera on the lead locomotive was instrumental in understanding the circumstances leading to this accident.
2.12 Regulatory overview
Transport Canada (TC) is currently consulting on proposed Grade Crossing Regulations pursuant to the Railway Safety Act. These regulations have been in the draft stage for nearly 25 years, during which there has been ongoing dialogue with the industry as well as provincial and municipal authorities. In the interim, draft standards in RTD-10, which sets out best engineering practices and operating procedures for safety at crossings, have been widely used as a guideline in the industry. However, until sightlines are required to be maintained at all times, unsafe crossings will continue to present a risk to railway employees and the travelling public.
3.0 Findings
3.1 Findings as to causes and contributing factors
- The collision occurred when the van, the occupants of which were initially unaware of the approaching train from the east, proceeded into the path of the train and was struck broadside.
- The vegetation maintenance east of the crossing was insufficient to ensure that the available sightline in that direction met the Transport Canada G4-A guideline.
- Vegetation along the right-of-way obstructed the sightlines for both the train crew looking westward and the driver looking eastward from Highway 1 as the van turned onto Airport Road and travelled along the roadway approach to the crossing.
- Train movements throughout the journey were predominantly observed approaching from the west (eastbound), so the driver and the fully licensed supervising driver looked westward and likely became focussed on detecting eastbound trains.
- The drivers' focus westward then southward towards the crossing placed the train approaching from the east in the driver's peripheral vision, where the absence of retinal image motion made detection unlikely until the driver looked left after having entered the hazard zone.
- The van shell and closed windows, as well as the ambient noise and background conversation within the van, reduced the train horn audibility and the van occupants' ability to hear the horn.
- The driver's inexperience with the risks associated in negotiating passive crossings protected solely by standard railway crossing signs as well as the fatigued state of the supervising driver likely contributed to the accident.
3.2 Findings as to risk
- Train horns are not always effective at warning of an approaching train, which increases the risk of a crossing accident.
- If sightline maintenance activities are reactive, sightline obstructions may not be addressed until after they have compromised a driver's ability to assess whether or not a train is approaching, which increases the risk of an accident.
- If all factors affecting driver behaviour are fully considered, the clear view areas established in the G4-A guideline using a 2.5-s perception reaction time may not always be sufficient to ensure that vehicle drivers have adequate time to assess all risks and respond appropriately when approaching a passive crossing protected solely by standard railway crossing signs, which increases the risk of a vehicle/train collision.
- Safety defences at passive railway crossings do not always function as intended. In the absence of low-cost alert systems, the risk of accidents at passive crossings will continue.
- If sightlines are not required to be maintained at all times, unsafe crossings will continue to present a risk to railway employees and the travelling public.
3.3 Other findings
- The Alberta graduate driver licensing program does not provide sufficient information on the risks related to railway crossings with passive warning systems, the underestimation of train speeds, train horn audibility, and performance decrements due to extended periods of wakefulness.
- The van recorders contained no retrievable data; key information which may have assisted the investigation was not available.
- The installation and reliable recording of the forward-facing video camera on the lead locomotive was instrumental in understanding the circumstances leading to the accident.
4.0 Safety action
4.1 Safety action taken
4.1.1 TSB Rail Safety Information Letter
On 26 October 2012, the TSB issued Rail Safety Information Letter (RSI) 13/12 to Transport Canada (TC). The RSI indicated that about 1 year prior to the accident, a TC crossing inspection recorded a sightline of 150 m (500 feet) in the northeast quadrant at a distance of 30 m north of the crossing. This information had not been communicated to the railway or road authority.
TSB examination following the accident revealed clusters of trees and bushes on the north side of the railway right-of-way, east of the crossing. For eastbound vehicles on Highway 1 and for vehicles turning south onto Airport Road, the vegetation obscured the driver's view of an approaching westbound train and limited the driver sightline towards the east to less than 700 feet. For the conditions at that location, the G4-A Guideline for minimum sightlines at passive crossings suggests that a clear view of the track for a distance of 273 m (900 feet) in both directions is required. The RSI suggested that since vegetation control near passive crossings protected solely by standard railway crossing signs (SRCS) is essential to safe railway and vehicle operations, inspection and maintenance programs should be sufficiently robust to ensure that crossing sightlines are proactively monitored and maintained.
On 4 December 2012, TC responded and suggested that the “minimum” distance of 20 m should apply and that roadway speed be estimated at 20 km/h. TC also suggested that the obstructed sightlines were the result of vegetation growth since the last TC inspection and concluded that, at the time of the inspection, “desirable” sightlines were marginally met for a vehicle traveling at 30 km/h and were more than double the “minimum” distance required for an estimated vehicle speed of 20 km/h, due to the proximity to a highway intersection. Consequently, at the time of inspection, TC concluded that a vehicle driver would have adequate opportunity to observe a train approaching the crossing at its maximum allowable speed and that, as such, there was no need to contact the responsible authorities.
4.1.2 Transport Canada research regarding hybrid crossing warning systems
TC indicated that the Grade Crossing Regulations are expected to come into force in the fall of 2014, and are expected to contain an objective-based provision mandating the maintenance of sightlines at all times. When they come into effect, the regulations will clarify the responsibilities for the inspection of sightlines and corrective action.
The TC Rail Safety Directorate is working with the Transportation Development Centre (TDC) to implement a research project to further develop hybrid crossing warning systems for railway–highway grade crossings in Canada. The main objective of this project is to develop an intermediate grade crossing warning system between conventional passive (i.e., just passive signal) and full-scale active warning systems (i.e., signals, flashing lights, bell, and gates). The project will be conducted in 2 major phases:
- The first phase of the project is an international literature review, and identification and assessment of hybrid warning safety systems for railroad grade crossings. The review will assess hybrid warning systems for grade crossings being currently deployed, planned for deployment and considered for deployment in, but not be limited to, Australia, the United States, Great Britain, and mainland Europe. Hybrid warning and alerting systems for road–road intersections will also be evaluated. The literature review report is tentatively scheduled for completion by October 2014.
- The second phase of the project will include the following major elements:
- Risk and selection assessment criteria will be developed to identify the most effective hybrid warning/alerting systems for mitigating risks at grade crossings. This would include cost–benefit analysis and/or cost-effectiveness models used in comparing and selecting the best hybrid warning/alerting systems.
- Review of all pertinent standards and guidelines (federal and provincial levels) related, but not limited to, the performance, design and application of grade crossing warning/alerting safety systems in Canada, for all grade crossings.
- Recommendation of hybrid safety warning systems that could be deployed at selected Canadian railroad grade crossings. The conclusions and recommendations of hybrid safety warning systems report are tentatively scheduled for completion by March 2015.
4.2 Safety action required
4.2.1 Safety concern — Passive crossing protection
Railway safety is predicated on a defence-in-depth concept. For passive crossings, this includes:
- SRCS located at the crossing indicating that vehicle drivers must yield the right-of-way to a train;
- adequate crossing sightlines to provide vehicle drivers with enough advance warning to react; and
- activating the train horn to warn drivers of the train's approach.
In Canada, over a period of 10 years (from 2003 to 2012), 658 accidents involving vehicles occurred at public passive crossings, resulting in 59 fatalities and 107 serious injuries.
As demonstrated in this occurrence, safety defences at passive railway crossings do not always function as intended. The train's horn did not provide an effective warning and the sightlines obstructed the driver's view of the oncoming train. Consequently, the van did not yield and was struck by the train.
Guideline G4-A has become the standard employed by regulators, railways, and road authorities to assess and maintain adequate sightlines for drivers at passive railway crossings. The guideline uses a 2.5-s driver perception reaction time (PRT) to estimate the distance from the crossing a driver needs to be in order to scan for and yield to an approaching train. However, Long and Nitsch (2008) have demonstrated that the 2.5-s PRT does not account for the time necessary to scan for an approaching threat when it is not in the driver's immediate field of view. To do so sometimes requires a longer driver PRT.
Transport Canada (TC) accepts that a 2.5-s PRT does not address all circumstances but contends that it generally reflects the response time required for 9 out of every 10 drivers encountering an intersection. While this may be true for roadway intersections where a traffic light or other stimulus is directly in the driver's field of view, it is not appropriate for passive railway crossings, where additional scanning is necessary. As demonstrated by this accident, when the time for scanning activities is included, a more realistic PRT for the passive level crossing was estimated to be 4.5 s. In these situations, some form of additional crossing protection is required to compensate for the PRT shortfall.
One additional form of crossing protection sometimes used is a stop sign installed on or before the SRCS. In this case, stop signs were installed at the crossing as well as a number of other passive crossings in the vicinity following the accident. While stop signs may reduce some of the risks related to sightlines, it could also generate other risks. For instance, at this location, the north approach is a gravel 5.1% gradient with 60 mph (100 km/h) track speed in close proximity to the highway. This could present a risk of stopped vehicles becoming a highway obstruction, or of large heavy trucks having difficulty negotiating the crossing from a full stop.
Furthermore, current research does not consider stop signs to be the most effective solution: they require frequent enforcement activity to have an ongoing benefit, and do not address the road user's expectation that a train will not be present. The research points to the development of low-cost active alert systems (such as GPS, magnetic flux, and radar) that are already being used for related applications and have been demonstrated to decrease passive crossing speeds and collisions. Such systems can be stand-alone, or take advantage of existing smart systems in modern vehicles, locomotives, and wayside signal systems to provide drivers with advance warning of a passive crossing and the presence of a train.
It is commendable that TC has commenced work on developing hybrid crossing warning systems for railway/highway grade crossings, but it is still early in the development stages. Once research is complete, should TC require upgraded warning systems, regulatory changes would be many years away.
Considering the serious consequences that can result from a crossing accident, and the technological advancements that have been made, the Board is concerned that, in the absence of timely implementation of low-cost alert systems, the risk of accidents at passive crossings will continue.
This report concludes the Transportation Safety Board's investigation into this occurrence. the Board authorized the release of this report on . It was officially released on 26 March 2014.
5.0 Appendices
Appendix A – Transport Canada Guideline G4-A
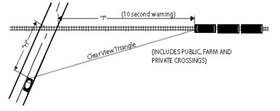
| Maximum Speed (km/h) for vehicule | Distance* <<H>> | |
|---|---|---|
| Desirable (meters) | Minimum (meters) | |
| Stop | 8 | -- |
| 20 | 20 | 15 |
| 30 | 30 | 20 |
| 40 | 45 | 35 |
| 50 | 65 | 50 |
| 60 | 85 | 70 |
| 70 | 110 | 90 |
| 80 | 140 | 120 |
| 90 | 170 | 145 |
| 100 | 200 | 175 |
| Maximum Train Speed (m/h) | Distance <<T>> | |
|---|---|---|
| feet | (meters) | |
| Stop | 100 | (30) |
| 20 | 300 | (91) |
| 30 | 450 | (136) |
| 40 | 600 | (182) |
| 50 | 750 | (227) |
| 60 | 900 | (273) |
| 70 | 1050 | (318) |
| 80 | 1200 | (364) |
| 90 | 1350 | (409) |
| 100 | 1500 | (455) |
* To be increased as required by Notes 3 and 4 below.
To Establish Required Clear View Area
- Use maximum allowable train and vehicule speeds.
- View between 1.1 m above road (eye level) to track.
- Where gradients within 8 m of rail exceed 5% or heavy or long vehicules regularly cross, clear view from a vehicule stopped at the crossing must also extend a minimum of 50% beyond “T”, and more if necessary, so stopped vehicules have sufficient time to start up and cross safely.
- Where heavy vehicles operate on long descending approaches, increase “H” to ‘stopping sight distances’.
- If clear view cannot be acheived for existing speeds, reduce speed of vehicules ot trains until such times as an automatic warning system can be installed.
Source: Transport Canada, Minimum Railway/Road Crossing Sightline Requirements For All Grade Crossings Without Automatic Warning Devices G4-A, https://www.tc.gc.ca/eng/railsafety/guideline-280.htm (last accessed on 25 March 2014).