Robinson R44 (hélicoptère), C-FJLH
Lac Valtrie (Québec)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu.
Résumé
Le 10 juillet 2019, un hélicoptère privé Robinson R44 (immatriculation C-FJLH, numéro de série 2044) effectuait un vol de jour selon les règles de vol à vue depuis le lac De La Bidière (Québec) à destination de Sainte-Sophie (Québec) avec 1 pilote et 1 passager à bord. L’aéronef n’est jamais arrivé à destination. Il a été porté disparu le lendemain, à 11 h 58 heure avancée de l’Est au Centre conjoint de coordination des opérations de sauvetage de Trenton (Ontario), qui a débuté les recherches. Aucun signal de la radiobalise de repérage d’urgence n’a été capté.
Les Forces armées canadiennes ont effectué des recherches aériennes avec l’aide de plusieurs aéronefs, incluant ceux de la Sûreté du Québec, de la Garde côtière canadienne, et des organismes bénévoles en sauvetage et recherche aériens du Québec et de l’Ontario. Des recherches terrestres et nautiques ont également été entreprises. L’aéronef a été retrouvé le 25 juillet, soit 14 jours après avoir été porté disparu, dans un secteur boisé près du lac Valtrie (Québec). Les occupants ont été trouvés sans vie. Il n’y a pas eu d’incendie. L’aéronef a été détruit.
1.0 Renseignements de base
1.1 Déroulement du vol
Le 8 juillet 2019, le pilote de l’hélicoptère privé Robinson R44 (immatriculation C-FJLH, numéro de série 2044) a effectué un vol selon les règles de vol à vue (VFR) depuis sa résidence de Sainte-Sophie (Québec) à destination de son camp de pêche du lac De La Bidière (Québec) avec 1 passager à bord. Des amis les ont rejoint en hydravion pour y passer 2 nuits.
Le matin du 10 juillet, vers 10 hNote de bas de page 1, les pilotes ont débuté leurs préparatifs séparément en prévision d’un départ vers midi, en direction de leur destination respective. L’hydravion a décollé le premier vers 12 h 25.
Les conditions météorologiques étaient favorables pour effectuer un vol VFR et les vents de surface étaient nuls au niveau du lac. La station d’information de vol (FSS) de Québec n’a reçu aucune demande d’exposé sur les conditions météorologiques ni aucun plan de vol de la part du pilote de l’hélicoptère. Il est possible que le pilote ait utilisé l’internet, disponible à son camp, pour effectuer sa planification de vol. Même si les membres de sa famille savaient qu’il prévoyait rentrer à Sainte-Sophie le 10 juillet, le pilote n’a mentionné aucune heure d’arrivée et n’a pas désigné une personne responsable du suivi de vol. L’heure de décollage de l’aéronef a été estimée à 12 h 56. Le Centre conjoint de coordination des opérations de sauvetage (JRCC) de Trenton n’a été avisé de la disparition de l’aéronef qu’à 11 h 58 le lendemain, le 11 juillet, soit environ 23 heures après l’heure de l’accident, estimée à 13 h 25. Aucun signal de la radiobalise de repérage d’urgence (ELT) n’a été capté.
Le JRCC a dépêché un avion CC130 Hercules et un hélicoptère CH146 Griffon pour effectuer des recherches aériennes, qui ont été infructueuses. Le 12 juillet, la décision du JRCC de rehausser le niveau de recherche à « majeur » a permis aux Forces armées canadiennes (FAC) d’augmenter leurs ressources aériennes. La Sûreté du Québec (SQ), la Garde côtière canadienne (GCC) ainsi que les organismes bénévoles en sauvetage et recherche aériens du Québec et de l’Ontario ont également participé aux recherches.
Le 21 juillet, après 11 jours de recherches intensives mais infructueuses, le JRCC a cessé ses opérations et a retiré tous les effectifs sous son commandement. La responsabilité des recherches a alors été transférée à la SQ.
Les équipes de recherches de la SQ ont finalement retrouvé l’aéronef le 25 juillet, soit 14 jours après que celui-ci eut été porté disparu, dans un secteur boisé près du lac Valtrie (Québec) (figure 1). Les occupants ont été trouvés sans vie. L’aéronef a été détruit.
![Carte des lieux (Source : Google Earth, avec annotations du BST. Source des données cartographiques : Landsat/Copernicus [grande image] et Maxar Technologies [petite image])](/sites/default/files/fra/rapports-reports/aviation/2019/a19q0109/images/a19q0109-figure-01.jpg)
1.2 Personnes blessées
| Gravité des blessures | Membres d’équipage | Passagers | Personnes ne se trouvant pas à bord de l’aéronef | Total selon la gravité des blessures |
|---|---|---|---|---|
| Mortelles | 1 | 1 | 0 | 2 |
| Graves | 0 | 0 | 0 | 0 |
| Légères | 0 | 0 | 0 | 0 |
| Total des personnes blessées | 1 | 1 | 0 | 2 |
1.3 Dommages à l’aéronef
L’aéronef a été détruit par les forces d’impact. Aucun incendie ne s’est déclaré.
1.4 Autres dommages
Sans objet.
1.5 Renseignements sur le personnel
Les dossiers indiquent que le pilote était titulaire d’une licence de pilote privé – hélicoptère et possédait l’annotation pour voler le R44. Cependant, son certificat médical n’avait pas été renouvelé après sa date d’expiration, ce qui ne lui permettait plus d’exercer les privilèges de ses licences et qualifications tel que prescrit dans le paragraphe 404.03(1) du Règlement de l’aviation canadien (RAC) :
404.03(1) Il est interdit à toute personne d’exercer ou de tenter d’exercer les avantages d’un permis, d’une licence ou d’une qualification, à moins qu’elle ne soit titulaire d’un certificat médical valide de la catégorie propre au permis, licence ou qualification, telle qu’elle est précisée à l’article 404.10.
Rien n’indique que la fatigue ait joué un rôle dans cet événement.
| Licences de pilote | Licence de pilote privé-hélicoptère et avion |
|---|---|
| Date d’expiration du certificat médical (catégorie 3) | 1er octobre 2018 |
| Heures de vol total sur avion* | 839 (approximativement) |
| Heures de vol total sur hélicoptère* | 683 (approximativement) |
| Heures de vol sur type (R44)* | 475 (approximativement) |
* Aucune inscription n’a été faite dans les carnets personnels du pilote après le 9 octobre 2012.
1.6 Renseignements sur l’aéronef
Tableau 3. Renseignements sur l’aéronef
| Constructeur | Robinson Helicopter Company |
|---|---|
| Type et modèle | R44 |
| Année de construction | 2009 |
| Numéro de série | 2044 |
| Date d’émission du certificat de navigabilité | 1er décembre 2009 |
| Total d’heures de vol cellule | Approximativement 770 |
| Type de moteur (nombre) | Avco-Lycoming O-540-F1B5 (1) |
| Type d’hélice ou de rotor (nombre) | Rotor bipale (1) |
| Masse maximale autorisée au décollage | 1088,6 kg |
| Type(s) de carburant recommandé(s) | 100/130, 100 LL |
| Type de carburant utilisé | 100 LL |
L'aéronef a été importé neuf au Canada en décembre 2009 et s’est vu attribuer les marques d’immatriculation C‑FJLH. Utilisé en exploitation privée, il a été acheté en juillet 2015 par la société 9320-2232 Québec Inc., dont le pilote était actionnaire. Les dossiers indiquent que l'aéronef était équipé conformément à la réglementation en vigueur.
L’entretien annuel de l’aéronef était effectué par un organisme de maintenance agréé (OMA). Certains travaux élémentaires Note de bas de page 2, comme des changements d’huile et le remplacement de la batterie, avaient été effectués à l’extérieur des visites de maintenance périodiques à l’OMA sans que les inscriptions au carnet de route ne soit complétées ou signées, contrairement à la réglementation en vigueur Note de bas de page 3.
De plus, l’analyse du carnet de route et des autres dossiers techniques a révélé que les exigences de la consigne de navigabilité (CN) 2014-23-16Note de bas de page 4 concernant les pales du rotor principal n’étaient pas toutes respectées ni consignées, ce qui rendait le décollage en contravention à la réglementation en vigueurNote de bas de page 5 (voir la section 1.6.2 pour plus de détails sur cette CN).
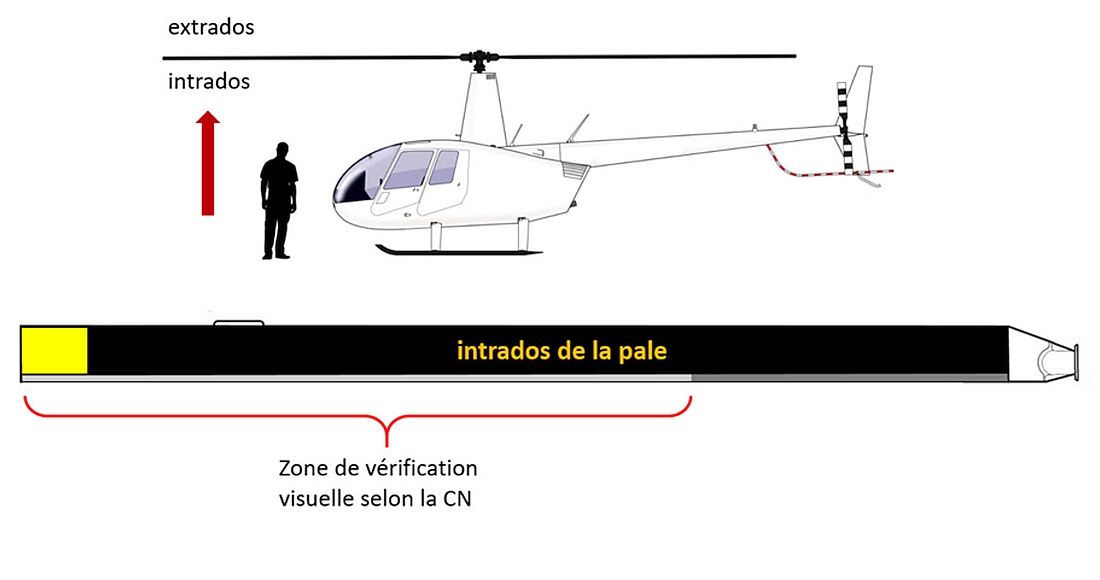
1.6.1 Conception des pales de rotor principal C016-2
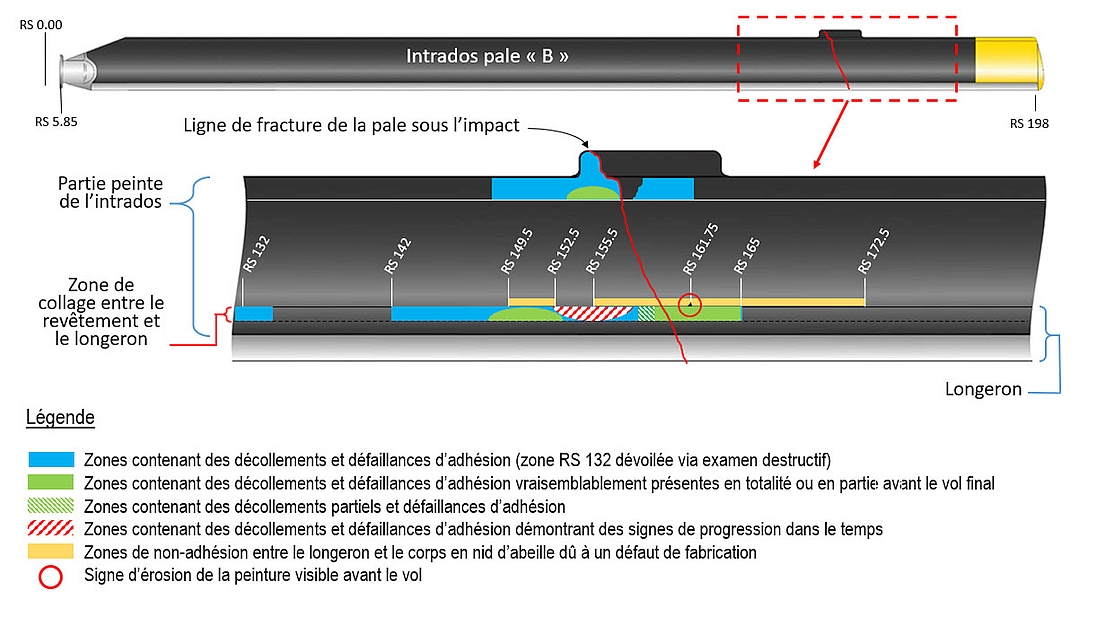
Les pales de rotor principal montées sur C-FJLH au moment de l’accident avaient été fabriquées par la Robinson Helicopter Company (RHC) et portaient le numéro de pièce C016-2. Elles se composaient essentiellement d’un corps en nid d’abeille fabriqué en alliage d’aluminium, bordé à l’avant d’un longeron en acier inoxydable formant le bord d’attaque et à l’arrière d’un renfort de bord de fuite. Un revêtement extérieur en acier inoxydable recouvrait les composants au-dessus (extrados) et en-dessous (intrados) de la pale et était collé à la fois au renfort de bord de fuite, au corps en nid d’abeille et au longeron (figure 2).

Ces pales avaient une propension connue à se décoller au niveau du joint de collage entre le revêtement extérieur et le longeron en bout de pale. Un décollement du revêtement peut se produire lorsque le joint de collage devient exposé en raison de l’érosion de la couche de finition ou lorsque de la corrosion se produit sous le capuchon d’extrémité interne en aluminium. La pale n’est plus considérée en état de navigabilité si un décollement, incluant une micro-perforation, est détecté le long du joint de collageNote de bas de page 6.
En 2008, le National Transportation Safety Board (NTSB) des États-Unis a formulé 5 recommandationsNote de bas de page 7 après avoir relevé 10 cas de décollement au niveau du joint de collage, détectés lors d’inspections ou de visites de maintenance entre juillet 2006 et janvier 2007, ainsi que de 4 cas de décollement survenus en vol en 2006 et 2007. Ces décollements étaient survenus bien avant que les pales en cause ne soient arrivées à la fin de leur durée de vie utile, établie à 2200 heures de vol ou 12 ans, selon la première échéance. Dans son rapport, le NTSB a exprimé ses inquiétudes quant à l’absence de test de durabilité à long terme pour la certification de ces pales et au manque de fiabilité et d’efficacité de la technique d’inspection non destructive des pales recommandée par RHC pour détecter tout problème de décollementNote de bas de page 8.
Tous les cas connus de décollement au niveau des joints de collage touchaient uniquement le bout de la pale et ont entraîné, dans les cas les plus graves, une séparation soudaine par pelage du revêtement de la pale en vol (figure 3).

1.6.1.1 Technique d’encollage
Lors de la fabrication des pales, les revêtements de l’extrados et de l’intrados sont superposés aux joints de collage le long du longeron, du renfort de bord de fuite et du capuchon d’extrémité, et sont maintenus en place avec un adhésif vaporisé. Le corps en nid d’abeille est également fixé à la face arrière du longeron avec de l’adhésif pour assurer la solidité de l’ensemble (figure 4).

Puisqu’il est impossible de connaître la qualité de la cohésion de l’adhésif avant que la pale soit assemblée, le fabricant exposait quelques pales utilisant un même lot de fabrication d’adhésif à de fortes contraintes, jusqu’à la rupture, afin de vérifier le rapport du nombre de ruptures de cohésionNote de bas de page 9 sur le nombre de ruptures d’adhésionNote de bas de page 10, en pourcentage. Les tests devaient produire un résultat d’au moins 80% de ruptures de cohésion, sans quoi le lot d’adhésif et les pales qu’il avait servi à assembler étaient détruits.
Une inspection non destructive des joints de collage était également effectuée sur les parties critiques et non critiques des pales après leur assemblage. Cette inspection, communément appelée tap test, consiste à tapoter doucement le revêtement avec un petit marteau prévu à cet effet ou une pièce de monnaie spécifiqueNote de bas de page 11, puis à écouter le son que cela produit. Un changement de sonorité peut indiquer, entre autres, une défaillance d’adhésion. Le tap test est aussi utilisé lors des inspections de maintenance et, à ce jour, est la seule technique d’inspection non destructive recommandée par la RHC pour détecter une anomalie de liaison.
1.6.2 Consigne de navigabilité
Une CN est une instruction émise par une autorité réglementaire, comme Transports Canada, Aviation civile (TCAC), la Federal Aviation Administration (FAA) aux États-Unis ou l’Agence de l’Union européenne pour la sécurité aérienne (EASA) en Europe, après la découverte d’un problème qui compromet la sécurité du vol et qui nécessite un travail de maintenance obligatoire et/ou une action opérationnelle obligatoire comme mesure corrective et/ou préventive. Au Canada, la réglementation mentionne que l’application d’une CN étrangère, ou tout autre avis équivalent délivré par une autorité de l'aviation civile étrangère qui a compétence sur la définition de type du produit aéronautique, est obligatoireNote de bas de page 12.
Décoller à bord d’un aéronef qui n’est pas conforme aux exigences d’une CN contrevient au RAC. Les mesures prises pour se conformer à une CN doivent être consignées dans les dossiers techniques pertinentsNote de bas de page 13 et, au besoin, être certifiées au moyen d’une certification après maintenanceNote de bas de page 14.
En réponse aux recommandations formulées par le NTSB en 2008, la FAA a émis la CN 2011-12-10, qui est entrée en vigueur le 5 juillet 2011. Cette CN a été remplacée le 9 janvier 2015 par la CN 2014-23-16.
La CN 2014-23-16 exigeait, entre autres, les actions suivantes :
- Avant le premier vol de chaque journée, une vérification visuelle du joint entre le revêtement et le longeron du côté de l’intrados devait être effectuée sur chaque pale pour y déceler toute mise à nue de la surface métallique au niveau du joint (figure 5). La vérification pouvait être effectuée par une personne détenant au moins une licence de pilote privé et devait être inscrite dans les registres de l’aéronef.
- Si la surface métallique au joint était visible, une inspection par un technicien d’entretien d’aéronef (technicien) devait être effectuée en conformité avec le bulletin de service SB72 émis par la RHC, avant tout vol.
- Indépendamment de leur état, toutes les pales devaient être mises hors service et remplacées par des pales portant un numéro de pièce différent, selon le modèle d’hélicoptère, au plus tard le 9 janvier 2020.
Suite aux recommandations du NTSB, le 30 avril 2010, la RHC a émis le bulletin de service SB72. Ce bulletin indiquait, entre autres, que les pales devaient être vérifiées par un technicien à un intervalle ne dépassant pas les 100 heures de service de vol ou à chaque inspection annuelle, selon la première éventualité. Le SB72 a fait l’objet d’une révision (révision A) le 19 juillet 2012. Cette révision réduisait l’intervalle entre chaque vérification à une période de 4 mois. Il est à noter que le SB72 ainsi que sa révision A indiquent que le tap test est la technique à utiliser pour l’inspection des pales.
Lorsqu’un bulletin de service est émis par un fabricant étranger tel que RHC, au Canada, si ce bulletin est incorporé par référence dans une CN applicable à l’aéronef en question, il devient obligatoire de s’y conformerNote de bas de page 15.
Dans l’événement à l’étude, le SB72 était incorporé par référence dans la CN 2014-23-16, rendant son application obligatoire. Par contre, la révision A du SB72 étant citée dans la CN comme moyen optionnel de se conformer au SB72, il n’y avait pas d’obligation de s’y conformer et de faire vérifier les pales par un technicien tous les 4 mois.
L’examen du carnet de route a révélé que l’exécution de la CN 2014-23-16 y avait été inscrite seulement lors des 4 inspections annuelles effectuées depuis l’acquisition de l’aéronef en 2015. La plus récente inspection datait du 3 avril 2019, et ne rapportait aucune anomalie. Entre le 3 avril et le 4 juillet, date de la dernière inscription au carnet de route, 19,6 heures ont été inscrites et aucune anomalie n’a été consignée. Les informations recueillies au cours de l’enquête indiquent que le pilote connaissait l’existence de la CN et ses exigences, mais rien n’indique qu’une vérification visuelle des pales était exécutée avant le premier vol de chaque journée.
1.7 Renseignements météorologiques
La station météorologique la plus proche du lieu de l’accident était celle de Saint-Michel-des-Saints (Québec). Située à environ 40 km au nord-nord-est, elle indiquait les conditions suivantes à 13 h :
- température de 28 °C;
- point de rosée de 15 °C;
- vents du 120° vrai (V) à 2 nœuds.
La prévision de zone graphique « Nuages et temps », émise à 7 h 31 et valide entre 8 h et 14 h le 10 juillet, annonçait des nuages épars dont la base était prévue à 8000 pieds au-dessus du niveau de la mer et une visibilité supérieure à 6 milles terrestres.
Rien n’indique que les conditions météorologiques aient été un facteur dans l’événement à l’étude.
1.8 Aides à la navigation
Le pilote disposait d’un système de positionnement mondial (GPS) portatif (Garmin Aera 796) fixé au tableau de bord à l’aide d’un support et s’en servait comme aide à la navigation. Le GPS portatif a été récupéré et analysé par les spécialistes du Laboratoire d’ingénierie du BST. La mémoire interne du GPS ne contenait aucune donnée sur le vol à l’étude car la fonction d’enregistrement du trajet n’était pas activée.
1.9 Communications
Aucun message de détresse ou autre en provenance de C-FJLH n’a été entendu et rapporté.
1.10 Renseignements sur l’aérodrome
Sans objet.
1.11 Enregistreurs de bord
L’aéronef n’était équipé ni d’un enregistreur de données de vol (FDR), ni d’un enregistreur de conversations de poste de pilotage (CVR), et la réglementation en vigueur n’exigeait ni l’un, ni l’autre.
1.12 Renseignements sur l’épave et sur l’impact
1.12.1 Généralités
L’aéronef a été retrouvé en position verticale sur une saillie rocheuse dans une zone densément boisée (figure 6). Le train d’atterrissage, le toit de la cabine ainsi que le plancher à l’avant de la cabine s’étaient affaissés. Le pare-brise avait éclaté et les portes arrière et celle du côté pilote avaient été éjectées, laissant seule la porte avant du côté passager fixée à son cadre. Les dossiers des sièges avant étaient affaissés vers l’arrière et les assises des sièges étaient enfoncées. La ceinture de sécurité du siège du passager avant, qui comprenait une ceinture sous-abdominale et une ceinture-baudrier, a été retrouvée détachée. Du carburant a été retrouvé dans les 2 réservoirs.

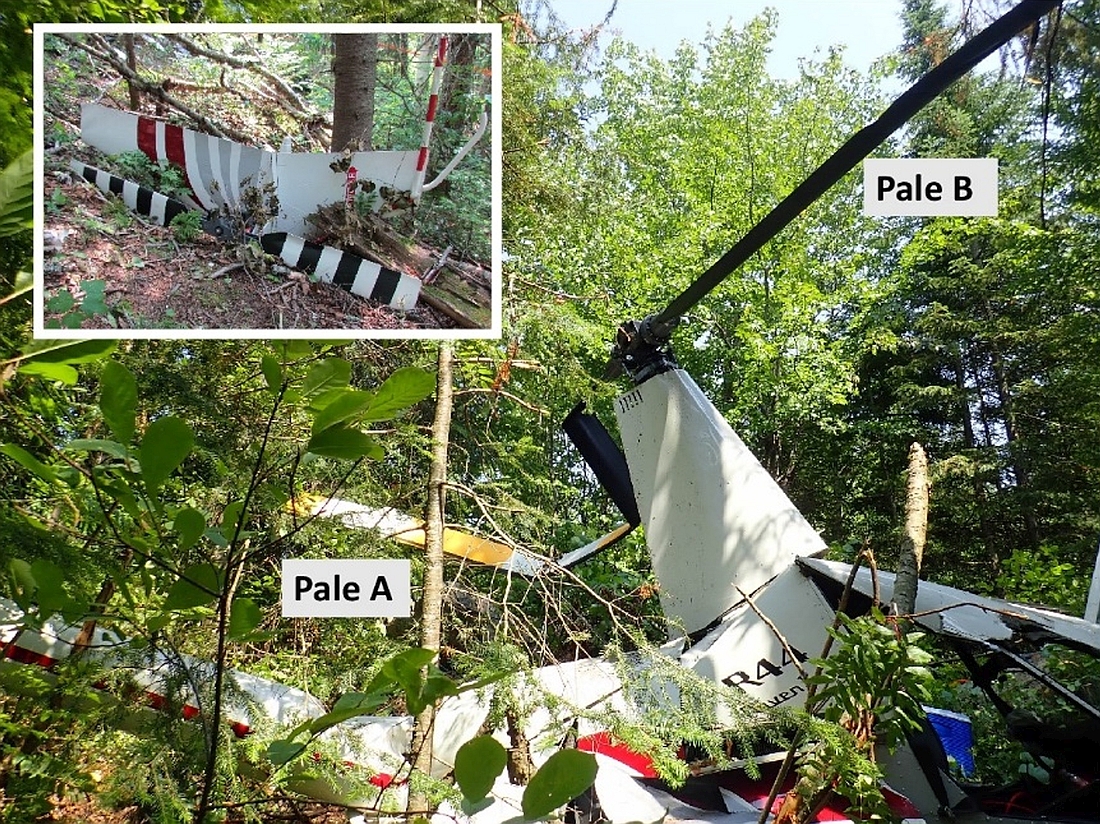
Le mât du rotor principal et la tête du rotor étaient toujours attachés à la boîte d’engrenages principale. Les courroies d’entraînement du rotor principal étaient en bon état et le mécanisme de tension des courroies était en position tendue. Les pales du rotor principal ne présentaient pas les dommages typiques d’un impact alors qu’elles sont en rotation. Une des pales (pale A) était pliée à plusieurs endroits tandis que l’autre (pale B) était droite mais fracturée à son extrémité (figure 7).
La poutre de queue, quoiqu’endommagée, était encore rattachée au fuselage et l’arbre de transmission était toujours rattaché à la poulie supérieure du système d’entraînement. Le rotor de queue ainsi que les stabilisateurs horizontal et vertical étaient séparés de la poutre de queue et ont été retrouvés à environ 6 mètres de l’épave au pied d’un arbre. Les pales du rotor de queue ne présentaient aucun dommage important.
Des morceaux de branches de petit diamètre couvraient l’épave et ses alentours immédiat lorsque les premiers répondants sont arrivés sur les lieux. Le corps du pilote se trouvait à l’intérieur de l’aéronef dans son siège avec sa ceinture de sécurité attachée, tandis que le corps du passager a été trouvé environ 66 mètres plus loin. Tous les débris de l’aéronef étaient dispersés autour de l’épave sur une courte distance. Les enquêteurs du BST n’ont relevé aucune trace au sol ou autre indice pouvant indiquer une quelconque vitesse longitudinale ou latérale au moment de l’impact. Seule la cime des arbres dans le secteur situé au-dessus de l’épave présentait des signes d’impact.
L’épave a été transportée au Laboratoire d’ingénierie du BST pour y subir un examen approfondi.
1.12.2 Examen de l’épave
Le carburant retrouvé dans les réservoirs était de l’AVGAS 100LL non contaminé. La boucle de la ceinture de sécurité du côté passager avant était fonctionnelle et ne présentait pas de dommage majeur. L’examen des dommages causés à l’aéronef, mis en relation avec le poids du passager, a permis d’estimer la force de décélération subie par celui-ci à entre 17 G et 36 GNote de bas de page 16. Par contre, la force de décélération subie par le pilote n’a pu être estimée; cependant, en raison de son poids supérieur à celui du passager, elle aurait été beaucoup plus élevée, lui laissant peu de chance de survie.
Le moteur ne présentait pas les signes typiques qu’il tournait au moment de l’impact. Suite à un examen plus approfondi, aucune preuve d'anomalies mécaniques ou de dysfonctionnement avant l'impact n'a été observée avec le moteur.
1.12.3 Dommages aux pales du rotor principal
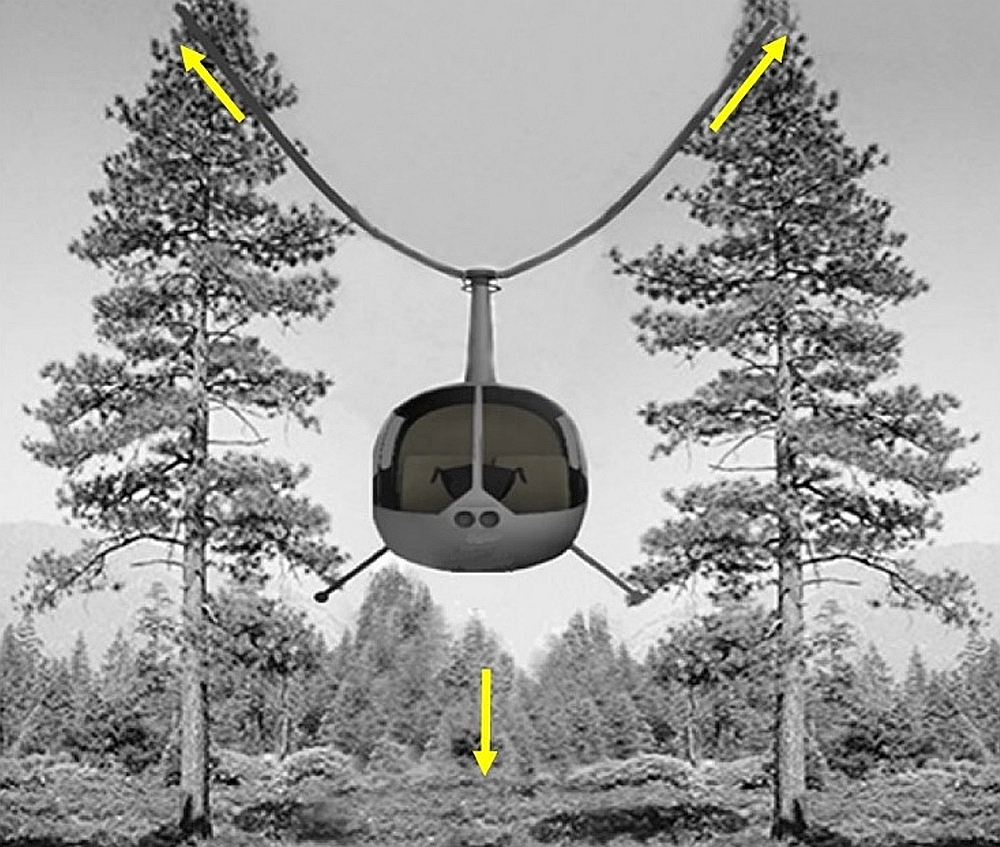
Si un hélicoptère descend au travers des arbres alors que le rotor principal ne tourne pas, il est probable que les pales subiront une flexion excessive vers le haut en raison de la pression exercée par les branches. Cette flexion excessive provoque des déformations par compression du revêtement de l’extrados seulement, c’est-à-dire le côté supérieur de la pale. Le revêtement de l’intrados devrait quant à lui, présenter des éraflures, des entailles ou des enfoncements suite au contact avec les branches (figure 8).
L’examen initial des pales a permis de trouver des déformations aux revêtements de l’extrados et de l’intrados, des lignes de fracture complètes et partielles ainsi que des signes d’impact avec des branches d’arbre sur l’intrados. Les bords d’attaque des longerons ne présentaient pas les dommages typiques d’une pale qui était en rotation au moment du contact avec les arbres.
1.12.3.1 Examen de la pale A
Les multiples déformations transversales du revêtement des 2 côtés de la pale suggèrent que le revêtement a subi une compression à plusieurs reprises en vol. Ces déformations sont compatibles avec des dommages créés par des mouvements excessifs de flexion vers le haut et vers le bas de la pale entière. Un tel mouvement de battement survient généralement lorsque la force centrifuge, qui permet de maintenir les pales à plat, est réduite à cause d’une réduction de la vitesse de rotation des pales.
Aucun signe de perforation ou d’enfoncement du revêtement de l’intrados n’a été trouvé, ce qui indique qu’il n’y a pas eu d’interaction majeure entre la pale et les branches lors de la descente.
1.12.3.2 Examen de la pale B
La pale était brisée à environ 38 pouces de son extrémité (station RS161) et présentait plusieurs lignes de fracture ainsi que de multiples déformations des revêtements de l’intrados et de l’extrados compatibles avec des mouvements excessifs de flexion vers le haut et le bas et de torsion. L’examen indique que les déformations causées par une torsion excessive sont probablement survenues avant celles causées par une flexion excessive.
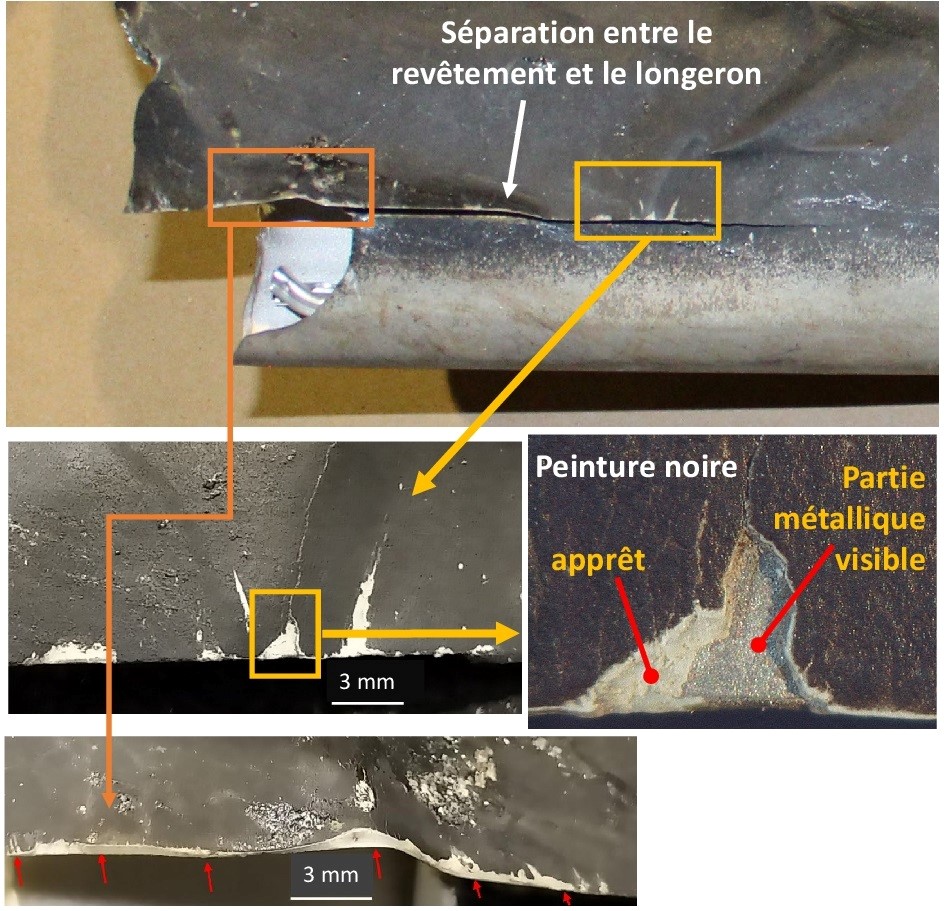
Une observation visuelle attentive a permis de constater que la surface métallique du joint était visible à quelques endroits le long du longeron près de la station RS161. De plus, des signes de décollement et d’écarts du revêtement ont également été noté au joint de collage du longeron. Même si le revêtement de l’intrados s’était décollé du longeron des suites de la fracture, le grossissement de ces parties démontrent que l’érosion de la peinture et de sa sous-couche par l’air a progressé au fil du temps et n’était pas le résultat d’une peinture qui s’est effritée soudainement lors de la séparation du revêtement au joint de collage du longeron (figure 9). Il est probable que les surfaces métalliques à ces endroits auraient été visibles et détectables avant le décollage du vol en question dans des conditions d’observation optimales permettant de repérer de tels détails. L’inspection visuelle pré-vol devrait être effectuée sous un éclairage adéquat et à une distance permettant de distinguer les signes de décollement, ce qui peut nécessiter l’utilisation d’équipement tel qu’un escabeau ou une lampe de poche.
La présence de traces d’impact et de sève sur le revêtement de l’intrados indique que la pale est entrée en contact avec des branches de petit diamètre lors de la descente au travers des arbres. De plus, l’examen des marques laissées par ces contacts a aussi révélé que les déformations causées par les mouvements de torsion et de flexion se sont produites avant que la pale n’entre en contact avec les branches, c’est-à-dire durant le vol.
Il a été établi que les mouvements de torsion se sont développés de façon progressive, ce qui aurait engendré des vibrations en vol dont l’intensité aurait progressé jusqu’à devenir sévères. Ces mouvements de torsion, s’ils apparaissent en vol, peuvent altérer de façon significative les performances aérodynamiques de la pale et la manœuvrabilité de l’aéronef.
1.12.3.3 Défaillance d’adhésion aux joints de collage
Afin de confirmer les décollements du revêtement observés, un examen destructif de la pale a été effectué. La séparation d’échantillons des revêtements supérieur et inférieur a permis de confirmer la présence de plusieurs défaillances d’adhésion de grandeur variable entre les stations RS132 et RS165 (figure 10).
L’examen a révélé qu’à certains endroits, des décollements du revêtement extérieur ont permis à l’humidité de s’infiltrer sous le revêtement et de dégrader l’adhésion au joint de collage avec le temps.
En plus des défaillances d’adhésion, l’adhésif présent sur la surface à plusieurs endroits entre le corps en nid d’abeille et la face arrière du longeron ne présentait pas les empreintes habituelles témoignant d’un contact entre les deux, et ce, sur une longueur cumulative de 20 pouces (zone en jaune). Ceci indique que cette condition était présente depuis l’assemblage de la pale et est le résultat d’un défaut de fabrication.
1.13 Renseignements médicaux et pathologiques
Rien n’indique que la performance du pilote ait été affectée par des facteurs médicaux, pathologiques ou physiologiques.
1.14 Incendie
Aucun incendie ne s’est déclaré après l’impact.
1.15 Questions relatives à la survie des occupants
Le dépôt d’un plan de vol est une méthode fiable et efficace pour garantir le signalement d’un aéronef en retard. De plus, la réglementation en vigueur au moment de l’événement obligeait tout pilote à déposer soit un plan de vol, soit un itinéraire de volNote de bas de page 17, ce qui n’avait pas été fait dans ce cas-ci.
Il est important pour la survie des occupants que les équipes de recherche et sauvetage soient avisées rapidement de tout retard. Après un accident, l’espérance de vie d’un survivant blessé peut diminuer de jusqu’à 80 % au cours des 24 premières heures, tandis que celle d’un survivant non blessé peut diminuer rapidement après les 3 premiers joursNote de bas de page 18. Dans l’événement à l’étude, le signalement de la disparition s’est effectué environ 23 heures après l’heure estimée de l’accident.
1.15.1 Radiobalise de repérage d’urgence
L’aéronef était muni d’une radiobalise de repérage d’urgence (ELT) de marque Kannad de modèle 406 AF-compact qui transmettait sur les fréquences 121,5 MHz et 406 MHz. Le support de l’ELT était fixé dans le compartiment où se situait la boîte d’engrenages principale.
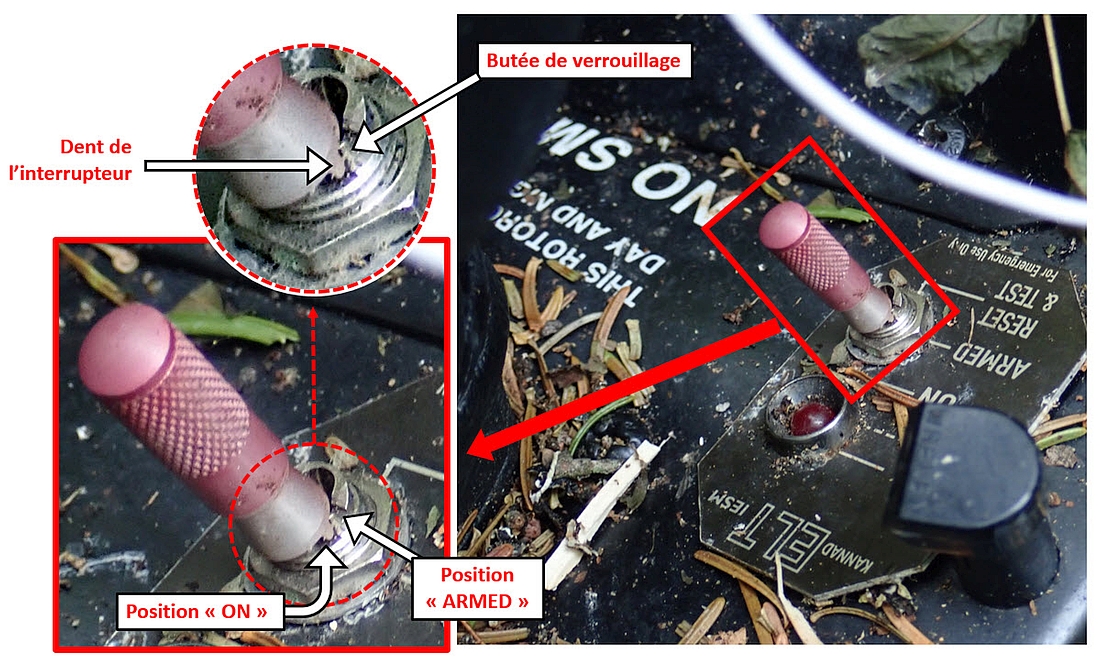
L’ELT est munie d’un interrupteur à 3 positions : OFF (au centre), à laquelle l’ELT est complètement éteinte; ARM (à gauche) à laquelle l’ELT est sous tension, prête à se déclencher en cas d’impact; et ON (à droite), qui permet de déclencher manuellement l’ELT et de transmettre directement le signal de détresse (figure 11).

L’ELT n’était pas accessible de l’intérieur de la cabine, mais pouvait être déclenchée par l’interrupteur du panneau de contrôle à distance situé entre les sièges du pilote et du passager avant. Les 3 positions de cet interrupteur sont ON, ARMED et RESET/TEST. L’interrupteur ne peut pas être maintenu à la position RESET/TEST et, une fois relâché, revient automatiquement à la position ARMED. Tout comme l’interrupteur de l’ELT, il est muni d’un système de verrouillage qui prévient tout déplacement intempestif de la position ARMED à la position ON. Il est à noter que l’interrupteur à distance n’aura aucun effet sur l’ELT si l’interrupteur de l’ELT est à la position OFF et que le panneau de contrôle à distance ne permet pas de connaître la position de l’interrupteur de l’ELT.
L’examen initial de l’épave sur le site de l’accident a révélé que l’ELT ne semblait pas être endommagée. Même si elle n’était plus sur son support en raison de la défaillance de la sangle de fixation, l’ELT était toujours rattachée à l’antenne par son câble. L’antenne et le câble ne présentaient pas de signes apparents de dommages importants. L’interrupteur de l’ELT a été trouvé à la position OFF et celui du panneau de contrôle à distance a été trouvé à la position ON (figure 12).
L’ELT et ses composants ont été acheminés au Laboratoire d’ingénierie du BST où des essais ont révélé qu’elle était en état de marche, qu’elle était conforme aux paramètres techniques spécifiés par le fabricant, que sa batterie était à pleine capacité, que l’antenne était en bon état et qu’un signal de détresse aurait été transmis par suite de l’impact si l’interrupteur avait été à la position ARM.
L’examen de l’interrupteur du panneau de contrôle à distance indique qu’il était fonctionnel et que son système de verrouillage ne présentait aucune défaillance. Il est donc peu probable que cet interrupteur ait été déplacé à la position ON par un objet non sécurisé à l’intérieur de la cabine au moment de l’impact.
De plus, le fil électrique qui reliait le panneau de contrôle à distance à l’ELT a été sectionné par le coin inférieur gauche du réservoir de carburant auxiliaire, qui s’était affaissé au moment de l’impact.
1.15.1.1 Système de verrouillage de l’interrupteur de la radiobalise de repérage d’urgence
Une ELT qui possède un interrupteur avec une position OFF doit être muni d’un système de verrouillage pour empêcher celui-ci de basculer de façon intempestive à la position OFF lors d’un impact.
Le système de verrouillage du modèle d’ELT à l’étude est conçu de manière à ce qu’une dent alignée avec le centre de l’interrupteur soit bloquée par une butée de chaque côté pour l’empêcher de basculer d’une position à une autre. Pour déplacer l’interrupteur, il faut d’abord le tirer pour dégager la dent des butées et le basculer à la position désirée (figure 13).
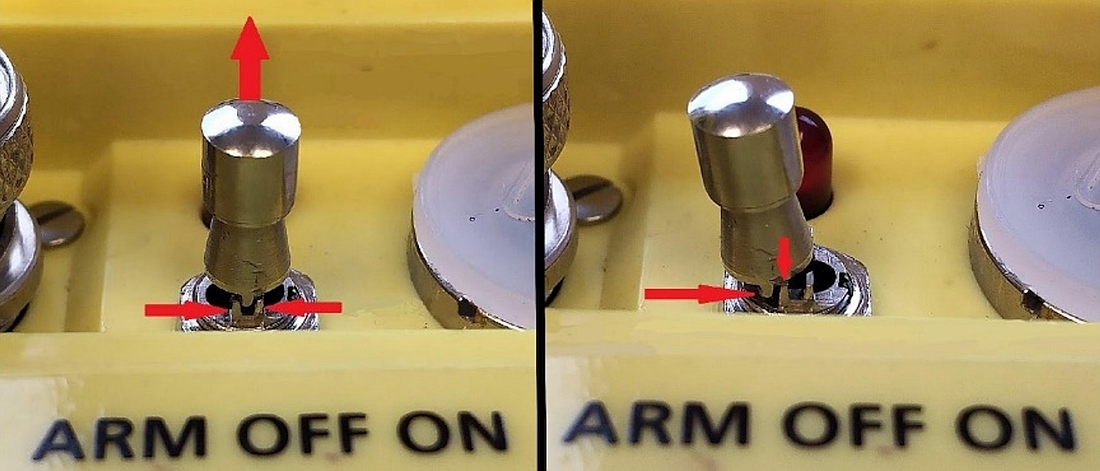
Un examen plus approfondi de l’ELT en cause a révélé que les butées de verrouillage entre la position OFF et la position ARM étaient brisées (figures 14 et 15). De plus, l’examen a permis de constater que la surface de rupture de ces butées était lisse, ce qui indique que l’interrupteur avait basculé à de multiples reprises entre la position OFF et la position ARM au fil du temps.


Des tests d’impact avec l’ELT ont été effectués et ont révélé que l’interrupteur pouvait basculer à la position OFF sous une force d’impact minimale de 1,8 G. L’enquête n’a pas permis de déterminer si l’interrupteur se trouvait à la position OFF avant l’impact ou s’il a basculé dans cette position suite à l’impact.
1.15.1.2 Inspection périodique des radiobalises de repérage d’urgence
Le fabricant des ELT de marque Kannad, Orolia, indique dans son manuel d’utilisation que l’ELT doit être soumise régulièrement à une vérification opérationnelle (auto-test) par un pilote ou un technicien pour détecter tout problème. De plus, il recommande que l’auto-test soit effectué une fois par mois mais pas plus d’une fois par semaine, car ce test peut affaiblir la batterie s’il est effectué trop souventNote de bas de page 19. Rien n’indiquait dans le carnet de route de l’aéronef que des auto-tests avaient été effectués en dehors des inspections annuelles de maintenance. Il est à noter que le RAC considère l’exigence du fabricant d’effectuer un auto-test comme une recommandation et non comme une obligation au Canada.
Par ailleurs, une maintenance des ELT effectuée par un technicien était exigée par Transports Canada (TC) mais pas par le fabricant. Ce dernier avait néanmoins émis la lettre de service SL S1840501-25-05Note de bas de page 20 Guidelines for periodic inspection comme guide de référence pour la maintenance de certaines de ses ELT, dont celle à l’étude. L’intervalle de maintenance applicable dans ce cas-ci ne devait pas dépasser 12 mois selon la normeNote de bas de page 21 en vigueur au moment de l’accident. De plus, la norme 571, appendice G, du RAC détaillait ce qui devait être inspecté.
Le carnet de route de l’aéronef indiquait qu’une recertification de l’ELT avait été complétée le 3 avril 2019 selon la norme 571, appendice G du RAC et la lettre de service SL S1840501-25-05 du fabricant. Les étapes détaillées dans ces documents n’avaient pas permis de détecter le bris du système de verrouillage de l’interrupteur. Une fois l’ELT recertifiée, elle a été renvoyée à l’OMA chargé de la réinstaller sur son support dans l’hélicoptère. La sangle de fixation sur le support de l’ELT présentait des signes d’usure avancée et aurait dû être remplacée selon les recommandations du fabricant de l’ELT. L’OMA a effectué un auto-test en se servant de l’interrupteur sur le panneau de contrôle à distance suite à la réinstallation de l’ELT sur son support et a confirmé qu’elle fonctionnait.
1.15.2 Organisation des recherches
Au Canada, la recherche et le sauvetage constituent une responsabilité partagée entre les FAC et la GCC. La zone de responsabilité des opérations de recherche et de sauvetage est divisée en 3 régions : Victoria, Trenton et Halifax.
Dans l’événement à l’étude, le JRCC de Trenton était responsable de coordonner les recherches jusqu’au 21 juillet 2019, date à laquelle il a mis fin à ses opérations. À ce moment-là, la responsabilité de la recherche et du sauvetage a été transférée à la SQ.
1.15.2.1 Effectifs
Les opérations de recherche ont débuté le 11 juillet. Le 12 juillet en après-midi, soit un peu plus de 24 heures après le début des recherches, le niveau des opérations a été rehaussé à « majeur ». Cette revalorisation a permis au JRCC d’augmenter les effectifs matériel et humain (tableaux 4 et 5) et de créer une unité indépendante du centre de contrôle pour s’occuper exclusivement de cet événement.
| Organisme de recherche | Type d’aéronef (nombre) |
|---|---|
| Forces armées canadiennes | Avion (3), hélicoptère (4) |
| CASARA*/SERABEC** | Avion (9) |
| Garde côtière canadienne | Hélicoptère (1) |
| Sûreté du Québec | Hélicoptère (1) |
| Total*** | Avion (12), hélicoptère (6) |
* La « Civil Air Search and Rescue Association » de l’Ontario est un organisme national bénévole financé par le ministère de la Défense nationale pour aider l’Aviation Royale Canadienne dans son mandat de fournir des services de recherche et de sauvetage aériens au Canada. (Source : http://www.casaraottawa.org/)
** Sauvetage et recherche aériens du Québec regroupe des bénévoles qui se consacrent à la promotion de la sécurité aérienne et fournit le support aérien au programme national de recherche et sauvetage du Canada. (Source : https://www.serabec.ca/a-propos)
*** 447,5 heures de vol ont été effectuées, en excluant celles effectuées par la GCC et la SQ.
| Ressources humaines | Nombre de personnes | Total d’heures effectuées |
|---|---|---|
| Observateurs | 44 | 347 |
| Autres* | Approximativement 77 | Non disponible |
* Incluant le personnel d’administration, de logistique et de relation avec les médias.
Les recherches ont été coordonnées à partir des installations secondaires du JRCC situées à Belleville (Ontario) et les opérations aériennes ont été gérées depuis le centre de commandement de la force opérationnelle aérienne établie temporairement à Mirabel (Québec).
En outre, plusieurs propriétaires d’aéronefsNote de bas de page 22 ainsi que des personnes désirant aider ont participé aux efforts de recherche et leur dévouement mérite d’être mentionné. Cependant, ces bénévoles ne pouvaient pas être intégrés aux équipes de recherches aériennes officielles et n’avaient pas l’autorisation de survoler les zones de recherche délimitées par le JRCC pour des raisons de sécurité. Les FAC ont néanmoins établi et maintenu la communication avec ces bénévoles afin de les informer quotidiennement des zones réservées pour les opérations officielles, ce qui leur permettait de participer en survolant d’autres secteurs sans entrer en conflit avec les aéronefs sous la responsabilité du JRCC.
1.15.2.2 Outils de recherche
En cas d’accident d’aéronef, le moyen le plus rapide d’aviser les équipes de recherche et sauvetage de l’événement est l’émission d’un signal de détresse par une ELT sur la fréquence 406 MHzNote de bas de page 23 et sa réception par le Centre canadien de contrôle des missions (CCCM).
En l’absence de signal de détresse, un plan de vol déposé verbalement ou en ligne auprès d’une FSS permet de déclencher automatiquement les recherches 1 heure après l’heure d’arrivée prévue de l’aéronef à moins d’indication contraire de la part du pilote, si celui-ci ne ferme pas son plan de vol. Alternativement, un itinéraire de vol déposé auprès d’une personne de confianceNote de bas de page 24 permet aussi de déclencher les recherches avec un minimum de délai après l’heure d’arrivée prévue. De plus, le plan de vol et l’itinéraire de vol fournissent des informations utiles pour les recherches, par exemple la route de vol planifiée, la quantité de carburant embarquée et le nombre de personnes à bord. Ces informations sont importantes car elles permettent aux équipes de recherche et sauvetage de concentrer leurs efforts le long de la route de vol prévue et ainsi réduire au minimum le temps nécessaire pour retrouver l’aéronef et ses occupants.
En l’absence de signal de détresse et de plan de vol ou d’itinéraire de vol, les recherches risquent de ne pas être déclenchées dans un délai raisonnable, ce qui réduit grandement les chances de survie des occupants. De plus, le manque d’information sur le trajet de vol emprunté par l’aéronef porté disparu agrandira la zone des recherches et le temps nécessaire pour le retrouver tout en réduisant les chances de survie des occupants.
Dans l’événement à l’étude, l’incertitude concernant l’heure de départ, la route de vol planifiée et la quantité d’essence restante à bord a engendré plusieurs hypothèses quant aux secteurs où aurait pu se trouver l’aéronef au moment de l’accident. Ceci a eu pour effet d’élargir la zone de recherche initiale.
Un cas similaire impliquant un hélicoptère de type Robinson 66 est survenu le 4 mars 2019Note de bas de page 25. Sa disparition a été signalée aux autorités plus de 30 heures après l’accident. L’absence de plan de vol ou d’itinéraire de vol, et une ELT dont l’interrupteur a également été trouvé à la position OFF, n’ont pas permis de déclencher les recherches dans un délai raisonnable ni de localiser l’aéronef rapidement. L’aéronef a été retrouvé le 11 mars, soit 7 jours après l’accident, et il n’y a pas eu de survivant.
Dans ce genre de situation où il y a peu d’information sur le vol, le JRCC doit utiliser toutes les sources d’informations susceptibles d’aider à réduire l’étendue et la durée des recherches. Cette collecte d’information demande du temps et des effectifs, sans garantie que les informations reçues permettront de retrouver rapidement l’aéronef porté disparu.
Dans l’événement à l’étude, plusieurs sources d’information ont été analysées, notamment :
- l’imagerie satellite;
- les données provenant de radars civils et militaires;
- les communications radio;
- l’historique de l’aéronef et les habitudes de vol du pilote;
- les données provenant des équipements de surveillance et de détection à bord du CP140 Aurora;
- les résultats du détecteur de signaux cellulaires portatifNote de bas de page 26;
- les données historiques des téléphones cellulaires des occupants.
Seules l’analyse des données historiques des téléphones cellulaires des occupants et l’utilisation de ces données pour la triangulation ont permis de réduire la zone des recherches et de localiser l’aéronef.
1.15.2.3 Réseau de téléphonie cellulaire
Le réseau de téléphonie cellulaire se compose principalement d’antennes et de centraux qui relaient les appels de façon automatique. Lorsqu’une personne utilise son téléphone cellulaire pour appeler ou pour envoyer un message texte, l’antenne la plus proche capte l’émission du téléphone cellulaire et l’envoie à un central. Le central retrace le téléphone du destinataire avec son numéro et transmet l’appel soit via l’antenne la plus près s’il s’agit d’un téléphone cellulaire, soit via une ligne téléphonique terrestre s’il s’agit d’un téléphone fixe.
La couverture du réseau dépend du nombre et de l’emplacement des antennes qui le constituent. Dans les zones urbaines où la population est dense, on trouve beaucoup d’antennes installées en haut des bâtiments. Comme elles sont nombreuses et proches les unes des autres, elles sont de faible puissance. Dans les zones peu peuplées, il y a beaucoup moins d’antennes ce qui implique qu’elles doivent être installées sur des tours hautes et doivent être plus puissantes pour avoir une plus grande portée.
Une personne qui utilise son téléphone cellulaire tout en se déplaçant ne perd pas la communication, car le central détecte le déplacement au fur et à mesure que le signal du téléphone cellulaire se connecte aux différentes antennes le long du trajet. Si l’appel téléphonique ou les échanges de messages textes cessent, le central cesse d’enregistrer les données de conversation.
Les centraux enregistrent et conservent pendant une période de temps limitée diverses données reliées à la connexion des téléphones cellulaires au réseau. La période de conservation de ces données varie en fonction du type de donnée, par exemple les données de localisation des antennes avec lesquelles un téléphone cellulaire s’est connecté ou bien les données sur l’angle du signal capté par une antenne donnée. Une fois cette période écoulée, les données sont automatiquement effacées du central.
Dans l’événement à l’étude, les données de localisation des antennes qui ont capté les téléphones cellulaires des occupants étaient conservées durant une période de 14 mois alors que les données relatives aux angles des signaux captés n’étaient conservées que durant 7 jours.
Le fournisseur de service téléphonique était conscient que des données historiques risquaient d’être perdues si une demande pour les obtenir était déposée une fois la période de conservation de ces données échue. Le fournisseur a donc pris l’initiative de sauvegarder une copie de toutes les données historiques relatives aux téléphones cellulaires des 2 occupants avant que celles-ci ne soient effacées. Lorsque le fournisseur a reçu une demande officielle pour communiquer ces données, il a pu transmettre la totalité des données et ce, même si la demande lui est parvenue 8 jours après l’accident, soit une fois le délai de conservation de certaines données échu.
1.15.2.4 Localisation d’un téléphone cellulaire
Il existe 3 outils principaux pour localiser un téléphone cellulaire avec plus ou moins de précision, soit:
- la fonction GPS intégrée au téléphone cellulaire, s’il s’agit d’un téléphone intelligent;
- un détecteur de signaux cellulaires portatif;
- la triangulation calculée à partir des données historiques.
En cas d’urgence, le fournisseur de service téléphonique peut, à la demande des services d’urgence, interroger à distance le GPS intégré au téléphone afin de connaître sa position exacte en temps réel, et ce, sans délaiNote de bas de page 27. Pour cela, le téléphone doit être allumé et fonctionnel, doit pouvoir capter les satellites et être connecté au réseau cellulaire. Si le téléphone cellulaire n’est pas fonctionnel parce qu’il est brisé ou que sa batterie est déchargée, la localisation en temps réel devient alors impossible.
Il est également possible de localiser un téléphone cellulaire grâce à un détecteur portatif qui détecte, à l’intérieur d’un rayon donné, les ondes émises par le téléphone. Pour cela, le téléphone doit être fonctionnel et allumé, sans qu’une connexion au réseau cellulaire ne soit nécessaire. Il est à noter que les aéronefs des FAC ne sont pas dotés de ce type d’équipement.
Finalement, la triangulation à partir des données historiques ne permet pas de localiser un téléphone cellulaire mais plutôt de déterminer le secteur ou l’endroit d’où provenait la dernière connexion du téléphone au réseau cellulaire. Ces données historiques, conservées entre autres par le fournisseur de service cellulaire, peuvent être partagées à un demandeur si ce dernier est en possession d’une ordonnance de la cour car il s’agit de renseignements personnels protégés. Il est à noter que le JRCC n’a pas l’autorité nécessaire pour obtenir une telle ordonnance, et ne peut donc pas avoir accès à ces informations.
Dans l’événement à l’étude, 9 tentatives pour localiser les téléphones cellulaires des occupants avec la fonction GPS ont été faites entre le 1er et le 4e jour des recherches, toutes infructueuses. Un détecteur de signaux cellulaires portatif a été utilisé par la SQ le 9e jour des recherches, sans succès. Le fournisseur de service a reçu une ordonnance de la cour le 18 juillet, soit 8 jours après l’accident, pour transmettre aux autorités policières des données historiques provenant des téléphones cellulaires des occupants. Les informations ont été transmises aux autorités policières dès le lendemain et ce, même si un délai de 30 jours était alloué au fournisseur pour communiquer ces informations.
1.15.2.5 Zones de recherche
Lorsqu’un aéronef est porté disparu et que seuls le point de départ et la destination finale sont connus, il faut tenter de découvrir les endroits potentiels où l’aéronef a pu se rendre en plus de considérer le trajet en ligne droite vers la destination finale. Connaître la quantité de carburant à bord aide à restreindre le périmètre de recherche en fonction de l’autonomie de vol restante et de la vitesse de croisière de l’aéronef. De manière générale, un avion parcourt plus de distance qu’un hélicoptère parce qu’il vole plus vite et il est plus susceptible d’être détecté par les radars parce qu’il vole plus haut. Les hélicoptères volent habituellement sous la couverture des radars et ne dépendent pas d’installations particulières pour atterrir, ce qui peut compliquer les recherches.
Dans l’événement à l’étude, le pilote possédait d’autres propriétés qui ont été considérées comme des destinations alternatives possibles à Sainte-Sophie. Les diverses informations reçues ont incité le JRCC à étendre la zone initiale des recherches aériennes vers le nord et le nord-ouest du lac De La Bidière. Cette zone initiale représentait une superficie d’environ 26 750 kilomètres carrés (figure 16).

Le JRCC devait également composer avec des éléments hors de son contrôle. Ainsi, l’autonomie en vol des hélicoptères Griffon, limitée à environ 2,5 heures, a empêché leur utilisation dans les secteurs trop éloignés des points de ravitaillement. Un hélicoptère Cormorant, possédant une autonomie d’environ 5 heures de vol, a donc été demandé et s’est joint aux recherches la 4e journée. Les mauvaises conditions météorologiques ont aussi occasionné plusieurs retards dans les recherches. Finalement, la forte densité de la forêt a nui considérablement en empêchant les observateurs de bien voir sous le couvert des arbres, ce qui a forcé le rapprochement des lignes de survol et augmenté le temps nécessaire pour effectuer les vols de recherche.
Le 13 juillet, lorsque le JRCC a eu la certitude que l’hélicoptère avait décollé en direction sud, la zone des recherches a pu être réduite à 11 320 kilomètres carrés. Le 16 juillet, une nouvelle réduction de la zone à 3600 kilomètres carrés a été possible grâce aux premiers résultats issus des calculs de triangulation; la réduction s’est poursuivie progressivement jusqu’à atteindre 2058 kilomètres carrés. N’ayant plus de nouvelles informations à traiter et ayant survolé tous les secteurs plus d’une fois, incluant l’endroit où se trouvait l’aéronef, le JRCC a cessé ses opérations de recherche le 21 juillet 2019. La responsabilité des recherches a été transférée à la SQ.
Les calculs de triangulation se sont poursuivis suite à l’obtention de données plus précises, jusqu’à obtenir, le 24 juillet, un point de triangulation qui a permis aux équipes de recherche de trouver l’aéronef le lendemainNote de bas de page 28.
1.16 Essais et recherche
1.16.1 Rapports de laboratoire du BST
Le BST a produit les rapports de laboratoire suivants dans le cadre de la présente enquête :
- LP167/2019 – ELT Analysis [Analyse de l’ELT]
- LP181/2019 – NVM Recovery GPS and PEDs [Récupération des données des mémoires non volatiles des GPS et appareils électroniques personnels]
- LP183/2019 – Fuel Inspection [Inspection du carburant]
- LP184/2019 – Passenger Seatbelt Examination [Examen de la ceinture de sécurité du passager]
- LP186/2019 – Warning Lamp Analysis [Analyse des lumières d’avertissement]
- LP187/2019 – Aircraft Instrument Analysis [Analyse des instruments]
- LP188/2019 – Aircraft Radio – Transponder Analysis [Analyse de la radio et du transpondeur]
- LP195/2019 – MRB Examination and Failure Analysis [Examen des pales du rotor principal et analyse des défaillances]
- LP267/2019 – Engine Examination [Examen du moteur]
- LP083/2020 – Impact Force Estimation [Estimation de la force d’impact]
1.17 Renseignements sur les organismes et sur la gestion
Sans objet.
1.18 Renseignements supplémentaires
Sans objet.
1.19 Techniques d’enquête utiles ou efficaces
Sans objet.
2.0 Analyse
2.1 Généralités
Le pilote possédait la licence et les qualifications requises pour effectuer le vol. Cependant, le certificat médical était expiré depuis octobre 2018 ce qui ne lui permettait plus d’exercer les privilèges de sa licence et ses qualifications. Toutefois, rien n’indique que la fatigue ou d’autres facteurs médicaux, pathologiques ou physiologiques aient nui à la performance du pilote.
Les conditions météorologiques qui prévalaient étaient favorables au vol selon les règles de vol à vue (VFR), du carburant propre et de type approprié se trouvait dans les réservoirs et l’examen du moteur et de ses composants n’a révélé aucune anomalie qui aurait pu jouer un rôle dans l’événement à l’étude.
Par conséquent, l’analyse portera sur les points suivants :
- la défaillance en vol d’une des pales du rotor principal;
- l’inspection des pales;
- la survie des occupants;
- le déroulement des recherches.
2.2 Défaillance d’une des pales du rotor principal
L’examen initial du site de l’accident et de l’épave, ainsi que l’examen des pales du rotor principal, ont permis de constater que la trajectoire de descente était quasi-verticale et que les pales ne tournaient presque plus au moment où l’aéronef est tombé au travers des arbres. Ceci indique que la vitesse de rotation des pales lors du vol est descendue à un niveau suffisamment bas pour empêcher l’aéronef de rester en vol et le pilote de pouvoir effectuer un atterrissage contrôlé.
Par ailleurs, l’examen approfondi des déformations du revêtement extérieur des pales a permis d’établir qu’elles étaient le résultat de mouvements excessifs de torsion et de flexion survenus en vol et que les déformations de torsion sont probablement apparues avant les déformations de flexion.
Une déformation en torsion est le résultat d’une perte de rigidité dans la structure de la pale. Durant le vol, en raison des contraintes et des forces appliquées, si une pale perd de sa rigidité, son profil ne pourra pas rester intact et se déformera. La déformation du profil crée un déséquilibre entre les 2 pales, ce qui peut engendrer un battement excessif, occasionnant des déformations du revêtement en flexion, comme celles observées sur chacune des pales. Une telle situation peut rapidement causer une perte de maîtrise de l’aéronef et potentiellement mener à une dislocation de l’aéronef en vol.
Lors de l’examen, l’une des pales a révélé de multiples défaillances d’adhésion sur la même section, non reliées à l’impact avec les arbres lors de la descente.
Ces défaillances ont mené à la séparation de certaines sections du joint entre le revêtement de l’intrados et le longeron permettant à l’humidité de s’infiltrer sous le revêtement ce qui, au fil du temps, a causé la dégradation de l’adhésion au joint de collage.
De plus, l’examen de la pale présentait une absence d’empreintes sur l’adhésif appliqué entre la face arrière du longeron et le corps en nid d’abeille sur une longueur cumulative de 20 pouces. Ceci indique qu’il n’y a jamais eu de liaison à cet endroit et que ce défaut de fabrication existait depuis l’assemblage initial de la pale.
Fait établi quant aux causes et aux facteurs contributifs
Il est probable que la progression des défaillances d’adhésion apparues avec le temps et la préexistence d’un défaut de fabrication ont contribué à réduire considérablement la rigidité de l’une des pales, ce qui a occasionné de fortes vibrations au cours du vol à l’étude.
Un pilote confronté à d’importantes vibrations aura tendance à vouloir manœuvrer pour atterrir le plus rapidement possible. Comme l’examen du moteur n’a trouvé aucune anomalie mécanique ou dysfonctionnement, ni les signes typiques qu’il tournait au moment de l’impact, il est possible que le pilote ait coupé le moteur pour tenter de réduire l’intensité des vibrations.
Fait établi quant aux causes et aux facteurs contributifs
À un certain moment, la vitesse de rotation du rotor principal est descendue à un niveau trop bas, empêchant l’aéronef de rester en vol, suivie d’une chute verticale et de l’impact avec le sol.
2.3 Inspection des pales
Le modèle de pale à l’étude avait une durée de vie utile de 2200 heures ou 12 ans, selon la première éventualité. Toutefois, il était connu que ce modèle était sujet à des défaillances de liaison bien avant la fin de sa durée de vie utile. Dans l’événement à l’étude, les pales avaient accumulé environ 770 heures de vol en 10 ans.
Afin d’assurer l’état de navigabilité de l’aéronef, les exigences de la consigne de navigabilité (CN) 2014-23-16 devaient être appliquées par le pilote de l’aéronef en cause depuis son achat en 2015 jusqu’à la date de retrait en service obligatoire des pales, soit le 9 janvier 2020. La CN exigeait, entre autres, qu’une inspection soit effectuée par un technicien à un intervalle ne dépassant pas les 100 heures de service en vol ou lors de l’inspection annuelle selon la première éventualité et qu’une vérification visuelle avant le premier vol de la journée soit effectuée par au moins un pilote qualifié.
2.3.1 Maintenance
Même si le pilote ne faisait pas vérifier les pales à tous les 4 mois par un technicien tel que recommandé par Robinson Helicopter Company (RHC), et il n’y était pas obligé, la dernière inspection des pales datait du 3 avril 2019, moins de 4 mois avant l’accident. L’inspection avait été effectuée conformément à la révision A du bulletin de service SB72 et aucune anomalie n’avait été décelée à ce moment.
La méthode d’inspection utilisée était le tap test. Même si le tap test peut permettre de découvrir des anomalies de liaison, sa fiabilité dépend, entre autres, du niveau d’expérience que possède le technicien qui l’effectue et des conditions dans lesquelles ce test est effectué. Par exemple, un technicien qui n’effectue pas régulièrement ce test, ou qui l’exécute dans un environnement bruyant, pourrait avoir de la difficulté à percevoir les variantes de sonorité plus subtiles causées par des défauts de liaison de dimension restreinte. Même si un changement de sonorité perçu conduit automatiquement au retrait du service de la pale, le fait de ne pas percevoir de changement dans la sonorité ne garantit pas l’absence d’anomalie de liaison.
L’examen approfondi des défaillances d’adhésion a permis d’établir qu’elles ne sont pas apparues soudainement et qu’il y a eu progression au fil du temps.
Fait établi quant aux causes et aux facteurs contributifs
Il est probable qu’au moment de la dernière inspection en avril 2019, des défaillances d’adhésion étaient déjà présentes et n’ont pas été détectées par le tap test.
2.3.2 Pré-vol
Avant le premier vol de chaque journée, une inspection visuelle des pales à l’intrados devait être effectuée afin de détecter toute mise à nue de la surface métallique au niveau du joint de collage entre le revêtement et le longeron, tel qu’exigé dans la CN 2014-23-16. Il était également requis d’effectuer et d’inscrire au carnet de route les actions afin de maintenir la validité du certificat de navigabilité de l’aéronef. Si l’inspection visAvant le premier vol de chaque journée, une inspection visuelle des pales à l’intrados devait être effectuée afin de détecter toute mise à nue de la surface métallique au niveau du joint de collage entre le revêtement et le longeron, tel qu’exigé dans la CN 2014-23-16. Il était également requis d’effectuer et d’inscrire au carnet de route les actions afin de maintenir la validité du certificat de navigabilité de l’aéronef. Si l’inspection visuelle révélait la présence d’une érosion importante de la peinture laissant paraître une surface métallique, la pale devait être inspectée par un technicien avant le vol. Si le technicien constatait un décollement ou de minuscules trous, la pale devait être retirée du service immédiatement.
L’examen des pales qu’a effectué le BST a révélé que des surfaces métalliques mises à nue au niveau du joint entre le revêtement de l’intrados et le longeron sur l’une des pales auraient été visibles et détectables avant le décollage du vol en question dans des conditions d’observation optimales permettant de repérer de tels détails.
L’enquête n’a pas pu déterminer si le pilote a identifié cette condition avant d’entreprendre le vol. Cependant, les différentes conditions d’éclairage et le manque d’équipements comme un escabeau peuvent nuire à l’efficacité de l’inspection visuelle des pales puisqu’elles sont situées en hauteur. Par exemple, effectuer l’inspection visuelle à contre-jour rend plus difficile la détection des petites surfaces métalliques mises à nu, et celles-ci risquent de passer inaperçues.
L’enquête a révélé que le pilote connaissait l’existence de la CN et ses exigences. Cependant, contrairement aux instructions de celle-ci, les inspections visuelles obligatoires n’ont jamais été consignées dans le carnet de route de l’aéronef depuis son acquisition en 2015, ce qui invalidait le certificat de navigabilité de l’aéronef. Même si l’absence d’inscription dans le carnet de route ne signifie pas que l’inspection visuelle n’était pas effectuée, les informations recueillies ne permettent pas d’affirmer que la CN était respectée telle que prescrite.
2.4 Survie des occupants
À l’arrivée des premiers répondants, le corps du pilote était à l’intérieur de l’aéronef tandis que le corps du passager se trouvait 66 mètres plus loin. Les informations recueillies au cours de l’enquête laissent croire que seul le passager aurait survécu un certain temps après l’impact initial. La force de décélération subie par le passager, évaluée en fonction des dommages causés à l’aéronef et de son poids, a été estimée à entre 17 G et 36 G. Or, le niveau de tolérance typique du corps humain, établi à entre 20 G et 25 G pour une décélération verticale, est compris dans cette plage de valeur.
Fait établi : Autre
Par conséquent, l’impact offrait une possibilité de survie au passager.
Cela soulève donc des questions quant aux autres facteurs qui ont pu influer sur ses chances de survie dans l’événement.
Il est reconnu que dans toute situation où une personne est blessée, ses chances de survie peuvent dépendre de la rapidité avec laquelle elle reçoit des soins. Dans bien des cas où il y a une population dense, les services d’urgence sont prévenus rapidement par un ou des témoins, grâce notamment aux téléphones cellulaires, très répandus de nos jours. Dans ces cas, les délais d’intervention dépendent plutôt du temps que prendront les secours à arriver sur les lieux de l’accident.
Lorsqu’un aéronef s’écrase dans une zone non habitée, il est peu probable qu’une tierce personne soit témoin ou se rende compte de l’accident et avise les services d’urgence. Il faut donc compter sur d’autres moyens, comme la radiobalise de repérage d’urgence (ELT), pour prévenir les services d’urgence, surtout si les personnes blessées ne sont pas en mesure d’appeler les secours.
2.4.1 Radiobalise de repérage d’urgence
Fait établi : Autre
L’interrupteur de l’ELT a été trouvé à la position OFF et l’interrupteur à distance de l’ELT a été trouvé à la position ON.
L’examen de l’interrupteur à distance n’a révélé aucune anomalie ni aucun bris. Pour déplacer le levier de l’interrupteur vers la position ON, il faut d’abord le tirer vers le haut. Il est donc improbable qu’un objet non arrimé l’aie fait basculer à la position ON lors de l’impact. Il est possible qu’un des occupants ait déplacé le levier de l’interrupteur à distance à la position ON. Cette action n’a toutefois pas activé l’ELT, car son propre interrupteur se trouvait à la position OFF et que le fil reliant l’interrupteur à distance et l’ELT était sectionné.
L’enquête n’a pas permis de déterminer si l’interrupteur de l’ELT était à la position ARM avant l’impact. Cependant, moins de 4 mois avant l’accident, l’ELT avait été réinstallée dans l’aéronef après sa recertification et avait réussi un test de fonctionnement, ce qui indique que l’interrupteur était à la position ARM à ce moment-là. Par la suite, aucune inscription au carnet de route n’indiquait que l’ELT avait fait l’objet d’auto-tests de façon régulière comme le recommande le fabricant. Ce test aurait permis de détecter la mauvaise position de l’interrupteur si ce dernier avait été déplacé à la position OFF dans la période entre sa recertification et l’accident.
Les tests effectués sur l’ELT en cause ont permis de déterminer que les butées de verrouillage de l’interrupteur de l’ELT, entre la position OFF et la position ARM, étaient brisées depuis un moment, ce qui permettait à l’interrupteur de basculer entre les 2 positions sous l’effet d’une force minimale de 1,8 G. Sachant que l’interrupteur était à la position ARM moins de 4 mois avant l’accident, il est raisonnable de croire que ce dernier a basculé à la position OFF lors de l’accident puisque la force subie à l’impact était bien supérieure à la force minimale de 1,8 G.
L’examen de l’ELT a démontré que si les butées de verrouillage avaient été intactes et l’interrupteur avait été à la position ARM, l’ELT aurait transmis un signal de détresse, ce qui aurait permis aux équipes de recherche et sauvetage de retrouver l’aéronef rapidement grâce aux informations de localisation.
Fait établi quant aux risques
Lors de l’inspection de maintenance d’une ELT, si une anomalie n’est ni détectée ni corrigée, il y a un risque que l’ELT ne se déclenche pas lors d’un accident, ce qui retarderait les recherches et le sauvetage et pourrait réduire les chances de survie des occupants.
2.4.2 Plan de vol ou itinéraire de vol
Bien que la réglementation en vigueur exigeait le dépôt soit d’un plan de vol, soit d’un itinéraire de vol, la méthode la plus fiable pour réduire le temps nécessaire au déclenchement des recherches en l’absence d’un signal de détresse est le dépôt d’un plan de vol. Dans l’événement à l’étude, aucun plan de vol ou itinéraire de vol n’avait été déposé, ce qui a retardé le déclenchement des recherches, qui ont été entamées 23 heures après l’accident. Ceci représente un délai suffisamment long pour avoir un impact non négligeable sur la survie d’un occupant blessé, qui verra ses chances de survie diminuer de près de 80 % au cours des premières 24 heures, d’après les études sur le sujet.
Les informations contenues dans un plan de vol et un itinéraire de vol sont immédiatement disponibles et sont très utiles aux équipes de recherche, qui peuvent entreprendre les recherches rapidement et efficacement lorsqu’avisées d’un aéronef en retard. Le manque d’informations disponibles sur le vol à l’étude lors du déclenchement des recherches a contribué à l’étalement de la zone initiale des recherches sur 26 750 kilomètres carrés et à l’augmentation des besoins en effectifs afin de couvrir une telle superficie. Jumelée à l’absence de signal de détresse, le fait d’avoir omis de déposer un plan de vol ou un itinéraire de vol a probablement eu un impact sur les chances de survie.
Fait établi quant aux risques
Si aucun plan de vol ou un itinéraire de vol n’est déposé, il y a un risque pour que le déclenchement des recherches ne soit pas effectué dans un délai raisonnable surtout si aucun signal de l’ELT n’est reçu, ce qui réduit les chances de survie des occupants et prive les équipes de recherche et sauvetage d’informations importantes pour les recherches.
2.5 Déroulement des recherches
Les recherches ont mobilisé 18 aéronefs, 44 observateurs et 77 personnes au sol durant les 11 jours d’opération du Centre conjoint de coordination des opérations de sauvetage (JRCC). Même bien organisée et avec suffisamment d’effectifs, toute opération de recherche peut faire face à des contraintes qui pourraient avoir une incidence sur le temps nécessaire pour retrouver un aéronef porté disparu.
Dans l’événement à l’étude, la contrainte majeure qui a empêché les équipes de recherche de localiser l’aéronef du haut des airs, même si elles avaient survolé plusieurs fois le lieu de l’accident, était le couvert forestier dense. De plus, la chute quasi-verticale de l’aéronef au travers des arbres n’a pas créé de traînée de branches cassées ou d’arbres brisés, qui aurait constitué un bon indice visuel et qui aurait peut-être permis de localiser l’aéronef plus rapidement.
L’aéronef n’a pu être retrouvé que grâce aux données historiques provenant des téléphones cellulaires des occupants, qui ont permis d’effectuer plusieurs calculs de triangulation jusqu’à l’obtention d’un point précis situé à 193 m de l’épave. Cependant, même si la triangulation est une méthode bien connue, plusieurs données utilisées pour les calculs de triangulation sont de l’information protégée et ne peuvent être obtenus qu’avec une ordonnance judiciaire. Le JRCC n’a pas l’autorité nécessaire pour demander une ordonnance judiciaire et dépend donc des autorités policières.
Fait établi : Autre
Par conséquent, le JRCC n’a pas eu accès à toute l’information pouvant lui permettre de retrouver l’aéronef porté disparu.
Fait établi : Autre
De plus, l’ordonnance judiciaire pour obtenir les données historiques des téléphones cellulaires des occupants a été déposée auprès du fournisseur de service téléphonique 8 jours après l’accident.
En temps normal, ce délai de 8 jours dépasse la première échéance du délai de conservation de certaines données dont l’effacement du système se fait automatiquement. Dans l’événement à l’étude, le fournisseur de service avait pris l’initiative de sauvegarder toutes les données avant leur effacement, ce qui lui a permis de transmettre la totalité des données lorsque l’ordonnance judiciaire lui est parvenue.
Même si, dans l’événement à l’étude, la triangulation a permis de retrouver l’aéronef, cette méthode ne permet pas de localiser un téléphone cellulaire mais plutôt d’établir l’endroit d’où la dernière connexion du téléphone avec le réseau cellulaire a eu lieu. Par ailleurs, en raison des délais administratifs qui y sont associés et du temps nécessaire pour effectuer les calculs, la triangulation n’est pas la méthode privilégiée pour localiser rapidement un aéronef porté disparu et augmenter les chances de survie des occupants.
La localisation en temps réel d’un téléphone intelligent avec l’aide de la fonction GPS est la méthode la plus efficace et rapide. Cependant, pour qu’elle soit possible, le téléphone cellulaire doit être allumé et fonctionnel et il doit pouvoir se connecter au réseau cellulaire et capter des satellites. Malgré que le JRCC ait demandé au fournisseur d’envoyer un « ping » aux téléphones dès le 1er jour des recherches, l’endroit où s’est produit l’accident ne permettait pas aux téléphones de se connecter au réseau cellulaire, et donc d’être localisés.
Une autre méthode de localisation consiste à utiliser un détecteur d’ondes cellulaires portatif. Même si le téléphone cellulaire doit être allumé, il n’est pas nécessaire qu’il soit connecté au réseau cellulaire, qu’il capte un satellite, ni même qu’il soit complètement fonctionnel; il doit seulement pouvoir émettre des ondes. Cela signifie que le temps restant avant que le téléphone ne perde sa capacité d’émettre tout signal dépendra du niveau de charge de sa batterie et des effets qu’aura son exposition aux éléments, la pluie par exemple.
Les aéronefs des Forces armées canadiennes utilisés pour les recherches et le sauvetage ne sont pas équipés de détecteurs d’ondes cellulaires; ces détecteurs n’ont donc pas pu être utilisés dès le début des recherches. Les 9 jours écoulés avant que les autorité policières n’utilisent un détecteur d’ondes cellulaires représentent un long délai, compte tenu de la durée moyenne d’autonomie des batteries des téléphones cellulaires actuels et de l’état et du niveau de charge inconnus des téléphones des occupants. Après un accident, il est important d’utiliser ces détecteurs rapidement car la capacité du téléphone cellulaire d’émettre des ondes peut faiblir très vite. L’enquête n’a pas évalué si l’utilisation précoce d’un détecteur d’ondes cellulaires aurait permis de localiser l’aéronef plus rapidement.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- Il est probable que la progression des défaillances d’adhésion apparues avec le temps et la préexistence d’un défaut de fabrication ont contribué à réduire considérablement la rigidité de l’une des pales, ce qui a occasionné de fortes vibrations au cours du vol à l’étude.
- La vitesse de rotation du rotor principal est descendue à un niveau trop bas, empêchant l’aéronef de rester en vol, suivie d’une chute verticale et de l’impact avec le sol.
- Il est probable qu’au moment de la dernière inspection en avril 2019, des défaillances d’adhésion étaient déjà présentes et n’ont pas été détectées par le tap test.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Lors de l’inspection de maintenance d’une radiobalise de repérage d’urgence, si une anomalie n’est ni détectée ni corrigée, il y a un risque que la radiobalise de repérage d’urgence ne se déclenche pas lors d’un accident, ce qui retarderait les recherches et le sauvetage et pourrait réduire les chances de survie des occupants.
- Si aucun plan de vol ou un itinéraire de vol n’est déposé, il y a un risque pour que le déclenchement des recherches ne soit pas effectué dans un délai raisonnable surtout si aucun signal de la radiobalise de repérage d’urgence n’est reçu, ce qui réduit les chances de survie des occupants et prive les équipes de recherche et sauvetage d’informations importantes pour les recherches.
3.3 Autres faits établis
Ces éléments pourraient permettre d’améliorer la sécurité, de régler une controverse ou de fournir un point de données pour de futures études sur la sécurité.
- L’impact offrait une possibilité de survie au passager.
- L’interrupteur de la radiobalise de repérage d’urgence a été trouvé à la position OFF et l’interrupteur à distance de la radiobalise de repérage d’urgence a été trouvé à la position ON.
- Le Centre conjoint de coordination des opérations de sauvetage n’a pas eu accès à toute l’information pouvant lui permettre de retrouver l’aéronef porté disparu, car celle-ci était protégée.
- L’ordonnance judiciaire pour obtenir les données historiques des téléphones cellulaires des occupants a été déposée auprès du fournisseur de service téléphonique après l’échéance de la période de conservation de certaines données.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Bureau de la sécurité des transports du Canada
Le 11 février 2020, le BST a émis l’Avis de sécurité aérienne A19Q0109-D1-A1 pour demander à Orolia, le fabricant des radiobalises de repérage d’urgence (ELT) de marque Kannad, et à Transports Canada (TC) de réviser les procédures d’inspection périodique des ELT afin qu’une défaillance du système de verrouillage de l’interrupteur puisse être détectée et corrigée à l’avenir.
4.1.1.1 Orolia
Dans sa réponse du 19 mars 2020, Orolia mentionne les mesures correctives suivantes :
- Dans les documents contenant des instructions de manœuvre de l’interrupteur, une mise en garde a été ajoutée afin de clarifier les instructions et éviter des manœuvres inadaptées pouvant entraîner le bris des butées de verrouillage de l’interrupteur.
- Dans les documents destinés à la maintenance des balises Kannad, une inspection visuelle des butées de verrouillage de l’interrupteur sera ajoutée.
- Une mise à jour des lettres de service intitulées « Periodic Inspection » concernant les ELT de la gamme Kannad 406 et des gammes Compact et Integra a été effectuée et est à la disposition du public sur le site internet de la compagnie.
- À titre préventif, d’autres documents pertinents ont été identifiés et seront mis à jour d’ici les 6 prochains mois.
4.1.1.2 Transports Canada
Le 1er août 2019, TC a mis à jour l’appendice G de la norme 571, qui traite de la maintenance des ELT. Cette mise à jour introduit l’exigence d’inspection visuelle des ELT.
Dans sa réponse du 3 avril 2020 à l’Avis de sécurité aérienne A19Q0109-D1-A1 émis par le BST le 11 février 2020, TC a mentionné que Transports Canada, Aviation civile ne prévoyait aucune autre modification aux Parties V et VI du Règlement de l’aviation canadien en ce qui concerne l’inspection des ELT pour les raisons suivantes :
- Des mesures correctives ont été prises par Orolia (voir les points mentionnés dans la section précédente).
- L’Agence de l’Union européenne pour la sécurité aérienne (EASA) en Europe ne prévoit pas prendre de disposition en raison du faible taux de défaillance enregistré pour ce modèle d’interrupteur entre la fin de 2007 et le 31 décembre 2019 et du fait que TC n’a reçu aucun rapport de difficulté en service lié à ce modèle d’interrupteur.
- La Circulaire d’information 571-025 intitulée « Maintenance des radiobalises de repérage d’urgence (ELT) » offre des lignes directrices pour vérifier l’état des ELT et est disponible au public sur le site internet de TC.
L’Alerte à la sécurité de l’Aviation civile (ASAC) 2020-05 portant sur l’inspection des ELT a été publiée par TC le 22 avril 2020 suite à l’Avis de sécurité aérienne A19Q0109-D1-A1 émis par le BST le 11 février 2020. L’ASAC porte sur l’inspection visuelle des ELT et insiste sur l’attention à porter à l’interrupteur à bascule des radiobalises.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le . Le rapport a été officiellement publié en premier lieu le .
Correction
Pour faire suite à des commentaires reçus après la publication du présent rapport, le Bureau a demandé un examen indépendant des conclusions de l’enquête sur la sécurité du transport aérien A19Q0109. Après avoir étudié le rapport d’examen en profondeur, le Bureau a apporté les modifications suivantes au présent rapport d’enquête :
À la section 1.12.3.2 Examen de la pale B :
- La phrase « Il est fort probable que les surfaces métalliques à ces endroits étaient visibles et détectables avant le décollage du vol en question. » a été modifiée comme suit : « Il est probable que les surfaces métalliques à ces endroits auraient été visibles et détectables avant le décollage du vol en question dans des conditions d’observation optimales permettant de repérer de tels détails. »
- La figure 9 a été modifiée pour mettre en évidence les parties métalliques visibles en ajoutant des flèches le long de la partie du longeron en question.
- Les phrases « Il a été établi que les mouvements de torsion se sont développés de façon progressive durant le vol, ce qui aurait engendré des vibrations dont l’intensité aurait progressé jusqu’à devenir sévères. Ces mouvements de torsion ont eu pour effet d’altérer de façon significative les performances aérodynamiques de la pale et la manœuvrabilité de l’aéronef. » ont été modifiées comme suit : « Il a été établi que les mouvements de torsion se sont développés de façon progressive, ce qui aurait engendré des vibrations en vol dont l’intensité aurait progressé jusqu’à devenir sévères. Ces mouvements de torsion, s’ils apparaissent en vol, peuvent altérer de façon significative les performances aérodynamiques de la pale et la manœuvrabilité de l’aéronef. »
Aux sections 2.2 Défaillance d’une des pales du rotor principal et 3.1 Faits établis quant aux causes et aux facteurs contributifs :
- Les deux faits établis quant aux causes et aux facteurs contributifs « Il est probable qu’au cours du vol à l’étude, une progression soudaine des défaillances d’adhésion a contribué à réduire considérablement la rigidité de l’une des pales, occasionnant des vibrations sévères. » et « Il est probable que ce défaut de fabrication a contribué à réduire la rigidité de la pale, aggravant les vibrations en vol occasionnées par les multiples défaillances d’adhésion. » ont été fusionnés et remplacés par le fait établi quant aux causes et aux facteurs contributifs suivant : « Il est probable que la progression des défaillances d’adhésion apparues avec le temps et la préexistence d’un défaut de fabrication ont contribué à réduire considérablement la rigidité de l’une des pales, ce qui a occasionné de fortes vibrations au cours du vol à l’étude. »
À la section 2.3.2 Pré-vol :
- Le fait établi quant aux causes et aux facteurs contributifs « L’examen des pales qu’a effectué le BST a révélé que des surfaces métalliques mises à nue au niveau du joint entre le revêtement de l’intrados et le longeron, sur l’une des pales, étaient présentes et probablement visibles à l’œil nu avant le vol à l’étude. » a été supprimé.
- La phrase « L’examen des pales qu’a effectué le BST a révélé que des surfaces métalliques mises à nue au niveau du joint entre le revêtement de l’intrados et le longeron sur l’une des pales auraient été visibles et détectables avant le décollage du vol en question dans des conditions d’observation optimales permettant de repérer de tels détails. » a été ajoutée.
Le Bureau a autorisé la présente correction le et la version corrigée du rapport a été publiée le .