Piper J3C-65 (hydravion), CF-SVT
Immatriculation privée
Aérodrome de La Tuque (Québec), 25 NM ENE
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Déroulement du vol
Le matin du 12 septembre 2021, vers 9 h 47Note de bas de page 1, l’hydravion Piper J3C-65 (immatriculation CF-SVT, numéro de série 14676) a décollé de la rivière Batiscan au niveau de la pourvoirie de la Seigneurie du Triton, située à 25 milles marins (NM) à l’est-nord-est de l’aérodrome de La Tuque (CYLQ) (Québec), pour un vol selon les règles de vol à vue (VFR) à destination de l’hydroaérodrome de Saint-Étienne-des-Grès / Hydravion Adventure (CHA2) (Québec). À bord se trouvaient le pilote, assis en place arrière, et un passager, assis en place avant. Il était prévu qu’après le décollage, le pilote survolerait les chalets de la pourvoirie pour permettre au passager de prendre des photos.
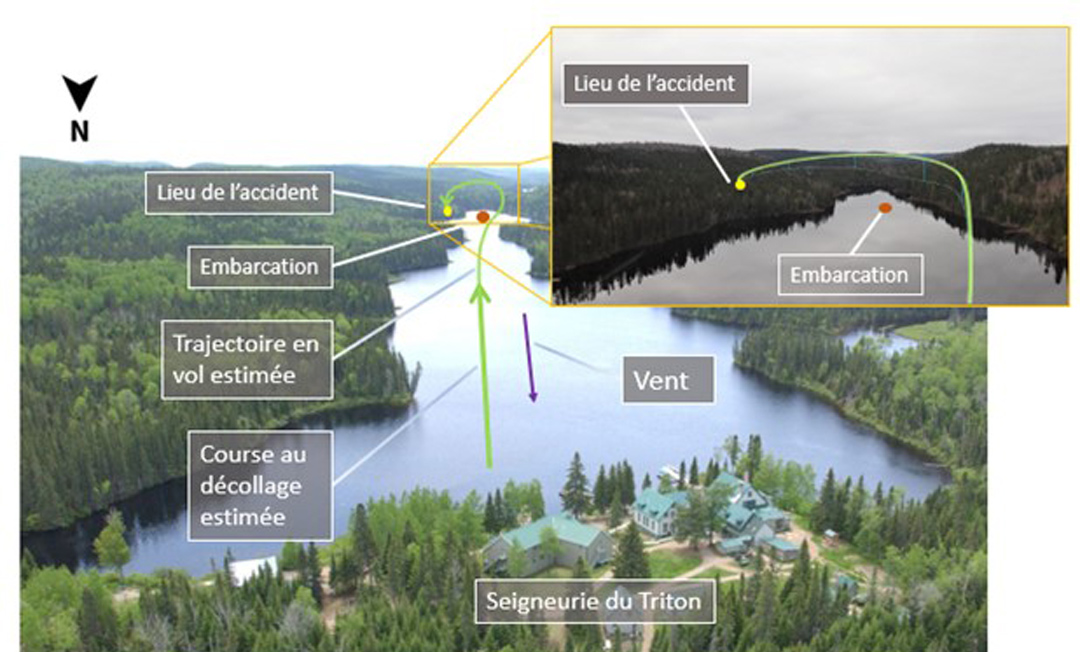
Après le décollage en direction sud, l’hydravion est resté près de la surface de l’eau (dans l’effet de solNote de bas de page 2) pour pouvoir atteindre plus rapidement la vitesse de montée cible de 70 mi/h. À environ 4300 pieds du point de départ, l’hydravion, toujours dans l’effet de sol, a bifurqué à droite pour éviter de survoler une embarcation. Environ 2000 pieds plus loin (c’est-à-dire à 6300 pieds approximativement du point de départ), il a monté légèrement à environ 100 pieds au-dessus de la rivière et a amorcé un virage de 180°par la gauche en direction d’un relief ascendant (figure 1). Pendant le virage à gauche à 45° d’inclinaisonNote de bas de page 3, sa vitesse et son altitude ont diminué. Le pilote a perdu la maîtrise de l’hydravion, qui a subi un décrochage aérodynamique menant à une autorotation de mise en vrille et a percuté les arbres, puis le sol, dans une assiette verticale.
Des personnes qui se trouvaient à proximité se sont dirigées vers le site de l’accident. L’aide des services d’urgence a été demandée. Le pilote a subi des blessures graves et le passager des blessures mortelles. Ils portaient tous les deux leur ceinture sous-abdominale. L’aéronef n’était pas muni de ceintures-baudriers, mais la réglementation n’en exigeait pas. L’aéronef a été détruit par la force de la collision. Aucun incendie ne s’est déclaré.
Site de l’accident et examen de l’épave
L’épave se trouvait sur le sol de la forêt à environ 65 pieds de la berge de la rivière. Les dommages aux arbres entourant le site de l’accident concordaient avec la descente verticale de l’aéronef. Les ailes s’étaient partiellement détachées du fuselage : l’aile de droite était repliée vers l’arrière et celle de gauche, affaissée au sol. Les dommages aux ailes et à la structure étaient la conséquence des forces de la collision et du travail des premiers intervenants.
La continuité des câbles actionnant les gouvernes a été établie. La déformation de la structure du fuselage et le déplacement des objets à l’intérieur de l’aéronef indiquent une force latérale importante de la droite vers la gauche au moment de la collision avec le sol. Le réservoir de carburant situé à l’avant du fuselage a été endommagé, ce qui a causé un déversement d'essence aviation (AVGAS) de moins de 25 L.
Renseignements sur le pilote
Le pilote avait la licence et les qualifications nécessaires pour effectuer le vol à l’étude conformément à la réglementation en vigueur. Il détenait une licence de pilote professionnel – avion et un certificat médical de catégorie 1, tous deux valides. Il détenait les qualifications suivantes : monomoteur, multimoteur, vol aux instruments (groupe 1) et hydravion. Il avait accumulé environ 1300 heures de vol, dont 790 sur hydravions et 78 sur l’hydravion à l’étude au moment de l’accident. Le pilote était venu une fois auparavant à cette pourvoirie, mais il n’avait jamais décollé en direction sud à cet endroit de la rivière Batiscan.

Renseignements sur l’aéronef
Le Piper Cub J3C-65 à l’étude avait été fabriqué en 1945, avait un certificat de navigabilitéNote de bas de page 4 (A691 – Normal) en vigueur et était équipé d’un moteur C-90-12F de 90 hp de marque Teledyne Continental (figure 2). Il avait accumulé 3862,5 heures de vol depuis sa fabrication et ne présentait aucune anomalie connue avant le vol à l’étude.
L’aéronef était équipé de flotteurs EDO 60-1320 et avait une masse maximale admissible au décollage de 1300 livres. Le calcul de masse et centrage effectué dans le cadre de l’enquête a permis de déterminer que la masse au décollage de l’aéronef était de 1367 livres pour le vol de l’événement à l’étude. La charge alaireNote de bas de page 5 augmente avec l’augmentation de la masse de l’aéronef, ce qui accroît à son tour la vitesse de décrochage et fait diminuer les performances en montée de l’aéronef.
Dans ce modèle d’aéronef biplace, le pilote est généralement assis en place arrière (avec ou sans passager). Ainsi, en présence d’un passager en place avant, le pilote du vol à l’étude ne voyait pas directement l’indicateur de vitesseNote de bas de page 6. L’aéronef n’était pas équipé d’avertisseur de décrochage, mais la réglementation n’en exigeait pas.
L’aéronef à l’étude était muni d’une radiobalise de repérage d’urgence (ELT) automatique fixe (fabriquée par ACK Technologies Inc., modèle E-01) pouvant transmettre sur les fréquences 121,5 MHz et 243 MHz seulement. Les signaux d’ELT sur ces fréquences peuvent être détectés par d’autres aéronefs ou par le contrôle de la circulation aérienne (ATC) qui surveillent ces fréquences. Toutefois, ces fréquences ne sont plus surveillées par le système d’aide à la recherche et au sauvetage par satellite (SARSAT) du Centre conjoint de coordination des opérations de sauvetage/Centre canadien de contrôle des missions de Trenton (Ontario). Dans l’événement à l’étude, même si l’ELT et l’antenne étaient en bon état, aucun signal d’ELT n’a été rapporté sur la fréquence de 121,5 MHz ni sur celle de 243 MHz, que ce soit par d’autres aéronefs ou par l’ATC.
Renseignements météorologiques
Les conditions météorologiques étaient propices pour effectuer ce vol VFR, mais un front froid s’approchait de l’ouest. Le mouvement dextrogyreNote de bas de page 7 du vent au passage du front froid fait qu’un vent initialement du sud change progressivement au sud-ouest et finalement à l’ouest après le passage du front. L’information recueillie au cours de l’enquête a permis de déterminer que le front était présent à proximité de la rivière Batiscan, mais n’a pas permis de déterminer avec précision l’heure du passage de ce front. Cependant, des vents forts du sud estimés à environ 15 nœuds au moment du décollage de l’hydravion à l’étude ont été rapportés par des personnes se trouvant à proximité.
Caractéristiques des vents près de la surface
Cette section de la rivière Batiscan est sujette à des vents changeant brusquement (cisaillement) en raison du relief, ce qui rend les conditions de vol difficiles. Le relief de chaque côté de la rivière favorise l’écoulement de l’air à très basse altitude en direction nord-sud à la surface de l’eau. Cependant, dans le cas du présent événement, en s’éloignant de la surface et en atteignant le sommet du relief à l’ouest, le vent a fort probablement changé de force et de direction (mouvement dextrogyre du sud au sud-ouest) en raison de la proximité du front froid. Ce changement de vent a pu occasionner un cisaillement horizontal du vent, de la turbulence et des courants descendants sous le vent des collines à l’ouest.
Finalement, le cisaillement vertical du vent, ou gradient du vent, cause un changement de la vitesse du vent à proximité du sol, en particulier en dessous de 100 pieds. Au sol, le vent est fortement freiné par les obstacles et la rugosité et les aspérités de la surface alors qu’en altitude, dans les couches d'air non perturbées du vent géostrophique, le vent n'est plus influencé par la surface. Entre ces 2 extrêmes, la vitesse du vent varie avec l'altitudeNote de bas de page 8.
Lors du vol à l’étude, l’aéronef survolait la rivière à basse altitude, à environ 65 pieds, lorsque le virage à gauche a été amorcé sous le vent des collines à l’ouest de la rivière. L’aéronef s’est ainsi retrouvé au-dessus des arbres à l’est de la rivière. Ainsi, il est possible que certains de ces facteurs liés aux vents près de la surface aient été présents et aient contribué à la réduction de la vitesse de l’aéronef et donc de sa performance.
Virages à basse altitude
Le vol à basse altitude réduit la marge de sécurité en cas de panne moteur, de perte de maîtrise ou de tout autre imprévu, tout en augmentant le risque de collision avec le sol. Par ailleurs, les virages à basse altitude entraînent des illusions d’optique qui peuvent fausser la perception de la vitesse et de la dérive et augmenter ainsi le risque de perte de maîtrise en vol. La gravité des conséquences d’une perte de maîtrise à basse altitude fait que les virages à basse altitude sont associés à un niveau de risque élevé.
Illusions d’optique liées au changement important de la vitesse sol
Un aéronef qui passe d’un vent de face à un vent de dos au cours d’un virage peut voir sa vitesse sol augmenter de façon importante. Dans ces conditions, le sol défile plus rapidement, et il est possible que le pilote surestime la vitesse réelle de l’aéronef et réduise sa vitesse suffisamment pour entraîner un décrochage. De plus, l’aéronef dont le taux de montée est fixe dans un virage, mais dont la vitesse sol double, voit son angle de montée réduit d’environ de moitié pour franchir les obstacles.
Illusions d’optique liées au vol à proximité du relief
Au cours de vols en montagne ou près de collines où le relief bloque la vue de l’horizon réelNote de bas de page 9, les pilotes peuvent avoir plus de difficulté à déterminer exactement l’assiette, l’altitude et la vitesse de l’aéronef, en particulier quand l’aéronef se trouve en contrebas du sommet du relief.
De plus, un relief ascendant en avant de sa trajectoire incite le pilote à augmenter l’assiette en cabré de l’aéronef, ce qui peut entraîner une baisse de la vitesse. Par ailleurs, au fur et à mesure que l’aéronef s’approche du relief ascendant, le pilote a de plus en plus l’impression de voler plus vite que s’il volait à la même vitesse mais à une altitude supérieure. Par conséquent, lorsqu’un pilote s’approche d’un relief ascendant, il se peut qu’il relève le nez de l’aéronef afin de maintenir un angle constant entre la partie de l’aéronef qui lui sert de référence et le relief ascendant. S’il ne consulte pas ses instruments et se fie uniquement aux indices visuels externes, le pilote aura plus de difficulté à reconnaître les effets d’un cabré sur les performances de l’aéronef en raison de ces illusions additionnelles découlant de la proximité du relief ascendantNote de bas de page 10.
Illusion d’optique créée par la dérive
La dérive est l’écart entre le cap d'un aéronef et sa trajectoire au-dessus du sol. La dérive d’un aéronef dans un virage près du sol par vent fort donne l’impression au pilote que l’aéronef change de vitesse, glisse vers l’intérieur ou dérape vers l’extérieur. Dans un virage à gauche, l’illusion créée par la dérive peut inciter un pilote à appliquer le palonnier du côté intérieur au virage et augmenter ainsi la probabilité que l’aile gauche décroche avant l’aile droite et provoque une autorotation de mise en vrille.
Illusion d’optique lors du virage sous la hauteur pivot
La hauteur pivot est la hauteur, pour une vitesse sol donnée, à laquelle, du point de vue du pilote, l’extension de l’axe latéral de l’appareil apparaît fixée sur un point au solNote de bas de page 11. À une vitesse sol de 50 mi/h, la hauteur pivot est de 168 pieds au-dessus du sol (AGL), alors qu’à 80 mi/h, elle est de 429 pieds AGL. Lorsque le pilote tourne à gauche sous la hauteur pivot, il peut avoir l’impression que l’aile descendante avance plus vite qu’à l’habitude, ce qui peut l’inciter à appliquer le palonnier du côté intérieur au virage et augmenter ainsi la probabilité que l’aile gauche décroche avant l’aile droite et provoque une autorotation de mise en vrilleNote de bas de page 12.
Dans l’événement à l’étude, le virage à gauche à basse altitude a été amorcé à une vitesse indiquée initiale d’environ 70 mi/h et quand le vent soufflait à environ 20 mi/h. La forte augmentation de la vitesse sol d’environ 50 mi/h (vent de face) à environ 90 mi/h (vent de dos), soit presque le double, a créé une forte illusion d’optique et s’est traduite par une réduction de l’angle de montée de presque 50 % pour franchir le relief à l’est de la rivière. Le virage ayant été effectué en contrebas du sommet du relief, il était plus difficile d’établir l’assiette de l’aéronef en relation à l’horizon réel. Pendant le virage, l’aéronef s’est retrouvé devant un relief ascendant, ce qui a pu inciter le pilote à augmenter l’assiette en cabré et ainsi entraîner une diminution de la vitesse.
L’illusion d’optique créée par la dérive était forte en raison des vents et de la vitesse de l’hydravion au moment du virage effectué à environ 65 pieds, soit sous la hauteur pivot. Ces dernières illusions, combinées à une faible vitesse, peuvent créer des conditions propices à une perte de maîtrise.
Décrochage aérodynamique
Un décrochage aérodynamique est une perte de portance et une augmentation de traînée qui se produit lorsque l’aéronef vole à un angle d’attaque supérieur à l’angle qui assure la portance maximale. Quelle que soit sa vitesse, un aéronef décroche toujours lorsque les ailes atteignent cet angle d’attaque critiqueNote de bas de page 13. La vitesse de décrochage quant à elle varie notamment selon le poids, la puissance, la position des volets et l’angle d’inclinaison.
Lors d’un virage, plus l’angle d’inclinaison est grand, plus la portance doit être importante pour maintenir une altitude constante. À un angle d’inclinaison de 45°, il faut environ 30 % plus de portanceNote de bas de page 14 pour maintenir la même altitude. Cette augmentation de la portance engendre une augmentation de la traînée et donc une diminution de la vitesse, qui à son tour augmente le risque de décrochage. Pour maintenir la vitesse dans un virage, il faut donc augmenter la puissance.
Selon le manuel de vol de l’aéronef à l’étude, la vitesse de décrochage était de 38 mi/h en vol rectiligne et de 47,5 mi/h à 50°d’inclinaison. Ces vitesses de décrochage avaient été calculées en fonction de la masse maximale admissible au décollage (1200 livres) indiquée pour l’aéronef J3C-65 dans la 1re édition du manuel. Lorsque les flotteurs ont été installés, les modifications nécessaires pour augmenter la masse maximale de 100 livres ont été effectuées. Puisque la masse au décollage du vol à l’étude était de 1367 livres, les vitesses de décrochage réelles étaient plus élevées que celles publiées.
Autorotation de la mise en vrille
La vidéo prise à bord de l’aéronef à l’étude par le passager a permis de déterminer que, pendant le virage à gauche, l’aéronef est entré dans une autorotation de mise en vrilleNote de bas de page 15 et a ensuite percuté les arbres. Cette perte de maîtrise est survenue pendant un virage effectué à basse altitude alors que l’aéronef passait d’un vent de face à un vent de dos. Plusieurs facteurs aggravants étaient par ailleurs présents : une charge alaire élevée en raison de la masse et de l’inclinaison à 45° de l’aéronef, la force des vents à basse altitude et des illusions d’optique lors de ce virage.
Pour contrer la majorité de ces facteurs aggravants, l’indicateur de vitesse est la défense principale dont le pilote dispose pour déceler une perte de performance (vitesse), et ainsi prendre conscience des différentes illusions dont il est victime. Étant donné que le pilote de l’aéronef à l’étude était assis à l’arrière du passager, l’indicateur de vitesse n’était pas directement dans son champ visuel. En l’absence d’un avertisseur de décrochage, le pilote ne pouvait pas facilement déceler qu’un décrochage était imminent.
Message de sécurité
Les pilotes doivent être conscients que les virages serrés à basse altitude comportent un risque élevé en raison de la réduction de la performance de l’aéronef, de l’augmentation de la vitesse de décrochage, des caractéristiques des vents près de la surface et des illusions d’optique qui peuvent fausser la perception de la vitesse et de la dérive. Ces virages devraient normalement être évités, mais s'ils sont effectués, il est essentiel que les pilotes prennent ces facteurs en considération et surveillent étroitement la vitesse indiquée pour éviter une perte de maîtrise en vol.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le Le rapport a été officiellement publié le