Loss of separation
NAV CANADA Vancouver Area Control Centre
Vicinity of Kelowna, British Columbia
The Transportation Safety Board of Canada (TSB) investigated this occurrence for the purpose of advancing transportation safety. It is not the function of the Board to assign fault or determine civil or criminal liability. This report is not created for use in the context of legal, disciplinary or other proceedings. See Ownership and use of content. Masculine pronouns and position titles may be used to signify all genders to comply with the Canadian Transportation Accident Investigation and Safety Board Act (S.C. 1989, c. 3).
Summary
On 03 January 2019, a WestJet Encore Bombardier DHC-8-402 (Q400) aircraft (registration C-FSWE, serial number 4517), operating as flight 3109 (WEN3109), was conducting an instrument flight rules flight from Calgary International Airport, Alberta, to Nanaimo Airport, British Columbia. At about the same time, a privately registered Piaggio P.180 aircraft (registration N990RS, serial number 1015) operated by Rainbow Sandals Retail Incorporated, was conducting an instrument flight rules flight from Spokane International Airport, Washington, United States, to Kamloops Airport, British Columbia.
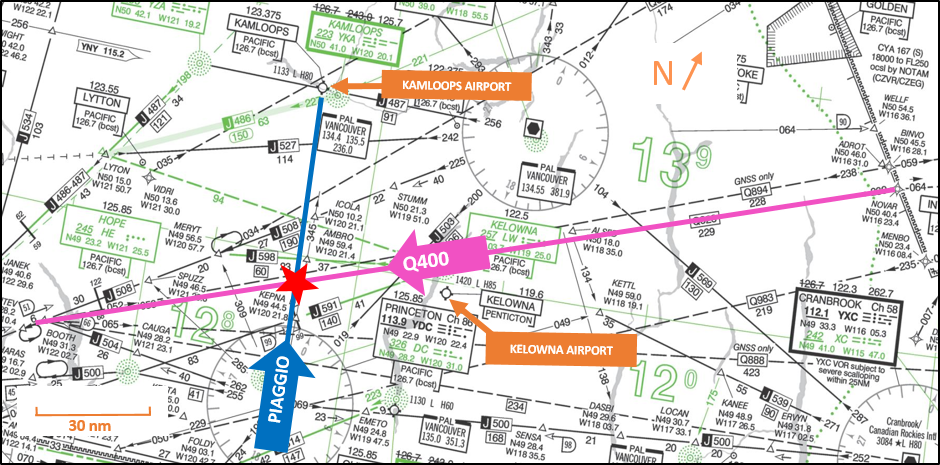
The Q400 was flying in a southwesterly direction from the northeast of Kelowna, British Columbia. The Piaggio was flying in a north-northwesterly direction from the south of Kelowna. Both aircraft were operating at flight level 220, and their flight paths would cross to the west of Kelowna.
At 1021:11 Pacific Standard Time, when the aircraft were west of Kelowna, a loss of separation occurred when the required vertical separation minimum of 1000 feet or lateral separation minimum of 5 nautical miles was not maintained. At that time, the aircraft were at the same altitude and less than 5 nautical miles from each other on converging tracks. At 1021:20, the Q400 flight crew received and responded to a traffic alert and collision avoidance system resolution advisory to descend. At approximately the same time, the Piaggio P.180 received a traffic advisory. At 1021:49, there was 1000 feet of vertical separation and 0.9 nautical miles of lateral separation between the 2 aircraft. Both flights continued to their destinations without further incident.
1.0 Factual information
1.1 Background
The Vancouver Area Control Centre (ACC) airspace is divided into several specialties, including the Airports Specialty. The Airports Specialty includes the Kamloops (KA) sector and the Kelowna (LW) sector. At the time of the occurrence, there were only a few aircraft inbound to land at Kelowna International Airport (CYLW), and so the LW sector was combined with the KA sector as the KALW sector. See section 1.3.2 for more information about the Vancouver ACC airspace.
Air traffic services surveillance separation was being applied in the KALW sector airspace.
1.2 History of the flights
A WestJet Encore Bombardier DHC-8-402 (Q400) aircraft (registration C-FSWE, serial number 4517), operating as flight 3109 (WEN3109), was conducting an instrument flight rules (IFR) flight from Calgary International Airport (CYYC), Alberta, to Nanaimo Airport (CYCD), British Columbia (BC).
At about the same time, a privately registered Piaggio P.180 aircraft (registration N990RS, serial number 1015), operated by Rainbow Sandals Retail Incorporated, was conducting an IFR flight from Spokane International Airport (KGEG), Washington, United States, to Kamloops Airport (CYKA), BC.
The Q400 was flying in a southwesterly direction from the northeast of CYLW. The Piaggio was flying in a north-northwesterly direction from the south of CYLW. Both aircraft were operating at flight level (FL) 220.Footnote 1 Their flight paths would cross to the west of CYLW (Figure 1).
1.2.1 Sequence of events
At 0946:37,Footnote 2 the Q400 flight crew contacted the KALW sector controller and informed him that their flight was operating at FL 220. The KALW sector controller acknowledged this information.
On the KALW sector controller’s Extended Computer Display System (EXCDS),Footnote 3,Footnote 4 the Q400’s flight data entry (FDE)Footnote 5 was posted in the active panelFootnote 6 for YNY (Enderby),Footnote 7 because YNY was the approximate location where the aircraft entered the KALW sector airspace. The Q400’s FDE displayed the correct information.
At approximately 0950, a second controller began monitoring the KALW sector controller position in preparation for a transfer of position responsibility at the KALW sector.
At 0953:36, the Piaggio’s FDE appeared in the EXCDS inbox panel for the KALW sector.Footnote 8 The Piaggio’s FDE displayed the correct flight information.
At 0953:46, a transfer of position responsibility began at the KALW sector controller position. During the verbal briefing, the outgoing controller pointed to the Q400 on the Canadian Automated Air Traffic System (CAATS) Situation Display (CSiT)Footnote 9 with the mouse and told the incoming controller that the aircraft was an overflight (an aircraft transiting the KALW sector airspace without the intention of landing). Following the verbal briefing, the incoming controller confirmed that he had control responsibility of the KALW sector controller position. The outgoing controller monitored the KALW sector controller for approximately 1 minute and then left the operations room.
At 0957:57, the KALW sector controller moved the Piaggio’s FDE from the EXCDS inbox and posted it to the active panel for Penticton Airport (CYYF) because the Piaggio would enter the airspace for CYYF first, once it had entered the KALW sector airspace (Figure 2).

Legend
1 The Piaggio’s flight data entry (FDE).
2 The active panel for Penticton Airport (CYYF).
3 The Piaggio’s FDE in the Extended Computer Display System (EXCDS) inbox. The FDE was moved from here to the active panel for CYYF.
4 The EXCDS inbox.
5 The YNY (Enderby) active panel.
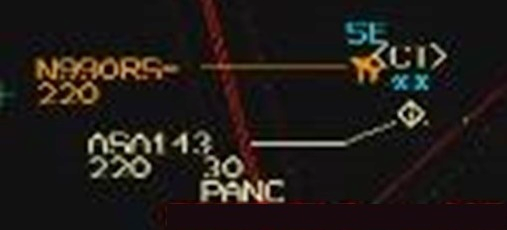
At 1000:00, the Piaggio’s target appeared on the CSiT. At 1000:14, the KALW sector controller observed a problem with the target: the Piaggio was in fact displayed as 2 targets. One target was showing as Air Alaska flight 143 (ASA143) en route to Ted Stevens Anchorage International Airport (PANC), Alaska, United States, and a 2nd target displayed as N990RS, which was the Piaggio’s registration. The correct target was the one showing as ASA143; this target had a CAATS disparity errorFootnote 10 associated with it, indicated by the notation < CT > (Figure 3).
At 1000:54, the KALW sector controller contacted the SeattleFootnote 11 controller who had control responsibility for the Piaggio.
At 1003:40, the KALW sector controller moved the mouse over to the Q400’s data tag on the CSiT; however, at this point there had been no verbal communication between the controller and the Q400.
At 1006:35, the Seattle controller contacted the KALW sector controller to coordinate a verbal transfer of control responsibility of the Piaggio. The KALW sector controller asked the Seattle controller if the Piaggio had its transponder set to code 3565; the Seattle controller confirmed that it did.
After the KALW sector controller informed the Seattle controller that the Piaggio had been radar identified at 1006:47, he asked the Seattle controller if he could change the Piaggio’s transponder code once the aircraft had been changed to his frequency. The Seattle controller approved this action.
At 1007:24, the Piaggio pilot contacted the KALW sector controller and informed him that their flight was operating at FL 220. The KALW sector controller acknowledged this information and asked the pilot to set the aircraft’s transponder code to 3565. At 1007:35 the Piaggio pilot confirmed that the aircraft’s transponder was set to code 3565.
At 1013:56, the Piaggio pilot asked the KALW sector controller for the Kamloops weather. The KALW sector controller stated that he would have the weather for him momentarily.
At 1016:27, the Piaggio pilot requested a lower altitude from the KALW sector controller, who stated that he would get the pilot a lower altitude shortly. The KALW sector controller wanted to resolve the error with the Piaggio’s transponder code before giving the pilot the Kamloops weather information and then starting the aircraft’s descent to conduct an approach to land at CYKA.
Shortly afterward, at approximately 1017, the KALW sector controller asked the previous KALW controller, who had returned to the operations room for an unrelated reason, to help him resolve the error with the Piaggio’s transponder code because he was busy controlling the aircraft under his responsibility, getting the weather information, and addressing the transponder code.
The other controller requested a new transponder code to be assigned to the Piaggio in the CAATS flight data processors (FDPs). At 1017:33, the Piaggio’s transponder code changed from 3565 to 2606 in the CAATS FDPs.
Approximately 1 minute and 30 seconds later, the other controller informed the KALW sector controller of the Piaggio’s new transponder code and remained nearby until the new transponder code was transmitted to the Piaggio pilot, to ensure that this would fix the error.
At 1020:12, a Predicted Conflict Alert – Traffic (TFC)Footnote 12 appeared in the data tags for the Q400 and the Piaggio (the data tag showing the Piaggio as flight ASA143) on the KALW sector controller’s CSiT. The KALW sector controller was communicating with another aircraft and looking at its flight plan and did not see the visual alert or hear the associated audible alarm for the TFC alert.
At 1020:58, the KALW sector controller instructed the Piaggio pilot to change the aircraft’s transponder code to 2606 and told him there were problems with his flight plan in the CAATS system. At 1021:05, the Piaggio pilot acknowledged the change in transponder code and asked for the Kamloops weather a 2nd time.
At about the same time, the Q400 flight crew observed an aircraft target, the Piaggio, on its traffic alert and collision avoidance system (TCAS).Footnote 13 The target displayed on the TCAS was at approximately their aircraft’s 11 o’clock position, 6 nautical miles (NM) from their aircraft and flying north toward them. One second later, the Q400 TCAS provided a traffic advisory (TA) to the flight crew. The target displayed on the TCAS remained at approximately the aircraft’s 11 o’clock position. It was 5.3 NM from their aircraft and continued flying toward them.Footnote 14 The Q400’s pilot flying asked the pilot monitoring to query air traffic control regarding the traffic.
At 1021:07, the KALW sector controller informed the Piaggio pilot that he would get the weather for him and diverted his attention to a secondary screen where the weather was displayed.
At 1021:11, the TFC alert on the Piaggio’s and the Q400’s data tags changed to a conflict (CON) alert,Footnote 15 and a loss of separation between the Piaggio and the Q400 occurred. The aircraft were at the same altitude and less than 5 NM from each other, whereas the minimum separation required was 1000 feet verticallyFootnote 16 or 5 NM laterally.Footnote 17 The CSiT displayed a visual alarm and emitted an audible alarm, but the KALW sector controller did not see or hear these alarms.
Three seconds later, the KALW sector controller began transmitting the Kamloops weather to the Piaggio pilot.
At 1021:20, the Q400’s TCAS provided a resolution advisory (RA) instructing the flight crew to descend. The Piaggio was now 3.9 NM from the Q400 and flying toward it.Footnote 18
At 1021:21, the Piaggio’s flight data and radar track correlated, and the correct aircraft information was displayed on the CSiT.Footnote 19
At 1021:30, in response to the TCAS RA, the Q400 began its descent. When it was descending through an altitude of 21 946 feet, the Piaggio was 3 NM from the Q400 and continued flying toward it at FL 220. As the Q400 began its descent from FL 220, the closest point of approach (CPA)Footnote 20 was predicted to occur 28 seconds later.Footnote 21 The Piaggio’s TCAS provided a TA for the Q400. The Piaggio pilot saw the Q400 and remained at FL 220.
At 1021:33, the KALW sector controller finished providing the Kamloops weather to the Piaggio pilot. Two seconds later, the Q400 flight crew informed the KALW sector controller that they had received a TCAS TA and RA and reported they had the traffic, the Piaggio, in sight. This was the first verbal exchange of information between the Q400 flight crew and the occurrence controller, as the communication at 0946:37 took place with the previous controller. Seven seconds later, the Piaggio pilot reported to the KALW sector controller that he had the Q400 in sight.
At 1021:48, the KALW sector controller informed both aircraft to manoeuvre as required. Eight seconds later, the Q400 flight crew informed the controller that they had visual separation from the Piaggio.
At 1021:49, given that the Q400 had descended in response to the TCAS RA, the 2 aircraft were separated vertically by approximately 1000 feet and horizontally by 0.9 NM. At 1022:45, the Q400 flight crew requested and was authorized by the KALW sector controller to descend to FL 200.
Following the loss of separation, both aircraft continued their flights to their destinations without further incident.
1.3 Air traffic services
1.3.1 Controller information
The air traffic controller involved in this occurrence was licensed and qualified for the operation. The controller had been a controller at the Vancouver ACC Airports Specialty since May 2004.
The investigation, which included a review of the controller’s shift schedule, determined that fatigue was likely not a factor in this occurrence.
1.3.2 Vancouver Area Control Centre airspace
The Vancouver ACC airspace is divided geographically and vertically into several specialties, which are further divided into sectors. The KA sector, which was combined with the LW sector at the time of the occurrence, is part of the Airports Specialty.
The KA sector airspace measures approximately 251 NM by 234 NM and covers approximately 36 000 NM2 of airspace at varying altitudes, as depicted in Figure 4. The grey-shaded area on the map is vertically subdivided into the KA sector airspace and the LW sector airspace. The LW sector controller is responsible for the airspace from surface up to and including 13 000 feet above sea level (ASL), and the KA sector controller is responsible for the airspace above 13 000 feet ASL up to and including FL 250.
Combining the KA and LW sectors meant that the KALW sector controller was responsible for aircraft operating under IFR into and out of CYKA, as well as CYLW, CYYF, Cranbrook/Canadian Rockies International Airport (CYXC), Castlegar/West Kootenay Regional Airport (CYCG), Trail Airport (CAD4), Vernon Airport (CYVK), and Princeton Airport (CYDC). The KALW controller was also responsible for aircraft transiting through the airspace.
![Map of the KA sector airspace within the Airports Specialty of the Vancouver Area Control Centre. Note: the Airports Specialty is also referred to as the Airport Complex. (Source: Adapted from the NAV CANADA <em>Vancouver ACC Unit Operations Manual</em> [effective 31 March 2016], Attachment B: Vancouver ACC Sectorization)](/sites/default/files/eng/rapports-reports/aviation/2019/a19p0002/images/a19p0002-figure-04.png)
Legend
1 Surface up to and including FL 250
2 Above 13 000 feet up to and including FL 250
3 Above 13 000 feet up to and including FL 200
Given the size of the KALW sector airspace, the range of the KALW sector controller’s CSiT was set to 280 NM, so that 1 inch of screen resolution was equal to 14.3 NM. This setting enabled the KALW sector controller to see the entire sector, including flights that were about to enter the sector (Figure 5).

When the range of the CSiT is set at 280 NM, the density of flights on the screen can make aircraft targets appear relatively close together (more than 1 flight in 1 inch of screen). When the TFC220 alert appeared in the Q400’s and the Piaggio’s data tags, there were several other aircraft in their vicinity, adding to the visual clutter on the screen and making the visual alert difficult to detect.
1.3.3 Workload in the sector at the time of the occurrence
At the time of the occurrence, the workload in the Airports Specialty KALW sector was heavy and complex. The KALW sector controller was controlling and coordinating the movement of approximately 18 aircraft, and the EXCDS displayed 13 pending departures at the airports within the KALW sector airspace.
In the 15 minutes prior to the occurrence, a number of situations were increasing the complexity of the operation. The KALW sector controller had been informed that an aircraft on an approach to land at CAD4 might have difficulty landing due to the meteorological conditions. There was also an aircraft holding, waiting to conduct an approach to land at CYCG, that was experiencing moderate icing conditions. While holding, the flight crew had requested a lower altitude due to the icing, but the KALW sector controller could not provide this lower altitude because of the aircraft on approach to CAD4. There was also an aircraft holding near CYKA, waiting for 2 other aircraft to depart before it could conduct an approach. During this complex operation, the KALW sector controller was trying to resolve the problem with the Piaggio’s transponder code.
During the 2 minutes before the TFC alert appeared in both the Q400’s and the Piaggio’s data tags, 12 exchanges of information took place between the KALW sector controller and the aircraft under his responsibility.
At about the same time that the TFC alert displayed in both the Q400’s and the Piaggio’s data tags on the controller’s CSiT, there were 2 simultaneous transmissions from aircraft and a call from the Kelowna tower.
Just after the TFC alert appeared and the KALW sector controller had finished speaking with the Kelowna tower, his attention was diverted to an aircraft that had departed CYKA in accordance with visual flight rules and had requested an IFR clearance to its destination airport.
1.3.4 Staffing considerations in the Airports Specialty
Staffing levels for the Airports Specialty were normal on the day of the occurrence. The KA and LW sectors can be staffed with 1 controller for each sector, or the sectors can be combined so that 1 controller is responsible for both sectors. The NAV CANADA Vancouver ACC Unit Operations Manual states that the team supervisor should open additional control positions or implement traffic management strategies in anticipation of an increase of projected workload. Conversely, to use staff efficiently, team supervisors are expected to close control positions if workload decreases.Footnote 22
When the KALW controller assumed responsibility of the combined KA and LW sectors—30 minutes before the loss of separation occurred—the traffic levels were such that he felt comfortable controlling the combined sectors.
1.4 Air traffic control equipment
The KA sector workstation is set up with a number of displays to help controllers monitor and direct the movement of aircraft, manage communications, and gather information, such as weather updates, to assist pilots (Figure 6).
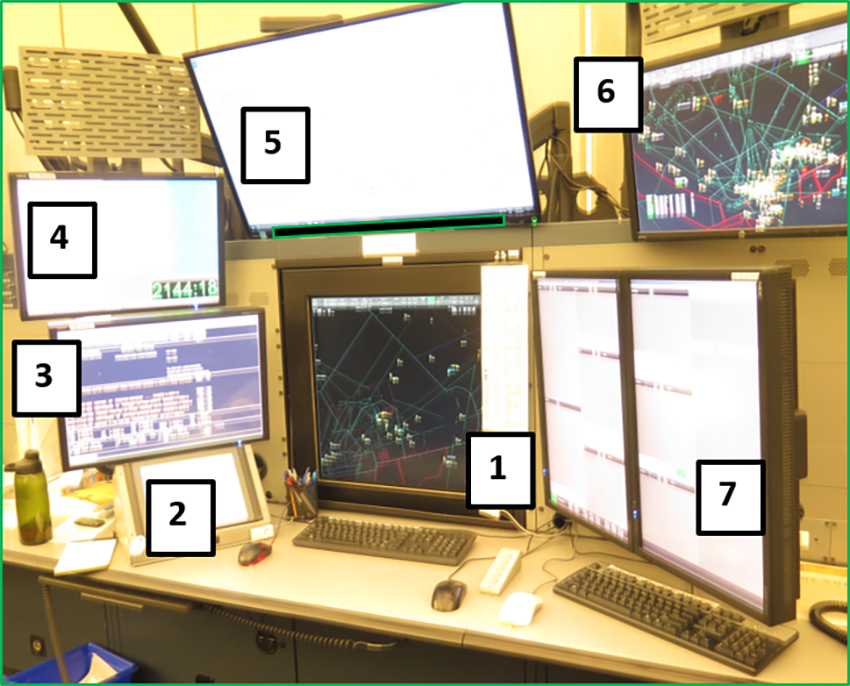
Legend
1 Canadian Automated Air Traffic System (CAATS) Situation Display (CSiT)
2 Voice Switching and Control System (VSCS)
3 Extended Computer Display System Weather Data Element (EXCDS WDE)
4 Computerized Video Information Display System (CVIDS)
5 NAV CANADA Information Display System (NIDS)
6 Peer Display
7 Extended Computer Display System (EXCDS)
The primary displays used by the controller are CSiT (Figure 6, Item 1) and EXCDS (Figure 6, Item 7). They are described in detail in the following sections. The remaining screens are the following:
- The Voice Switching and Control System (VSCS), commonly referred to as the voice switch, is the main platform for voice communication in the Airports Specialty (Figure 6, Item 2).
- The Extended Computer Display System Weather Data Element (EXCDS WDE) displays weather information (Figure 6, Item 3).
- The Computerized Video Information Display System (CVIDS) displays information about airports, such as approach plates and emergency procedures (Figure 6, Item 4).
- The NAV CANADA Information Display System (NIDS) displays maps and charts of particular geographical areas (Figure 6, Item 5).
- The Peer Display provides a secondary view of the Common Controller Workstation (Figure 6, Item 6).
1.4.1 Extended Computer Display System
The Vancouver ACC Airports Specialty is equipped with EXCDS. The information provided by EXCDS contributes to a controller’s situational awareness and can assist in predicting conflicts. Footnote 23 EXCDS is also designed to coordinate with other agencies and control positions.
Each aircraft in EXCDS is represented by an electronic FDE that displays information about the aircraft (such as aircraft identification and type, point of departure, route, destination, and altitude). FDEs are displayed in various colours: blue represents a departure, brown represents an arrival, and purple represents an overflight.
FDEs for aircraft arriving at an airport within the KALW sector airspace, including FDEs for aircraft that will transit the airspace, will first populate in the EXCDS display inbox located on the right-hand side of the displayFootnote 24 (Figure 2). The controller must manually post the FDE from the inbox to the appropriate active panel, located to the left of the inbox.
There are 2 methods of posting FDEs from one panel to another: the “pick and touch” and the “pick and drag.” In both cases, the controllers select the FDE they want to move (with their finger or the mouse). In the “pick and touch” method, the controllers touch inside the EXCDS panel where they would like to post the FDE, and in the “pick and drag” method, the controllers drag the FDE to the EXCDS panel where they would like to place it.
Once an FDE is posted into the appropriate active panel, a comparison of its route and altitude to that of other FDEs posted into active panels by the controller can help the controller identify potential conflicts between aircraft before the aircraft enter the sector’s airspace. This can be time consuming, particularly when a number of FDEs need to be compared. It also relies on the controller’s working memory (see section 1.6.1) and accurate assessment of the current and future traffic.
It was not the KALW sector controller’s practice to use EXCDS to predict conflicts between aircraft. Therefore, in this occurrence, the FDEs of the Q400 and the Piaggio were not compared using EXCDS. Instead, the KALW sector controller typically relied on CSiT as the primary method of identifying conflicts between aircraft. EXCDS would remain part of the controller’s scan.
In this occurrence, the Q400 was transiting the KALW sector airspace. The Q400’s FDE was posted from the EXCDS inbox into the YNY (Enderby) active panel, because the airspace around YNY was where the aircraft would first enter the KALW sector airspace. The FDE for the Q400 had been posted in the YNY active panel by the controller whom the KALW sector controller had replaced.
The Piaggio was entering the KALW sector airspace from the south; therefore, the KALW sector controller manually posted the FDE from the EXCDS inbox to the active panel for CYYF (Penticton Airport) because the airspace around CYYF was the airspace from which the aircraft would first enter the KALW sector airspace. Although the FDE was posted in the CYYF active panel, it was coloured purple because Piaggio was transiting the airspace and not landing at CYYF.
EXCDS is also used to coordinate aircraft movements with other agencies and control positions, reducing the requirement to communicate verbally. Control towers and flight service stations located at the airports within the KALW sector airspace are also equipped with EXCDS. For example, when the KALW sector controller posted the FDE for an aircraft arriving at CYKA into the active panel for CYKA, the information would be visible on the EXCDS display located in the flight service stations at CYKA, informing the specialist of the aircraft’s estimated time of arrival at the airport.
1.4.2 Canadian Automated Air Traffic System
The NAV CANADA Vancouver ACC is equipped with a CAATS, a fully redundant system that operates with 2 synchronized flight data processors (FDP). CAATS is also connected to EXCDS. The CAATS FDPs send all flight plan data, and updates to that data, to the EXCDS. For example, when controllers update an aircraft’s flight data on their CSiT, it also updates the same information on the aircraft’s FDE on the EXCDS.

CAATS receives data from various sources to create an aircraft’s flight profile. The CAATS’ FDPs provide an aircraft’s flight plan data, including a flight’s CAATS–assigned transponder code, to the radar data processing system re-host (RDPSR) so it can correlate flight plan data to the radar track of an aircraft. The FDPs and RDPSR continuously compare an aircraft’s flight plan data and radar track. When the flight data and radar track correlate, the aircraft’s target is displayed as a polygon on the controller’s CSiT (Figure 7).
1.4.2.1 Disparity error
A CAATS disparity error occurs when the CAATS FDPs receive an update from the RDPSR indicating that an aircraft radar track in the RDPSR does not correlate with the flight plan data in the CAATS FDPs.
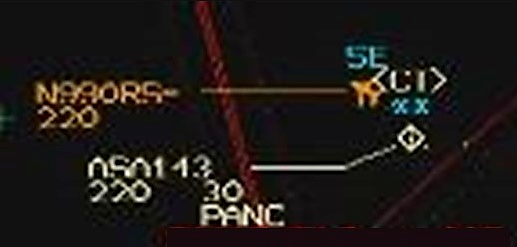
In this occurrence, the CAATS FDPs had transponder code 3565 assigned to the Piaggio, and the aircraft’s transponder was set to the correct code. However, the RDPSR was not correlating the information. The Piaggio’s target on the KALW sector controller’s CSiT was displayed as flight ASA143 with a white diamond (the symbol for an uncorrelated target), and its data tag indicated a CAATS disparity error < CT >. The target for the Piaggio’s expected position, based on the CAATS FDPs flight plan data, was shown as an orange airplane, meaning it was a non-radar target (Figure 8).
Approximately 10 hours before the occurrence, the CAATS FDPs had assigned transponder code 3565 to the ASA143 flight that was en route to PANC. Transponder code 3565 would become available for reassignment within the CAATS FDPs after control responsibility of the ASA143 flight had been transferred from Vancouver ACC to Anchorage Air Route Traffic Control Center (ARTCC). Approximately 10 minutes after control responsibility of the ASA143 flight had been transferred to Anchorage ARTCC, the CAATS FDPs would send a message to delete the ASA143 flight in the RDPSR, and transponder code 3565 would become available for reassignment. This information would also be sent to EXCDS, and the FDE for ASA143 would be deleted if the controller had not already deleted it.
When control responsibility of the ASA143 flight was transferred to the Anchorage ARTCC, the CAATS FDPs were offline so that new software could be installed. They therefore did not send a message to the RDPSR to delete the ASA143 flight in the RDPSR. This resulted in the RDPSR still having the ASA143 flight associated with transponder code 3565, even though control responsibility of the flight had been transferred to Anchorage ARTCC.
Certain software updates to the CAATS FDPs require both processors to be taken offline simultaneously, resulting in all flight plan data in the FDPs being lost when they are restarted.
When both CAATS FDPs are taken offline simultaneously, controllers update an aircraft’s flight plan data on the EXCDS FDEs. As a result, the EXCDS will reflect the correct aircraft flight information when the CAATS FDPs are restarted. When the CAATS FDPs are restarted, the current flight plan data within EXCDS will update the CAATS FDPs with all current flight plans and any changes that were made to those flight plans during the time that the CAATS FDPs were offline.
After the CAATS FDPs are restarted, a synchronization of the CAATS FDPs and the RDPSR is also required by procedure. A data systems coordinator (DSC) will manually purge all the flight plan data in the RDPSR before syncing the FDP and RDPSR to ensure the flight plan data is current and accurate. The purging deletes all current flights in the RDPSR, and the synchronization replaces them with all the flights in the CAATS FDPs.
In this occurrence, the DSC was called away just before he was to complete the purging step. While he was away, another DSC continued the procedure, but did not perform the purging step.
Therefore, when the Piaggio’s flight plan data was later entered into the CAATS FDPs, transponder code 3565 was assigned to the Piaggio because it was available for assignment in the FDPs, even though the ASA143 flight from 10 hours before was associated with transponder code 3565 in the RDPSR.
When the CAATS FDPs compared the Piaggio’s flight data to the RDPSR radar track, the target’s data tag appeared as the ASA143 flight on the controller’s CSiT and it had a CAATS disparity error associated with it, because the information in the CAATS FDPs and RDPSR did not correlate.
Sometimes when an aircraft is entering the KALW sector airspace from the Seattle airspace, there are errors with the aircraft’s transponder code, resulting in the aircraft’s data tag displaying incorrect information. When this occurs, it is usually the result of the aircraft being assigned a different transponder code by the Seattle ARTCC than the code assigned to the flight by the CAATS FDPs. Transponder code errors can also occur if a pilot has entered the wrong transponder code into the aircraft’s transponder. Normally, reassigning the transponder code to the aircraft will correct the error, resulting in a correlated target displayed on the controller’s CSiT. This type of error with an aircraft’s transponder code is usually resolved quickly.
The KALW sector controller assumed that the error with the Piaggio’s tag was a result of one of these 2 situations. He could not understand why the Piaggio remained displayed as flight ASA143 after the Piaggio pilot indicated that the aircraft’s transponder was set to code 3565. He did not notice the CAATS disparity error code < CT > in the aircraft’s data tag and did not consider this to be a possible cause for the transponder code error.
CAATS disparity errors were common approximately 10 years earlier, but have been reduced by the implementation of the procedure requiring that data be purged following a software update. The controller did not recall having received training to resolve this type of error.
1.4.2.2 Medium-term conflict detection
Medium-term conflict detection (MTCD) is a decision support tool in CAATS to assist controllers in detecting conflicts between aircraft.Footnote 25 For MTCD to detect conflicts between aircraft, each aircraft’s flight data and radar track must be correlated, and each aircraft’s flight profile must be accurate.
MTCD has been implemented within the Vancouver ACC Airports Specialty airspace to detect conflicts between aircraft operating at FL 190 and above. In this airspace, MTCD examines conflicts between aircraft when they are within 10 minutes of each other.Footnote 26
In this occurrence, the Piaggio’s flight profile was inaccurate, a result of its flight plan data and radar track not being correlated. The MTCD did not detect a conflict between the Piaggio and the Q400, nor was it designed to do so, even though the Q400’s flight data and radar track were correlated and its flight profile was accurate.
When an aircraft’s transponder code is not correlating correctly, the CAATS flight plan data, including the aircraft’s FDE in EXCDS, will not update automatically. Also, MTCD is unable to detect conflicts between aircraft when the flight data and radar track of at least 1 of the aircraft are not correlated.
The KALW sector controller normally relied on MTCD to identify conflicts and was generally aware of the need for an aircraft’s flight profile to be accurate for MTCD to detect a conflict between aircraft. However, at the time of this occurrence, the controller did not recognize that the MTCD would not provide conflict detection with regards to the Piaggio, and therefore did not apply a secondary method of conflict detection such as a more thorough scan for potential traffic on the CSiT or EXCDS.
1.4.2.3 Conflict alert
Conflict alert has been implemented within the Vancouver ACC Airports Specialty airspace to assess potential conflicts between radar-identified aircraft being tracked by the RDPSR and displayed on the CSiT that are operating at 14 000 feet and above.Footnote 27
Conflict alert will issue a TFC alert to a controller when the RDPSR predicts a conflict between aircraft that are 2 minutes from each other. A TFC alert will include the altitude at which the conflicting traffic is flying. In Figure 9, the “TFC220” alert indicates that a conflict is predicted between the Q400 and the Piaggio, and that they are both flying at FL 220.

If separation is not maintained and the system predicts a conflict between the aircraft, and the aircraft are 1 minute from each other, the TFC alert will change to a CON alert. When a CON alert is displayed, a loss of separation between the 2 aircraft has occurred, as shown in Figure 10.Footnote 28

Both the TFC and the CON have an associated audible alarm as well as the visual alerts provided to a controller on the CSiT.
In this occurrence, the KALW sector controller neither saw the visual alert nor heard the audible alarm; however, another controller working a nearby sector heard the audible alarm.
1.5 Air traffic control procedures for alleviating workload
1.5.1 Assisting colleagues
An air traffic controller “may assist a controller responsible for a position, provided one of the following conditions is met: the responsible controller asks for assistance and specifies the assistance required; [or], [the controller] inform[s] the responsible controller of the assistance [they] will be providing and receive[s] approval.”Footnote 29
Prior to the occurrence, the KALW sector controller was offered assistance by a second controller: the controller he had recently replaced. The second controller, who had observed that the amount of current and anticipated traffic had increased significantly since he had been replaced, offered to assist the KALW sector controller. The KALW sector controller stated that he did not require assistance, but he asked the second controller to resolve the error with the Piaggio’s transponder code.
After troubleshooting the problem with the Piaggio’s transponder code, the second controller requested a new transponder code to be assigned by the CAATS FDPsFootnote 30 to the Piaggio, and shortly afterward informed the KALW sector controller of the new code. Because the KALW sector controller was busy and could not immediately assign the new transponder code to the Piaggio pilot, the second controller waited for the KALW sector controller to assign the code to ensure that assigning the new transponder code would resolve the error.
While waiting to ensure that the error related to the transponder code was rectified, the second controller provided some additional assistance to the KALW sector controller, such as advising him to transfer an aircraft to another sector’s frequency. It was then that the KALW sector controller informed the second controller that he would accept assistance after all.
As the second controller left the KALW sector controller position to retrieve his headset, he passed a controller who was returning from a break and asked her to help by opening the LW sector. The loss of separation occurred as this controller was in the process of opening the LW sector.
1.5.2 Limiting service
At times, controllers may have to limit the number of aircraft in the airspace for which they are responsible to ensure that they can control the aircraft safely and efficiently. This may be accomplished by “instructing aircraft to hold on the ground or in the air [or by] informing an adjacent sector or unit that approval is required before an aircraft can enter [their] area of responsibility.”Footnote 31
Limiting departures from the airports within the KALW sector was rarely initiated.
1.5.3 Shift supervision
According to the Vancouver ACC Unit Operations Manual, “[t]he Specialty Team Supervisor is responsible for the timely opening and closing of control positions and he/she is directly accountable to the Shift Manager for those decisions.”Footnote 32 The manual also states that “[t]he Supervisor should, in anticipation of expected traffic levels, provide manageable traffic levels either by opening additional control positions and/or through coordination with the Shift Manager, implementing appropriate traffic management initiatives.”Footnote 33
Furthermore, one of the responsibilities of the team supervisor is “to initiate and coordinate flow control restrictions with the Shift Manager.”Footnote 34
The only other control position that could have been opened to alleviate the KALW sector controller’s workload was the LW sector. Opening the LW sector may have provided limited relief to the KALW sector controller. When the LW sector is open, aircraft departing IFR from CYLW, CYYF, CYDC, and CYVK would initially be controlled by the LW sector controller. Control responsibility would be transferred to the KA sector controller when the aircraft were climbing and approaching 13 000 feet ASL. Aircraft arriving under IFR at CYLW, CYYF, CYDC, and CYVK would initially be controlled by the KA sector controller. Control responsibility would be transferred to the LW sector controller when the aircraft were descending and approaching 14 000 feet ASL.
Restricting traffic from entering the KA sector airspace and coordinating with the airports within that airspace to hold departures on the ground were traffic management initiatives available to alleviate the KALW sector controller’s workload.
Prior to the occurrence, the team supervisor had left the operations room to verify some information and was not present when the loss of separation occurred.
1.6 Human factors
1.6.1 Situational awareness and working memory
Situational awareness is defined as “the perception of elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future.”Footnote 35
Air traffic controllers must create and maintain a transient, dynamic pictorial representation (mental image) of the airspace under their control. The controller’s environment “is characterized by a continuous sequence of ever-changing, transient information.”Footnote 36 They must continuously process transient information to ensure that aircraft remain separated by the appropriate minima, and then discard the information.
Controllers must first perceive air traffic information using CSiT and EXCDS. They must then establish the relevance of this information to identify conflicts between aircraft and, finally, use this information to project future states and events to ensure the required separation is maintained between aircraft.
Shortcomings may occur at all 3 levels of information processing, particularly when processing resources are limited, workload is high, or distractions break the flow pattern of ongoing activities and result in incomplete or inadequate situation assessments.
1.6.2 Attention and workload
Accurate situational awareness is highly dependent on attention to different aspects of the work environment. A person’s ability to divide their attention is limited, and increased workload can adversely affect their ability to perceive and evaluate information from the environment.
Workload is a function of the number of tasks that must be completed within a given amount of time. If the number of tasks that must be completed increases, or if the time available to complete them decreases, the workload increases. Task saturation occurs when the number of tasks to be completed in a given time exceeds someone’s capacity to perform them, and some tasks must be shed or deferred as a result.
Increased workload can lead to attention narrowing or tunnelling. This means that a person locks in on certain cues or features of the environment they are trying to process, and may thus inadvertently stop scanning the whole environment. In some cases, people may unintentionally focus on the information they believe is most important. In other cases, people may fixate on certain information and forget to reinstate their information scan. Either situation can result in their situational awareness being inaccurate.Footnote 37
Interruptions or distractions can compete with other tasks, increase workload, and divert attention from higher-priority tasks. This lapse of attention may result in omitting to do something, such as detecting possible conflicts, or not correcting the resulting abnormal condition or configuration.Footnote 38
1.6.3 Automation and working memory
If attention is not sustained, information is forgotten from working memory in approximately 15 seconds.Footnote 39 Working memory is particularly impacted when distracting or concurrent events demand attention. Although air traffic controllers have the status of relevant aircraft flight information available on their CSiT and EXCDS, there are occasions when their attention is directed to tasks that are not related to controlling aircraft, such as providing the weather to a pilot or solving technical issues with air traffic service equipment.
Information loss from working memory is also impacted as workload increases. As workload increases in volume and complexity, recalling one’s current plan, such as resolving a possible conflict identified earlier, becomes more challenging.
Cues available for working memory, such as MTCD and EXCDS, assist a controller in processing information by reducing workload and supporting their memory for immediate and future traffic situations.
Although automated systems such as MTCD alleviate resource demands within multitasking environments, they can also change how operators conduct their tasks. When automated systems are reliable, operators may come to rely on the automation and even continue to rely on the systems when they malfunction or are unavailable. Overreliance on automation can lead to decreased vigilance and failures in monitoring tasks.Footnote 40
2.0 Analysis
Air traffic controllers must create and maintain a transient, dynamic mental image of the aircraft under their control. A complete assessment of the airspace for which they are responsible is highly dependent on which information is attended to. This analysis will focus on how the development of the controller’s mental model of the situation, combined with the controller’s workload and work practices, contributed to an inaccurate and incomplete assessment of the situation, which led to the loss of separation. The analysis will also discuss the level of sector supervision at the time of the occurrence.
2.1 Situational awareness
The Canadian Automated Air Traffic System (CAATS) flight data processors (FDPs) had undergone a software update before the occurrence. The data systems coordinator (DSC) did not perform the required purging step that would manually purge all the flight plan data in the radar data processing system re-host (RDPSR) before syncing the FDPs and the RDPSR. As a result, when the Piaggio’s flight data was entered into the CAATS FDPs, the flight was given a transponder code that the FDPs saw as available, but that the RDPSR associated with the earlier flight ASA143. The Piaggio was then assigned transponder code 3565, which resulted in a CAATS disparity error.
The DSC did not manually purge the flight plan data from the RDPSR, which resulted in the CAATS disparity error associated with the Piaggio.
The combined Kamloops (KA) and Kelowna (LW) sector (KALW sector) controller identified the problem with the Piaggio’s transponder code as a transponder code correlation error. Normally, this error arises because of an aircraft having been assigned a different code than the code assigned by the CAATS FDPs or because the pilot has made an error when selecting the aircraft’s transponder code.
When the Piaggio pilot confirmed that his transponder was set to 3565, the controller was confused, as he was expecting a different code. As the KALW controller was unfamiliar with CAATS disparity errors, the controller did not notice the CAATS disparity error code < CT > in the aircraft’s data tag and did not consider this to be a possible cause for the transponder code error.
As a result of the CAATS disparity error, the medium-term conflict detection (MTCD) tool did not alert the KALW sector controller to conflicts involving the Piaggio aircraft.
The KALW sector controller had a vague recollection of CAATS disparity errors occurring several years before and could not recall having received training to resolve them.
If controllers are unfamiliar with air traffic services equipment errors, they may focus their attention on error resolution to the detriment of monitoring and controlling the movement of aircraft, increasing the risk of air traffic conflicts.
The KALW sector controller’s workload was heavy and complex. He was responsible for a large airspace and for the movement and control of numerous aircraft, and at the same time was managing 2 ongoing situations that required his attention. The controller’s attention was split between needing to resolve the transponder code error and controlling the airspace.
The controller did not deviate from his original plan, which was to resolve the error with the Piaggio’s transponder code, provide the Kamloops weather to the pilot, and then start the aircraft’s descent into the Kamloops Airport (CYKA).
Interruptions or distractions can compete with other tasks and divert attention from higher-priority tasks. This lapse of attention may result in the omission of an action such as detecting possible conflicts. The controller fixated on the code error, which impacted his information scan. At the time, the controller diverted his attention to correcting the code error and did not assess the Piaggio’s flight information to identify any potential conflicts with other aircraft within the KALW sector airspace. Also, the CAATS Situation Display (CSiT) was visually cluttered with a high density of flights within the vicinity of the conflicting aircraft, making it difficult to see flight plan details and geographical separations between aircraft. As the workload and complexity increased, the KALW sector controller could not devote the required time to troubleshoot the error with the Piaggio’s transponder code. Eventually, he asked a second controller to help him resolve the error.
The incomplete scan of flight plan information, combined with high workload and a visually cluttered CSiT, resulted in the KALW sector controller developing an incomplete and inaccurate mental representation of the situation. This resulted in the controller being unaware that the trajectories of the Piaggio and the Bombardier DHC-8-402 (Q400) at the same altitude would soon lead to a loss of separation.
2.2 Air traffic control procedures and technology
The information provided by the Extended Computer Display System (EXCDS) contributes to a controller’s situational awareness and is designed to assist controllers in early prediction of potential conflicts. EXCDS is also used to communicate with other control sectors and agencies.
When the KALW sector controller assumed position responsibility for the KALW sector, the Q400 was already on his frequency, and its flight data entry (FDE) was posted in the active panel for YNY (Enderby) on the EXCDS. After the Piaggio’s FDE appeared in the EXCDS inbox, the KALW sector controller posted the FDE from the inbox to the active panel for Penticton Airport (CYYF).
The Q400’s and the Piaggio’s FDEs indicated that both aircraft were operating at flight level (FL) 220 and that their routes would cross to the west of Kelowna International Airport (CYLW). The KALW sector controller did not complete a comparison of the Q400’s and the Piaggio’s routes and altitudes using EXCDS. It was his practice to primarily use EXCDS as a system to communicate with other agencies and sectors, not for early prediction of potential conflicts.
The KALW sector controller in this occurrence would rarely use the EXCDS for early prediction of possible conflicts, likely due to the workload required to accurately assess the current and future flight paths of all aircraft in the sector. This contributed to the controller not identifying the potential conflict between the Piaggio and the Q400.
MTCD is a decision support tool in CAATS to assist controllers in detecting conflicts between aircraft. MTCD has been implemented within the Vancouver Area Control Centre Airports Specialty airspace to detect conflicts between aircraft operating at FL 190 and above. MTCD will detect conflicts between aircraft when they are within 10 minutes of each other.
Automated systems, such as MTCD, alleviate resource demands in multitasking environments; they can also change how operators conduct their tasks. That being said, when automated systems are reliable, operators may come to rely on the automation and even continue to rely on the systems when they malfunction or are unavailable. Overreliance on automation can lead to decreased vigilance and failures in monitoring tasks such as scanning all available information.
Without fixing the transponder code, there was no MTCD available. The KALW sector controller had come to rely on MTCD, which may have affected his information scan even when MTCD was not available. As a result, the controller did not use any other method to identify the conflict between the Piaggio and the Q400.
Within the Airports Specialty airspace, conflict alert assesses for potential conflicts between aircraft being tracked by the RDPSR and displayed on the CSiT that are operating at 14 000 feet and above.
Conflict alert provides both a visual alert on the controller’s CSiT and an audible alarm to the controller when the conflicting aircraft are within certain parameters. It will provide a visual “traffic” (TFC) alert, as well as an associated audible alarm, to a controller when the RDPSR predicts that the conflicting aircraft are 2 minutes from each other.
In this occurrence, at about the same time the TFC alert appeared in both the Q400’s and the Piaggio’s data tags on the KALW sector controller’s CSiT, 2 simultaneous transmissions from unrelated aircraft were made to the controller, and a call came in from the Kelowna tower. Once the call from the Kelowna tower had ended, the controller diverted his attention to the aircraft that had just requested its air traffic control clearance. The controller provided the clearance and communicated with 2 other aircraft.
Although the KALW sector controller was looking at the CSiT, his focus was not on the Q400 and the Piaggio, and the visual TFC alert and associated audio alarm were not sufficiently compelling to attract his attention.
Given the KALW sector controller’s numerous tasks, he missed the visual TFC alert in the Q400’s and the Piaggio’s data tags displayed on the CSiT and the associated audio alarm because they were not sufficiently compelling to attract his attention.
After the KALW sector controller instructed the Piaggio pilot to change the aircraft’s transponder code to 2606, the Piaggio pilot requested the Kamloops weather a second time. The KALW sector controller diverted his attention to a secondary display to the left of the CSiT where the Kamloops weather was displayed. His attention remained focused on the secondary display for the time it took to read the weather to the Piaggio pilot.
While the KALW sector controller’s attention was focused on a secondary display, the TFC alert changed to a conflict (CON) alert in both the Q400’s and the Piaggio’s data tags on the CSiT. The controller did not see the change in alert and did not hear the associated audible alarm.
2.3 Shift supervision
When the controller began working the combined KA and LW position 30 minutes before the loss of separation, the workload was manageable for 1 controller. Over the 30 minutes before the occurrence, the workload continually increased to the point that, by the time of the occurrence, the workload in the Airports Specialty KALW sector was heavy and complex. The KALW sector controller was controlling and coordinating the movement of approximately 18 aircraft, and the EXCDS displayed 13 pending departures at the airports within the KALW sector airspace. In addition, in the 15 minutes before the occurrence, a number of situations were increasing the complexity of the operation.
The team supervisor is responsible for the timely opening and closing of control positions in anticipation of expected traffic levels. The team supervisor ensures that traffic levels are manageable by implementing appropriate traffic management initiatives, if required.
Opening the LW sector earlier would have had a limited effect on reducing the KALW sector controller’s workload, because the LW controller would have been responsible for only 1 arrival.
However, there were other ways to make the level of traffic in the KALW sector airspace manageable, such as restricting traffic from entering the KALW sector airspace or coordinating with the airports in the airspace to hold departing aircraft on the ground. These steps were not taken in this occurrence. Assistance by a second controller to alleviate the KALW sector controller’s workload could also have been coordinated and provided prior to the offer of assistance by the second controller.
Although these options were available to the KALW sector controller, a controller in a high-workload situation involving complex traffic may not be in a position to assess whether the limit of traffic volume that can be safely and efficiently controlled has been reached.
Before the occurrence, the team supervisor had left the operations room for a short time to verify some information and had not returned before the loss of separation occurred.
The team supervisor did not adequately monitor the developing situation and did not observe that the level and complexity of current and anticipated traffic in the KALW sector airspace had increased. As a result, no steps were taken to alleviate the KALW sector controller’s workload.
If team supervisors do not adequately monitor controller workload in complex situations with high traffic levels, workload may exceed controller limits, increasing the risk of adverse consequences, such as a loss of separation.
3.0 Findings
3.1 Findings as to causes and contributing factors
These are conditions, acts or safety deficiencies that were found to have caused or contributed to this occurrence.
- The data systems coordinator did not manually purge the flight plan data from the radar data processing system re-host, which resulted in the Canadian Automated Air Traffic System disparity error associated with the Piaggio.
- As a result of the Canadian Automated Air Traffic System disparity error, the medium-term conflict detection tool did not alert the combined Kamloops and Kelowna sector controller to conflicts involving the Piaggio aircraft.
- The incomplete scan of flight plan information, combined with high workload and a visually cluttered Canadian Automated Air Traffic System Situation Display, resulted in the combined Kamloops and Kelowna sector controller developing an incomplete and inaccurate mental representation of the situation. This resulted in the controller being unaware that the trajectories of the Piaggio and the Bombardier DHC-8-402 (Q400) at the same altitude would soon lead to a loss of separation.
- The combined Kamloops and Kelowna sector controller in this occurrence would rarely use the Extended Computer Display System for early prediction of possible conflicts, likely due to the workload required to accurately assess the current and future flight paths of all aircraft in the sector. This contributed to the controller not identifying the potential conflict between the Piaggio and the Bombardier DHC-8-402 (Q400).
- The combined Kamloops and Kelowna sector controller had come to rely on medium-term conflict detection, which may have affected his information scan even when medium-term conflict detection was not available. As a result, the controller did not use any other method to identify the conflict between the Piaggio and the Bombardier DHC-8-402 (Q400).
- Given the combined Kamloops and Kelowna sector controller’s numerous tasks, he missed the visual traffic alert in the Bombardier DHC-8-402’s (Q400’s) and the Piaggio’s data tags displayed on the Canadian Automated Air Traffic System Situation Display and the associated audio alarm because they were not sufficiently compelling to attract his attention.
- While the combined Kamloops and Kelowna sector controller’s attention was focused on a secondary display, the traffic alert changed to a conflict alert in both the Bombardier DHC-8-402’s (Q400’s) and the Piaggio’s data tags on the Canadian Automated Air Traffic System Situation Display. The controller did not see the change in alert and did not hear the associated audible alarm.
- The team supervisor did not adequately monitor the developing situation and did not observe that the level and complexity of current and anticipated traffic in the combined Kamloops and Kelowna sector airspace had increased. As a result, no steps were taken to alleviate the combined Kamloops and Kelowna sector controller’s workload.
3.2 Findings as to risk
These are conditions, unsafe acts or safety deficiencies that were found not to be a factor in this occurrence but could have adverse consequences in future occurrences.
- If controllers are unfamiliar with air traffic services equipment errors, they may focus their attention on error resolution to the detriment of monitoring and controlling the movement of aircraft, increasing the risk of air traffic conflicts.
- If team supervisors do not adequately monitor controller workload in complex situations with high traffic levels, workload may exceed controller limits, increasing the risk of adverse consequences, such as a loss of separation.
4.0 Safety action
4.1 Safety action taken
NAV CANADA has implemented the following safety actions since the occurrence:
- The checklist to be completed after a Canadian Automated Air Traffic System (CAATS) software update has been redesigned to break down the tasks further, which can assist the person performing the work and/or assist the person responsible to ensure the work has been accomplished. A step was added at the end of the procedure to ensure that the person performs a mandatory “Purge All.” The completed checklist is now signed, scanned, and attached to the work order for record keeping and to verify that the work is complete.
- An Operational Directive was issued to all specialties in the Vancouver Area Control Centre with the following: “It has been determined that for all audible alerts to be salient, the CAATS alert volume shall not be set lower than setting 4. Controllers shall adjust and save all their presets to volume setting 4 or above.”
- An Operational Directive was issued to ensure that the Kamloops and Kelowna sectors are segregated every weekday morning for a period spanning the peak traffic duration and other times as required with foresight. This is a pre‑emptive measure to ensure that traffic levels remain manageable and to reduce the risk of requiring the sectors to be split during high-volume sessions.
- An Operational Directive was issued providing guidance to team supervisors regarding leaving the operational environment. The directive states that another team supervisor or a senior controller must be tasked with the ongoing oversight and monitoring of the specialty workload.
This report concludes the Transportation Safety Board of Canada’s investigation into this occurrence. The Board authorized the release of this report on . It was officially released on