Heurt du poste d’accostage no 2
Traversier roulier Seaspan Swift
Tilbury Island, Delta (Colombie-Britannique)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
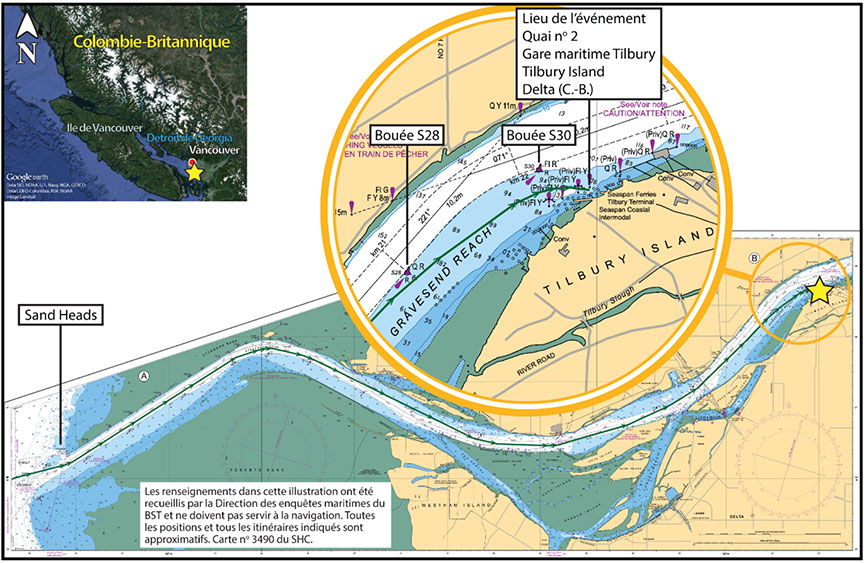
Le 15 novembre 2017, à 15 h 34, heure normale du Pacifique, le traversier roulier Seaspan Swift a heurté le poste d’accostage no 2 à la gare maritime de Seaspan Ferries sur Tilbury Island, à Delta (Colombie-Britannique). Dix membres d’équipage se trouvaient à bord du navire au moment de l’événement; 2 d’entre eux ont été légèrement blessés. La proue du navire ainsi que la rampe au poste d’accostage no 2 ont été endommagées. On n’a signalé aucune pollution.
This report is also available in English.
1.0 Renseignements de base
1.1 Fiche technique du navire
| Nom du navire | Seaspan Swift |
|---|---|
| Numéro officiel | 840354 |
| Port d'immatriculation | Vancouver (Colombie-Britannique) |
| Pavillon | Canadien |
| Type | Traversier |
| Jauge brute | 4810 |
| Longueur | 145,2 m |
| Construction | 2016 |
| Propulsion | 2 moteurs (carburant diesel/gaz naturel liquéfié) entraînant chacun un moteur électrique qui entraîne à son tour un propulseur omnidirectionnel. Puissance totale : 8800 kW (2 × 4400 kW) |
| Équipage (au moment de l'événement à l'étude) | 10 (l'effectif de sécurité minimal est de 7 membres) |
| Cargaison | 26 remorques |
| Propriétaire | Seaspan Ferries Corporation, Delta (C.-B.) |
1.2 Description du navire
Le Seaspan Swift (figure 1) est un traversier roulier de marchandises, dont les extrémités ne sont pas identiquesNote de bas de page 1. Il comprend un pont-garage et une superstructure située à l'avant du milieu du navire qui contient une passerelle et les quartiers de l'équipage. Le navire est propulsé par 2 moteurs bicarburants (gaz naturel liquéfié et carburant diesel marin) à vitesse constante. Chaque moteur entraîne une génératrice et alimente des tableaux de distribution électriques, qui alimentent à leur tour des moteurs électriques à vitesse variable (2 en tout). Chaque moteur entraîne un propulseur omnidirectionnelNote de bas de page 2 indépendant (ci-après appelé POD). Les POD sont munis d'hélices à 3 pales montées à chaque extrémité (annexe A). Les POD assurent à la fois la propulsion et la gouverne.

Les commandes de propulsion et d'appareil à gouverner se trouvent à la passerelle. Le navire est muni de 2 commandes manuelles d'appareil à gouverner : une barre à roue (ou roue de gouvernail) et des volants de POD. Le degré de rotation des POD varie selon le mode de fonctionnement sélectionné (port/mer) ou de commande de l'appareil à gouverner (barre à roue/POD)Note de bas de page 3. Le navire est également muni d'un pilote automatique.
La passerelle comprend l'équipement de navigation, entre autres des écrans radars, un compas magnétique et un compas gyroscopique, un système électronique de visualisation des cartes marines, un système de positionnement mondial, un pilote automatique, un radiotéléphone très haute fréquence (VHF), un échosondeur, un système d'identification automatique et un compteur de vitesse. Les commandes du système d'eau de lestage se trouvent à la passerelle. Le navire est muni d'un enregistreur des données du voyage (VDR), de 2 propulseurs d'étrave et de 2 ancres. On peut mouiller les ancres soit à distance depuis la passerelle, soit localement.
1.3 Déroulement du voyage
Le 15 novembre 2017, vers 12 h 50Note de bas de page 4, le Seaspan Swift, avec 10 membres d'équipage à son bord, a quitté la gare maritime de Swartz Bay à Victoria (Colombie-Britannique), à destination de la gare maritime Tilbury de Seaspan Ferries, sur Tilbury Island, à Delta (Colombie‑Britannique) (annexe B). L'équipage de service comprenait le capitaine de relève, le premier officier, 1 mécanicien, 1 cuisinier et 1 matelot de pont. Le capitaine habituelNote de bas de page 5, 1 mécanicien, 2 matelots de pont et le second officier se trouvaient également à bord, mais étaient en repos. Avant le départ, après de brèves formalités de transfert, le capitaine de relève a remplacé le capitaine habituel aux commandesNote de bas de page 6. Durant la traversée, le navire était en mode merNote de bas de page 7, et le pilote automatique était embrayé.
Au moment où le navire se trouvait à environ 3 milles marins de Sand Heads (annexe B), le premier officier a indiqué à la salle des machines de se préparer à l'arrivée. La gouverne du navire est passée du pilote automatique à la roue de gouvernail, que commandait le matelot de pont. À ce moment, la vitesse du navire était de 16 nœuds, et l'équipe à la passerelle comprenait le capitaine de relève, le premier officier et un matelot de pont. Vers 15 h 9, le matelot de pont à la roue de gouvernail a été relevé par un autre matelot de pont, qui a continué de gouverner avec la barre à roue.
À 15 h 14, le capitaine de relève a tenté de communiquer avec la gare maritime Tilbury par radiotéléphone VHF, mais la ligne était occupée. Le premier officier a alors rappelé la gare maritime avec le téléphone cellulaire de la compagnie pour obtenir un poste d'accostage; on lui a attribué le poste d'accostage no 2. Il a également vérifié les conditions de marées nécessaires pour aller à quai et a entrepris les travaux de ballastage depuis la passerelle.
Vers 15 h 17, au moment où le navire approchait de la bouée S28 (annexe B) à une vitesse de 16 nœuds, le capitaine de relève a pris la barre pour remplacer le matelot de pont, qui a ensuite quitté la passerelle pour amorcer les préparatifs d'accostage. À ce moment, le premier officier surveillait les travaux de ballastage, les activités du capitaine de relève et la progression du navire.
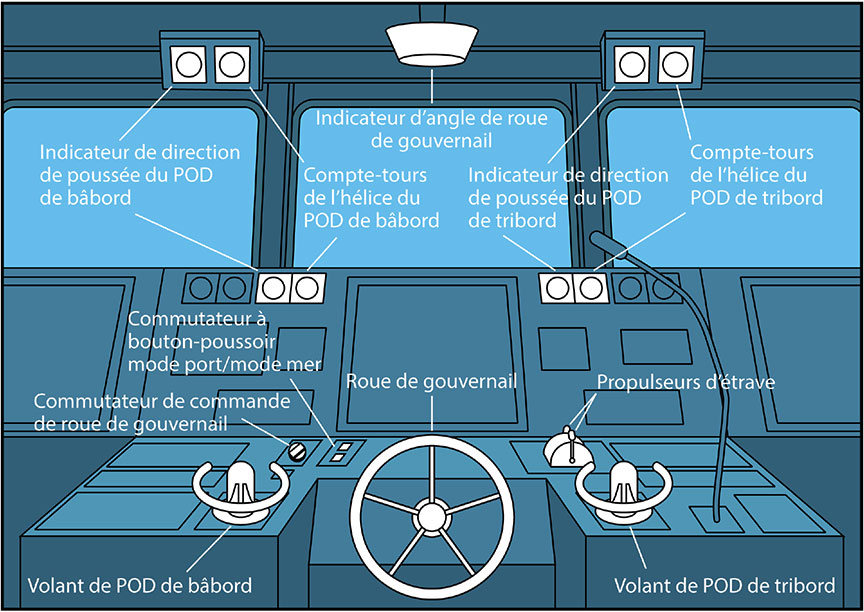
Vers 15 h 18, le capitaine habituel est monté à la passerelle en vue de remplacer le capitaine de relève une fois que le navire serait à quai. Le capitaine habituel se tenait prêt du côté bâbord du pupitre de commande de la passerelle, tout près d'un interrupteur électrique qui faisait saillieNote de bas de page 8 (figure 2).

À 15 h 19, le genou du capitaine habituel a touché l'interrupteurNote de bas de page 9, ce qui a momentanément éteint les deux écrans radars et activé le système lave-glace de la passerelle, qui a giclé de l'eau sur les fenêtres de la passerelle.
En quelques instants, le premier officier et le capitaine habituel ont déterminé que l'interrupteur était à l'origine du problèmeNote de bas de page 10. Le capitaine habituel s'est assuré de remettre l'interrupteur dans la bonne position. Le capitaine de relève, qui était toujours à la roue de gouvernail, et le premier officier ont ensuite vérifié le fonctionnement normal de l'ensemble des équipements de la passerelle, y compris les radars. Les radars avaient cessé leur balayage, et l'équipe à la passerelle ne les a pas initialisés. Le premier officier et les deux capitaines ont discuté de la défaillance et de certains équipements alimentés par cet interrupteur. L'équipe à la passerelle ne savait pas où était indiqué l'équipement alimenté par cet interrupteur; le capitaine de relève a dû s'informer auprès du capitaine habituel et du premier officier pour savoir quel équipement était alimenté par l'interrupteur. L'alimentation a été rétablie aux écrans radars, et l'équipage a repris ses postes et ses fonctions respectifs. Pendant que le voyage se poursuivait, le capitaine de relève, qui gouvernait toujours le navire avec la barre à roue, effectuait une vérification mentale pour s'assurer que tout l'équipement requis avait été réinitialisé.
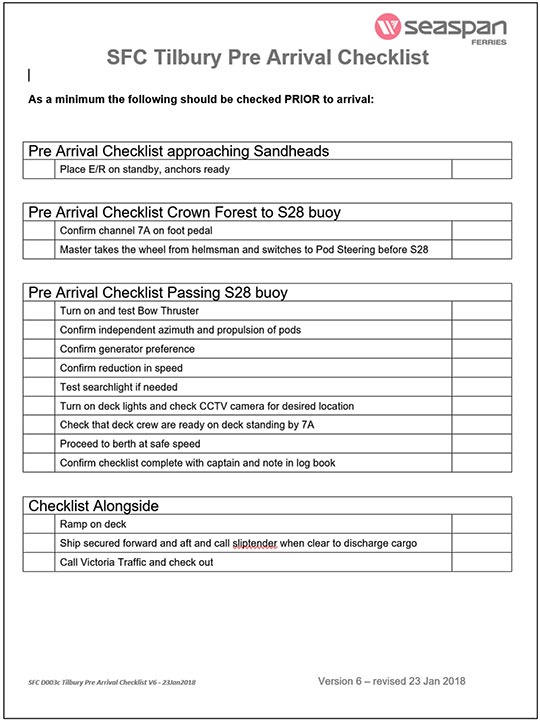
À 15 h 22, le premier officier a amorcé la liste de vérifications avant l'arrivée (annexe C). Il a vérifié quelques éléments de la liste en les annonçant. Le capitaine de relève a répondu à certains d'entre eux. Peu après, le capitaine de relève a démarré les propulseurs d'étrave.
À 15 h 23, le premier officier a poursuivi l'utilisation de la liste de vérifications et a demandé à voix haute si les POD étaient réglés en commande indépendante (c'est-à-dire, si l'on avait transféré la commande d'appareil à gouverner aux volants de POD). Le capitaine de relève n'a pas répondu. Ni le capitaine de relève ni le premier officier n'a repris la liste de vérifications par la suite.
Vers 15 h 23, la vitesse du navire avait diminué sous les 8 nœuds, ce qui a déclenché l'alarme du mode port. Le premier officier a entendu l'alarme, et le capitaine de relève l'a confirmée; celui-ci l'a ensuite interrompue en appuyant sur le bouton de mode port.
Vers 15 h 25, le navire a passé la bouée S28 à une vitesse de 7,2 nœuds. Le premier officier a poursuivi le ballastage.
Vers 15 h 27, le capitaine de relève à bord du Seaspan Swift a communiqué avec le capitaine du Seaspan Reliant, qui quittait le poste d'accostage no 2. Ils ont convenu d'une entente de croisement selon laquelle le Seaspan Reliant passerait à l'extérieur de la bouée S30 (annexe B).
Entre-temps, le capitaine de relève a commencé à surveiller 2 remorqueurs qui descendaient le fleuve avec un chaland et qui s'engageaient dans le chenal en provenance d'une gare maritime située de l'autre côté du fleuve, en face de la gare maritime Tilbury. Le Seaspan Greg, un autre navire de la compagnie, se dirigeait vers le poste d'accostage no 4, devant le Seaspan Swift. À un moment donné, les capitaines du Seaspan Reliant et du Seaspan Swift ont communiqué l'un avec l'autre pour modifier légèrement l'entente de croisement. Le Seaspan Reliant devait maintenant passer à l'intérieur de la bouée S30 pour laisser plus de place aux 2 remorqueurs et leur chaland, qui se trouvaient à ce moment dans le chenal.
À 15 h 31, à proximité de la bouée S30, le capitaine de relève a manœuvré légèrement le Seaspan Swift au moyen de la roue de gouvernail afin de permettre au Seaspan Reliant de passer entre la bouée S30 et le Seaspan Swift. À 15 h 33, le capitaine de relève a engagé les propulseurs d'étrave pour aligner le navire en vue de l'approche finale du poste d'accostage no 2. Peu de temps après, le capitaine de relève a communiqué avec les Services de communications et de trafic maritimes pour confirmer l'arrivée du navire à la gare maritime Tilbury.
À 15 h 32, le navire était aligné sur le poste d'accostage no 2 et se trouvait à environ 1 longueur de navire (quelque 145 m) de celui-ci. Le capitaine de relève a posé sa main sur le volant de POD de bâbord, l'a tourné sur 180°Note de bas de page 11 et a augmenté la poussée du POD de bâbord pour ralentir la vitesse avant du navire, qui était de 3,2 nœuds.
Or, le capitaine de relève a constaté que la vitesse du navire augmentait. Comme la vitesse du navire ne diminuait pas, il a jeté un coup d'œil à l'indicateur de direction de poussée du POD bâbord, situé au-dessus de la fenêtre de la passerelleNote de bas de page 12. L'indicateur était à la position de 12 heures, ce qui indique une poussée vers l'avant. Attribuant la réponse du navire aux conditions des vents et marées, il a augmenté encore la poussée pour freiner le mouvement du navire vers l'avant. Or, la vitesse a augmenté à 4,5 nœuds. C'est alors que le capitaine de relève s'est rendu compte que la commande d'appareil à gouverner était toujours réglée à la barre à roue. Il a rapidement transféré la commande aux volants de PODNote de bas de page 13 et tourné le volant de POD de tribord sur 180° pour effectuer un arrêt en catastropheNote de bas de page 14. Il appliquait une poussée arrière aux 2 POD lorsque, à 15 h 34, le navire a heurté le poste d'accostage à une vitesse de 4,1 nœuds. Les ancres ont été mis en attente, mais n'étaient pas déployés.
Après le heurt, le premier officier a vérifié l'état de la salle des machines et a informé le chef mécanicien que le navire avait effectué un accostage dur. Un des matelots de pont au repos et le cuisinier ont été légèrement blessés à la suite du heurt.
1.4 Avaries au navire
La structure de coque avant bâbord du Seaspan Swift a été endommagée aux environs du coqueron-avant, de même que le pont principal et les raidisseurs.
1.5 Dommages à la gare maritime
La rampe de la gare maritime a été emboutie dans le poste d'accostage no 2, et les deux ont été endommagés.
1.6 Certification et expérience du personnel
Le capitaine de relève était titulaire d'un brevet de capitaine au long cours. Il avait obtenu son brevet en 1996. Le capitaine de relève avait occupé les fonctions de capitaine à bord sur divers navires Seaspan depuis 2005, et travaillait normalement sur le Seaspan Reliant, navire-jumeau du Seaspan Swift. Le capitaine de relève avait achevé la formation de familiarisation à bord du Seaspan Swift en octobre 2017. Durant l'intervalle entre sa formation de familiarisation et le jour de l'événement à l'étude, il avait travaillé au total 6 jours à bord du Seaspan Swift. Il avait également suivi une formation sur la gestion des ressources à la passerelle (GRP), en octobre 2000.
Le premier officier était titulaire d'un certificat de capacité de premier officier à proximité du littoral délivré en février 2013. Il était au service de la compagnie depuis 2001 et occupait les fonctions de premier officier depuis avril 2013, principalement à bord d'autres navires de la compagnie. Au moment de l'événement à l'étude, le premier officier n'avait pas suivi de formation sur la GRP.
Le matelot de pont était marin depuis 2013 et titulaire d'un brevet de Matelot de quart délivré en décembre 2016. Il était entré au service de la compagnie en 2016.
Le capitaine habituel était titulaire d'un brevet de capitaine à proximité du littoral et occupait les fonctions de capitaine depuis 2003 à bord de divers navires de la compagnie. Il s'était joint à l'équipage du Seaspan Swift en janvier 2017. Le capitaine habituel avait suivi une formation sur la GRP en avril 2009.
1.7 Certification et inspection du navire
Le Seaspan Swift avait tous les certificats requis pour sa classe de navire et le voyage prévu. Le navire, construit en 2016, avait un certificat de classification délivré le 29 décembre 2016 par Bureau Veritas.
1.8 Conditions environnementales
Les conditions météorologiques au moment de l'événement à l'étude étaient dégagées et offraient une bonne visibilité d'environ 16 milles marins. Les vents étaient du sud-sud-ouest à environ 5 nœuds, et il y avait une houle vers le sud-est d'environ 0,1 m à marée montante. La température de l'air était de 9 °C et celle de l'eau, d'environ 8 °C.
1.9 Commandes d'appareil à gouverner et de propulsion
Le Seaspan Swift et son navire-jumeau, le Seaspan Reliant, ont été conçus à l'origine avec 2 types de commandes manuelles d'appareil à gouverner : une roue de gouvernail (ou barre à roue) et des volants de POD. Les volants de POD, situés de part et d'autre du pupitre central de passerelle (figure 3), permettent d'orienter les POD indépendamment ou de façon synchroniséeNote de bas de page 15. Les POD peuvent pivoter horizontalement sur 360° dans les deux sens. Lorsque la commande d'appareil à gouverner est réglée aux volants de POD, un indicateur étiqueté « AZIMUTH » sur le panneau de commande de propulsion s'allume (figure 4).

1.9.1 Mode port et mode mer
Le navire est muni d'un pilote automatique et de 2 commandes manuelles d'appareil à gouverner (roue de gouvernail et POD). Le pilote automatique et les 2 commandes manuelles d'appareil à gouverner ont 2 modes de fonctionnement : le mode port et le mode mer (figure 5). Le mode mer sert habituellement à faire la transition à la navigation en eaux libres; le mode port sert à manœuvrer le navire dans les eaux resserrées et pour aller à quai. Quand la vitesse d'un navire dépasse 8 nœuds, l'alarme de mode port/mer retentit pour informer le capitaine de l'option de passer en mode mer. Quand on utilise le pilote automatique ou la commande POD pour gouverner en mode mer, l'amplitude du mouvement des POD par rapport à leur axe longitudinal est limitée à ±30°Note de bas de page 16.

Quand la vitesse du navire diminue à moins de 8 nœuds, la même alarme retentit pour informer le capitaine de l'option de passer en mode port. Les POD peuvent pivoter sans restriction quand on utilise le pilote automatique ou la commande POD pour gouverner alors que le navire est en mode port. Cette rotation illimitée des POD en mode port permet également d'effectuer un arrêt en catastrophe. Une alarme sonore intermittente indique l'augmentation ou la réduction de vitesse. L'alarme sonore du mode port/mer est identique à la confirmation sonore de changement de commande de gouverne, de la barre à roue aux volants POD, et vice versa.
La fonction de transfert de mode port/mode mer n'était pas installée à bord du Seaspan Reliant, qui était toujours exploité en mode port. Ainsi, aucune alarme sonore ne retentissait lorsque la vitesse du navire diminuait à moins de 8 nœuds ou augmentait à plus de 8 nœuds.
1.9.2 Barre (roue de gouvernail)
Les autres navires de la flotte de la compagnie qui ont été construits avant le Seaspan Swift et le Seaspan Reliant, par exemple le Seaspan Challenger, le Seaspan Pusher, le Princess Superior et le Seaspan Greg, sont munis de barres à roue classiques.
Les matelots de pont gouvernent les navires selon les ordres du capitaine jusqu'à ce qu'ils approchent de la gare maritime. À ce stade, le capitaine reprend les commandes et manœuvre les navires à quai.
Lors de la conception du Seaspan Swift et du Seaspan Reliant, la compagnie a ajouté des roues de gouvernail à commande électrique à bord des 2 navires. La roue de gouvernail sert à orienter les POD ensemble et limite leur angle à ±45°. On l'utilise habituellement lorsque le navire est en mode mer.
1.9.3 Commutateur de commande de roue de gouvernail
La roue de gouvernail est intégrée de sorte que l'opérateur puisse passer d'un système de gouverne à l'autre; on ne peut utiliser qu'un seul système de gouverne à la fois. Un commutateur muni de voyants lumineux (diodes électroluminescentes [DEL] vertes) (figure 6) a été installé pour permettre de changer la commande, des volants de POD à la roue de gouvernail ou vice versa. La DEL verte de gauche indique l'alimentation de la barre à roue en électricité, tandis que celle de droite indique la sélection de la barre à roue comme méthode de gouverne. La sélection de la barre à roue comme méthode de gouverne empêche les volants des 2 POD de fonctionner. L'opérateur peut toujours manier les volants de POD, mais ils n'auront aucun effet sur les POD. Lorsque l'opérateur change la méthode de gouverne, des volants de POD à la roue de gouvernail ou vice versa, une alarme sonore retentit (un seul « bip ») pour confirmer le changement. Si l'on désélectionne la roue de gouvernail, la méthode de gouverne bascule automatiquement aux volants de POD, et la DEL verte de droite sur le panneau de sélection de la roue de gouvernail s'éteint.

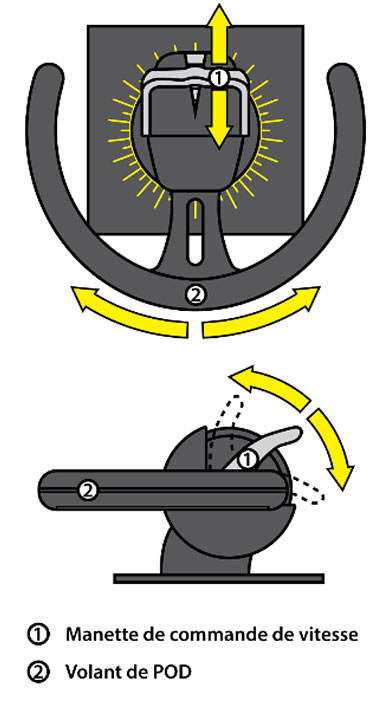
1.9.4 Manettes de commande de vitesse
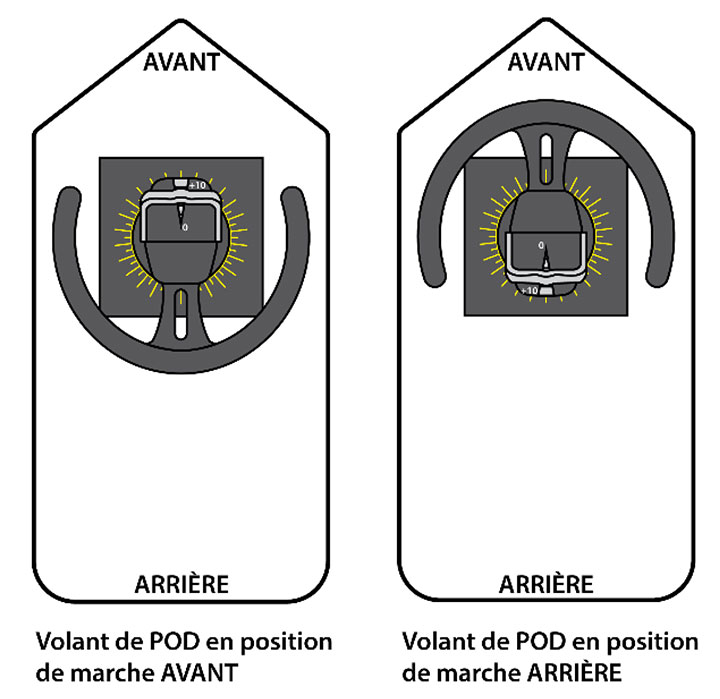
Les volants de POD comprennent des manettes pour augmenter ou diminuer la vitesse des hélices (figure 7 et figure 8). Ces manettes sont unidirectionnelles et peuvent se déplacer uniquement de 0° (situé au centre de la course de la manette) à un maximum de 90° (situé à 1 extrémité de la course de la manette). Les manettes de commande de vitesse sont le seul moyen pour l'opérateur d'augmenter ou de diminuer la propulsion du navire, peu importe s'il gouverne avec la roue de gouvernail ou avec les volants de POD. Les hélices tournent dans 1 sens uniquement.
1.9.5 Indicateurs de commande d'appareil à gouverner et de propulsion
Il y a 4 groupes d'indicateurs à la passerelle pour afficher la direction de la poussée et les tours par minute des POD (figure 9). Deux d'entre eux se trouvent sur le pupitre principal près de chacun des volants de POD, et 2 autres se trouvent au-dessus des fenêtres avant de la passerelle (l'indicateur du POD de bâbord est du côté gauche, et celui de POD de tribord est du côté droit). Les indicateurs de direction de poussée affichent une échelle de rotation non graduée sur 360° et une image d'un POD à 2 hélices; un pointeur triangulaire rouge indique la direction de la poussée du POD (figure 9).

Le pointeur triangulaire rouge mesure 6 mm de haut, et la distance typique, de la position de l'opérateur aux affichages au-dessus des fenêtres avant de la passerelle, est d'environ 210 cm.
La formule pour calculer l'angle visuel (VA) est la suivante : VA (minutes d'arc) = (3438 × hauteur) / distance de l'œil.
À partir de la plus grande distance de visionnement prévue, le VA du pointeur rouge est de 9,8 minutes d'arc. ASTM International, organisme qui élabore des normes techniques, recommande la norme de 16 minutes d'arcNote de bas de page 17. Cette norme est importante pour assurer la lisibilité. Un angle visuel insuffisant qui dépend de la taille de la police de caractère et de la distance rend le pointeur rouge difficile à lire. En outre, depuis la position de l'opérateur, on peine à distinguer s'il indique 0° ou 180°.
1.10 Ergonomie de la passerelle
L'ergonomie de la passerelle concerne la conception et la disposition des commandes et des affichages en vue d'en optimiser l'efficacité et la facilité d'utilisation, tout en réduisant au minimum le risque d'erreur par l'opérateur. Une ergonomie inadéquate à la passerelle peut nuire à la conscience situationnelleNote de bas de page 18 de l'opérateur et, par conséquent, à la navigabilité et à la sécurité du navire. Dans les situations où la charge de travail cognitive est élevée, par exemple durant l'exécution d'une manœuvre d'accostage, surtout lorsque d'autres navires sont présents, l'attention de l'opérateur et sa capacité de traiter l'information sont pratiquement saturées.
Un navire de la taille du Seaspan Swift et de sa classification des voyages doit être conforme aux principes de conception et d'aménagement de l'équipement de navigation énoncés dans le Règlement sur la sécurité de la navigation.Note de bas de page 19 Divers organismes offrent des documents d'orientation sur la conception ergonomique des passerelles de navigation pour informer les concepteurs de navires des principes pertinents et des données utilesNote de bas de page 20,Note de bas de page 21,Note de bas de page 22,Note de bas de page 23,Note de bas de page 24. Ces documents stipulent notamment que les commandes doivent être adjacentes à leurs affichages connexes et situées de sorte que l'information sur les affichages soit facilement lisible durant le maniement des commandes (par exemple, la taille de la police de caractère ou d'un symbole doit être compatible avec la distance de visionnement). Les commandes doivent être conçues de manière à prévenir toute activation accidentelle et doivent fournir des indications visuelles, sonores ou tactiles pour confirmer que le dispositif de commande a bien reçu les signaux d'entrée.
1.11 Enregistreur des données du voyage
L'enregistreur des données du voyage (VDR) enregistre et sauvegarde des renseignements et des paramètres essentiels relatifs aux dernières heures d'un voyage afin de permettre aux autorités pertinentes d'établir plus facilement les causes et les facteurs contributifs d'un événement. Le VDR consigne continuellement les échanges audio sur la passerelle et d'autres données comme l'heure, le cap et la vitesse du navire, les données du compas gyroscopique, les alarmes, les communications par radiotéléphone VHF, les données radar, les données de l'échosondeur, la vitesse et la direction des vents, les ordres transmis à la barre et aux machines, ainsi que les réponses à ces ordres.
Le Seaspan Swift était équipé d'un VDR, conformément à la réglementation. Après l'événement à l'étude, les enquêteurs du BST ont téléchargé les données du VDR. Toutefois, ils ont constaté que ces données étaient partielles – elles ne comprenaient ni les ordres transmis à la barre et aux machines, ni les réponses à ces ordres, ni les alarmes principales, ni la profondeur d'eau. Les données du VDR indiquaient en outre que les alarmes des systèmes électroniques de visualisation des cartes marines étaient désactivées. Les enregistrements audio de la passerelle n'étaient pas clairs, et les microphones VDR à la passerelle n'ont pu capter une partie de la conversation entre les membres d'équipage.
1.12 Système de gestion de la sécurité
La gestion de la sécurité à bord des navires vise avant tout à assurer la sécurité en mer ainsi qu'à éviter les blessures, les pertes de vie et les dommages aux biens et à l'environnement. Une approche documentée et systématique de la gestion de la sécurité contribue à faire en sorte qu'à chaque échelon de l'organisation, les intervenants disposent de l'information et des outils dont ils ont besoin pour prendre des décisions éclairées, en temps normal comme en situation d'urgence. L'un des objectifs du système de gestion de la sécurité (SGS) consiste à évaluer tous les risques cernés qui sont liés aux navires et au personnel d'une compagnie et à l'environnement, ainsi qu'à prendre les mesures de protection appropriées. En outre, les exploitants de navires devraient effectuer des évaluations de sécurité internes pour déterminer l'efficacité du SGS et vérifier si toutes les activités de sécurité et de prévention de la pollution y sont conformes.
Le Seaspan Swift et le Seaspan Reliant étant alimentés au gaz naturel liquéfié, Transports Canada (TC) exige que les deux navires aient un SGS audité et certifié conformément au Code international de gestion de la sécuritéNote de bas de page 25. Le Seaspan Swift et le Seaspan Reliant avaient tous les deux un SMS, comprenant un manuel de gestion de la sécurité (SMM), publié initialement le 31 octobre 2016.
1.12.1 Familiarisation et formation
D'après l'article 6.2 du SMM, tous les membres d'équipage doivent s'être correctement familiarisés à bord d'un navire avant d'effectuer leur premier quart habituel à la passerelle. La compagnie fournit une liste de vérifications accompagnée d'instructions pour faciliter cette familiarisation. Elle prévoit un minimum de 5 jours pour la familiarisation d'un officier. La période de familiarisation peut être moins longue, à la discrétion du capitaine, si l'officier en question a travaillé à bord d'un navire-jumeau.
Les observations suivantes ont été faites sur les documents de formation de familiarisation du capitaine de relève et du premier officier pour ce qui est du Seaspan Swift:
- Capitaine de relève :
- Le capitaine de relève a commencé sa formation de familiarisation à bord du Seaspan Swift le 5 octobre 2017; la date d'achèvement de sa liste de vérifications est le 19 octobre 2017.
- Le 12 octobre, le capitaine habituel a autorisé le capitaine de relève à travailler sur le Seaspan Swift.
- Premier officier :
- Le premier officier a fait sa familiarisation à bord du Seaspan Swift au moyen d'une liste de vérifications datée de juin 2016.
- Le premier officier a suivi une formation de familiarisation à bord du Seaspan Swift en décembre 2016, en janvier 2017 et en février 2017. Ni le formateur ni la personne désignée à terre ou un remplaçant n'ont contresigné sa liste de vérifications, et celle-ci ne comprenait aucun endroit pour indiquer la date à laquelle il a reçu son autorisation.
- Estimant qu'il répondait aux critères minimums requis pour effectuer seul des quarts à la passerelle à bord du Seaspan Swift, le capitaine habituel a donné son autorisation au premier officier.
Les listes de vérifications qu'ont utilisées le capitaine de relève et le premier officier pour leur familiarisation sont des formulaires génériques. Ainsi, elles ne mentionnent ni les commandes manuelles d'appareil à gouverner (c.-à-d. la roue de gouvernail et les volants de POD) ni la marche à suivre pour passer d'une méthode de gouverne à l'autre, procédure propre au Seaspan Swift et au Seaspan Reliant. De plus, elles ne couvrent pas :
- la procédure de transfert entre les volants de POD et la roue de gouvernail;
- les indicateurs de POS/compte-tours;
- le mode port et le mode mer.
1.12.2 Liste de vérifications avant l'arrivée
La compagnie a élaboré une version générique d'une liste de vérifications avant l'arrivée, dont un exemplaire se trouvait à bord du Seaspan Swift (annexe C). Cette liste comprenait une étape qui stipulait le réglage des POD à la propulsion indépendante. Cela exige la transition de la commande d'appareil à gouverner, de la roue de gouvernail aux volants de POD. Toutefois, la liste ne précise pas à quel moment cette transition doit avoir lieu. Le capitaine habituel du Seaspan Swift avait mis au point une méthode selon laquelle il transférait la commande d'appareil à gouverner du navire, de la roue de gouvernail aux volants de POD, à la bouée S28 ou avant celle-ci, lorsque la vitesse du navire diminuait à moins de 8 nœuds. Pour sa part, le capitaine de relève avait l'habitude de transférer la commande d'appareil à gouverner aux volants de POD lorsqu'il considérait que cette transition était nécessaire. La liste de vérifications ne stipulait pas si l'on devait mettre à l'essai d'autres systèmes de gouverne et de propulsion du navire, comme l'application d'une poussée arrière, ni quand on devait le faire.
1.12.3 Gestion des ressources à la passerelle
La gestion des ressources à la passerelle (GRP) consiste en la gestion et l'utilisation efficaces de toutes les ressources, humaines et techniques, qui sont à la disposition de l'équipe à la passerelle afin d'assurer la sécurité du voyage. La GRP comprend les compétences, les connaissances et les stratégies relatives à la communication efficace, à la gestion de la charge de travail, à la résolution de problèmes, à la prise de décisions, au travail d'équipe et à la connaissance de la situation, en particulier durant les opérations cruciales.
La communication efficace est un élément clé de la GRP, car elle aide à établir un modèle mental commun entre les membres de l'équipe à la passerelle. Lorsque les membres de l'équipe à la passerelle s'entendent sur la façon dont se dérouleront les manœuvres, ils peuvent travailler de concert pour accomplir ces manœuvres, cerner les erreurs opérationnelles ou humaines, et intervenir au besoin.
La compagnie avait dressé dans le manuel de gestion de la sécurité (SMM) des listes de tâches pour le capitaine et les officiers ainsi que pour l'équipage, mais n'avait établi aucune procédure ni ligne directrice pour assurer une GRP efficace.
1.13 Recommandations antérieures du BST sur la gestion des ressources à la passerelle
À la suite d'une étude menée en 1995 par le BST, intitulée Étude de sécurité portant sur les rapports de travail entre les capitaines et officiers de quart, et les pilotes de navire, le Bureau avait formulé les 2 recommandations ci-dessous concernant la formation sur la GRP :
le ministère des Transports exige la modification du programme de formation initiale de tous les officiers de navire de façon à inclure un volet sur les compétences en gestion des ressources à la passerelle.Recommandation M95-09 du BST
le ministère des Transports exige que tous les officiers de navire fassent la preuve de leurs compétences en gestion des ressources à la passerelle avant de se voir délivrer des certificats de maintien des compétences.Recommandation M95-10 du BST
En réponse à la recommandation M95-09, TC a révisé sa publication technique TP 4958Note de bas de page 26 en 2016 pour y ajouter les compétences et les connaissances relatives aux officiers de quart décrites dans la Convention internationale sur les normes de formation des gens de mer, de délivrance des brevets et de veille concernant la GRP. Le nouveau programme porte sur la démonstration des compétences (au niveau opérationnel et au niveau de la gestion) acquises durant le cours de navigation électronique simulée (NÉS-O) que doivent suivre les officiers de quart et durant la formation sur l'exercice de l'autorité, le travail en équipe et les compétences de gestion destinée aux capitaines et aux officiers de pont. Une fois que le programme de formation proposé dans la publication TP 4958 sera en vigueur, le plan de cours initial demandera que tous les officiers de navire fassent la preuve de leurs compétences en GRP. Le BST estime que la réponse à cette recommandation dénote une intention satisfaisante.
En réponse à la recommandation M95-10, TC a révisé la publication TP 4958 pour élaborer les nouvelles formations requises sur l'exercice de l'autorité, le travail en équipe et les compétences de gestion qui seront obligatoires pour tous les candidats qui veulent obtenir un nouveau certificat de capacité ou passer à un certificat de capacité de niveau supérieur. Depuis le 1er janvier 2017, TC a une politique selon laquelle les candidats qui veulent obtenir un premier certificat de capacité ou passer à un certificat de compétence de niveau supérieur doivent suivre la formation pertinente sur l'exercice de l'autorité, le travail en équipe et les compétences de gestion.
Toutefois, les candidats qui veulent renouveler leur certificat de capacité (le renouvellement est requis tous les 5 ans) ne seront toujours pas tenus de suivre une formation sur la GRP. Le BST estime que la réponse à cette recommandation est en partie satisfaisante.
1.14 Événements antérieurs
Des événements antérieurs qui ont été signalés au BST au cours des 10 dernières années ont permis de cerner des enjeux relatifs à l'ergonomie de la passerelle et à la GRP.
1.14.1 Ergonomie de la passerelle
M17C0108 – Le 16 juin 2017, le pétrolier Damia Desgagnés, avec 20 personnes à son bord, s'est échoué dans la Voie maritime du Saint-Laurent près de Morrisburg (Ontario), après une perte de propulsion intempestive de la machine principale. La machine principale s'est arrêtée à la suite de l'activation accidentelle du bouton d'arrêt de la machine principale sur l'écran tactile du système intégré de contrôle et surveillance des alarmes de la passerelle.
M16C0005 – Le 22 janvier 2016, le navire porte-conteneurs MSC Monica s'est échoué à 1 mille marin au nord-nord-est de Deschaillons-sur-Saint-Laurent (Québec). Le pilote à bord, qui ne s'était pas familiarisé avec la configuration de la commande de barre non asservie, a involontairement orienté la roue de gouvernail à tribord toute plutôt qu'à bâbord toute. La coque du navire a subi des dommages mineurs et son hélice à 4 pales a été lourdement endommagée. L'enquête a permis de déterminer que si les principes d'ergonomie des appareils embarqués essentiels (dont la commande de gouvernail en mode non asservi) ne sont pas respectés et si ces appareils sont conçus de façon que leur utilisation crée de la confusion ou soit contraire aux attentes, il est possible que des utilisateurs non informés les utilisent incorrectement.
M14C0045 – Le 22 avril 2014, le chimiquier/transporteur de produits Halit Bey remontait le Saint-Laurent sous la conduite d'un pilote, lorsque s'est produite une panne de l'appareil à gouverner. Le navire a dévié à bâbord, a quitté le chenal de navigation, puis s'est échoué sur la rive sud du fleuve en face de Grondines (Québec). La perte de gouverne par la roue de gouvernail a probablement été causée par le déplacement accidentel de la manette de commande du mode non asservi, qui était non protégée, ce qui a déclenché la fonction et l'alarme de surpassement du pilote automatique. L'enquête a permis de déterminer que, si des dispositifs essentiels de la passerelle, par exemple les commandes de l'appareil à gouverner, ne sont pas conçus et disposés de manière à être faciles à utiliser et intuitifs et qu'ils ne sont pas pourvus de protection pour réduire au minimum les erreurs humaines, il est possible qu'un membre de l'équipage soit incapable de réagir rapidement et efficacement en cas d'urgence.
1.14.2 Gestion des ressources à la passerelle
M14C0106 – Le 12 juin 2014, le vraquier autodéchargeur Atlantic Erie s'est échoué à 1,5 mille marin au sud-est des jetées extérieures à Port Colborne (Ontario) après des coupures de l'alimentation électrique du pont. Le capitaine n'utilisait pas toutes les ressources de la passerelle à sa disposition pour surveiller la progression du navire, et celui-ci s'est écarté de la route prévue pendant une quinzaine de 15 minutes. L'incident n'a fait aucun blessé et n'a pas causé de pollution, mais le navire a été endommagé.
M12L0147 – Le 28 novembre 2012, le vraquier Tundra a quitté le chenal de navigation et s'est échoué au large de Sainte-Anne-de-Sorel (Québec). Le pilote et les autres membres de l'équipe à la passerelle n'échangeaient pas de renseignements sur la navigation du navire. Par conséquent, l'équipe à la passerelle n'était pas au courant du changement de cap prévu. L'enquête a permis de déterminer que, si les membres de l'équipe à la passerelle n'ont pas une compréhension complète et commune de l'itinéraire prévu du navire et n'échangent pas continuellement de l'information, cela peut compromettre la capacité de l'équipe à surveiller la marche du navire.
M11N0047 – Le 24 novembre 2011, le navire d'approvisionnement en mer Maersk Detector utilisait un système de positionnement dynamique alors qu'il chargeait la cargaison de l'unité mobile de forage en mer GSF Grand Banks, située dans le champ pétrolifère de White Rose. Au même moment, les conditions météorologiques se sont détériorées, entraînant la formation de houles croissantes en provenance du sud. Le navire n'a pas été en mesure de maintenir sa position, et la poupe côté bâbord du Maersk Detector a heurté la colonne intermédiaire du côté bâbord arrière de la plate-forme de forage GSF Grand Banks, perforant le navire et la plate-forme de forage. Les officiers à la passerelle n'ont pas travaillé en équipe et n'ont pas pleinement tiré parti des données affichées sur les pupitres du système de positionnement dynamique pour maintenir la distance entre le navire et la plate‑forme. Par conséquent, leur conscience d'une collision imminente a été retardée, ce qui les a empêchés de prendre les mesures d'évitement adéquates.
2.0 Analyse
L'enquête a permis de déterminer que le navire avait heurté le poste d'accostage après que le capitaine de relève eut augmenté la poussée alors que le POD de bâbord était orienté dans la direction contraire à celle souhaitée. Le rapport analysera l'ergonomie de la passerelle, la formation de familiarisation, la gestion des ressources à la passerelle (GRP) et le modèle mental qu'avait le capitaine de relève au moment de l'événement.
2.1 Facteurs ayant mené au heurt
Au moment où le Seaspan Swift approchait de la gare maritime pour y accoster, le capitaine de relève coordonnait une entente de croisement avec le Seaspan Reliant, surveillait d'autres navires dans les environs, et vérifiait mentalement que tout l'équipement requis avait été réinitialisé après l'interruption de courant intempestive. Le premier officier a entrepris la liste de vérifications avant l'arrivée avec le capitaine, mais lorsqu'ils ont abordé l'étape du transfert à la commande indépendante, le capitaine de relève n'a pas répondu, car il n'avait pas encore effectué cette étape. La liste de vérifications n'a pas été reprise par la suite, ce qui a mené à une occasion ratée de rappeler au capitaine de relève d'effectuer le transfert de la commande d'appareil à gouverner.
Juste avant d'aller à quai, le capitaine de relève a tourné le volant de POD de bâbord pour déplacer le POD de bâbord en position de marche arrière. Toutefois, comme la commande d'appareil à gouverner était toujours réglée à la roue de gouvernail, le POD n'a eu aucun effet. Le navire faisait toujours marche avant à 3,2 nœuds lorsque le capitaine de relève a déplacé la manette de commande de vitesse pour appliquer la poussée inversée. Cette manœuvre a eu l'effet d'augmenter la vitesse du navire. Attribuant la réponse du navire aux conditions des vents et marées, le capitaine de relève a augmenté encore la poussée, et le navire a accéléré de manière inattendue vers le quai.
Même si le capitaine de relève avait jeté un coup d'œil à l'indicateur de position du POD de bâbord avant d'appliquer la poussée, il a perçu que l'indicateur affichait la direction du POD comme étant de 180° (direction inversée, position de 6 h), alors qu'il était en fait à 0° (direction avant, position de 12 h). Plusieurs facteurs pourraient avoir contribué à cette fausse impression : la petite taille du pointeur triangulaire rouge qui indique la direction de poussée; la forme symétrique du POD aux positions de 0° et de 180°; le réglage à basse intensité de l'éclairement de l'afficheur de direction de poussée; et l'impression qu'avait le capitaine de relève que le POD de bâbord était tourné, puisqu'il venait de tourner le volant.
De plus, la fonction et l'alarme de transfert mode port/mode mer étaient débranchées sur le Seaspan Reliant, et l'indicateur sonore de mode port à bord du Seaspan Swift est identique à l'indicateur sonore de sélection/désélection de la roue de gouvernail comme méthode de gouverne à bord du Seaspan Reliant. Il se peut que cela ait également contribué au fait que le capitaine de relève ne savait pas quel mode de gouverne était sélectionné.
Lorsque le capitaine de relève s'est rendu compte qu'il n'y avait pas eu de transfert de la roue de gouvernail aux volants de POD, il n'avait plus que 21 secondes environ pour tenter un arrêt en catastrophe avant de heurter le poste d'accostage. Le capitaine de relève a transféré la commande d'appareil à gouverner environ 1 seconde plus tard. Il faut 18 secondes aux POD pour renverser leur direction de 0° à 180° (stade auquel le capitaine de relève aurait pu appliquer la pleine poussée arrière pour stopper le navire). Étant donné la proximité du navire au poste d'accostage, l'impulsion avant du navire n'a pu être freinée à temps, et le navire a heurté le poste d'accostage à une vitesse de 4,1 nœuds.
2.2 Ergonomie de la passerelle
Même l'équipe à la passerelle la plus diligente et la plus chevronnée est sujette aux erreurs et omissions qui caractérisent le comportement humain. Voilà pourquoi il est essentiel que les commandes et indicateurs sur la passerelle soient conçus pour prévenir ces erreurs autant que possible. Une bonne conception tient compte de concepts comme la tolérance d'erreur, par laquelle un système est conçu pour réduire au minimum les erreurs potentielles (par exemple en prévoyant des mécanismes de verrouillage ou des couvercles protecteursNote de bas de page 27), ou l'accusé de réception d'entrées, par lequel l'opérateur obtient une réponse qui lui indique que les commandes ont bien transmis un ordre.
2.2.1 Conscience de la commande d'appareil à gouverner
À bord du Seaspan Swift et du Seaspan Reliant, son navire-jumeau, il n'y a aucune alarme sonore pour avertir l'opérateur ou pour l'empêcher de les volants de POD lorsque la commande d'appareil à gouverner est réglée à la roue de gouvernail. Une conception de système qui permet à l'opérateur de déplacer les volants de POD pendant que la commande d'appareil à gouverner est réglée à la roue de gouvernail peut mener à des erreurs de mode.
Lorsque le capitaine de relève a tourné le volant de POD de bâbord, des indices visuels indiquaient le réglage de la commande d'appareil à gouverner à la roue de gouvernail. Le commutateur était réglé à la position de commande par la roue de gouvernail, et les deux DEL vertes au-dessus du commutateur de commande étaient allumés. Le voyant lumineux vert « AZIMUTH », qui indique que la commande d'appareil à gouverner est réglée aux volants de POD, était éteint. Toutefois, le voyant lumineux « AZIMUTH » ne ressortait pas parmi les autres affichages, et il est d'autant moins remarquable lorsqu'il est éteint. Invariablement, lorsqu'un opérateur déplace physiquement une commande, ce geste lui donne l'impression que l'ordre voulu a été transmis, même si ce n'est pas le cas. Par conséquent, l'opérateur pourrait ne pas vérifier attentivement les affichages disponibles pour confirmer la commande transmise à l'appareil à gouverner.
L'étiquette au-dessus du commutateur de commande par la roue de gouvernail n'est pas intuitive. De plus, les deux DEL vertes étaient allumées lorsque la commande d'appareil à gouverner était réglée à la roue de gouvernail. Cela pourrait porter à confusion, étant donné l'emplacement des étiquettes de roue de gouvernail et de POD.
2.2.2 Indicateurs de direction de poussée
Des indicateurs visuels clairs, faciles à lire et positionnés de façon ergonomique facilitent le rôle du navigateur, qui peut confirmer visuellement les entrées de commandes et l'état des dispositifs de la passerelle.
L'indicateur de direction de poussée de bâbord, situé au-dessus des fenêtres de la passerelle du Seaspan Swift, se trouve à environ 210 cm de l'opérateur, et la hauteur du pointeur triangulaire rouge n'est que de 6 mm. L'angle visuel du pointeur rouge à partir de la plus longue distance de visionnement prévue est de 9,8 minutes d'arc, soit considérablement moins que la norme recommandée de 16 minutes. Un angle visuel insuffisant qui dépend de la taille de la police de caractère et de la distance rend le pointeur rouge difficile à lire à partir de la position de l'opérateur, et l'on peine à distinguer s'il indique 0° ou 180°. De plus, le pointeur triangulaire rouge ne s'étend pas jusqu'au centre de l'échelle, ce qui améliorerait sa lisibilité.
2.2.3 Activation accidentelle des commutateurs
L'absence de dispositifs de sécurité sur les commutateurs engendre la possibilité de leur activation accidentelle. Les conséquences d'un tel geste peuvent aller de la confusion ou de la distraction de l'équipe à la passerelle, comme dans l'événement à l'étude, à l'arrêt d'un système essentiel. Des caractéristiques de conception visant à prévenir l'activation accidentelle d'un commutateur peuvent comprendre des dispositifs de verrouillage ou des couverclesNote de bas de page 28.
Dans l'événement à l'étude, la panne de courant accidentelle causée par le contact entre le genou d'un membre d'équipage et le commutateur découvert sur le panneau latéral a semé de la confusion et de la distraction sur la passerelle.
Si les commutateurs sur la passerelle ne sont pas conçus de façon optimale, il y a risque d'activation accidentelle, ce qui pourrait mener à un accident.
2.3 Formation de familiarisation
Les listes de vérifications qui ont servi à la formation de familiarisation du capitaine de relève et du premier officier à bord du Seaspan Swift étaient des modèles génériques dont étaient équipés tous les navires de la compagnie. Par conséquent, ces listes ne mentionnaient pas précisément les commandes d'appareil à gouverner du navire (roue de gouvernail/volants de POD) ni la procédure de transfert entre ces deux méthodes de gouverne. L'enquête n'a pas permis de déterminer si la formation de familiarisation du capitaine de relève et du premier officier avait contribué à l'événement à l'étude. Or, cette formation utilise des listes de vérifications génériques qui n'offrent aucun renseignement sur la configuration de gouverne distincte de ce navire, différente de celle de tous les autres navires de la flotte, en plus d'autres problèmes relatifs à ces listes mentionnés ci-dessus, ce qui laisse croire à des lacunes dans la documentation du système de gestion de la sécurité.
2.3.1 Gestion des ressources à la passerelle
Pour qu'une GRP soit efficace, les membres de l'équipe à la passerelle doivent échanger de l'information afin de s'assurer que tous s'entendent sur les étapes successives d'un voyage, y compris l'accostage. Lorsqu'ils s'entendent ainsi, les membres de l'équipe à la passerelle peuvent seconder le navigateur principal et ainsi cerner les erreurs ou les incohérences. Les instructions d'approche, l'exécution en équipe des listes de vérifications, tout comme les annonces des étapes à mesure qu'elles sont achevées, peuvent faciliter l'échange d'information et tenir toute l'équipe à la passerelle au courant de la progression du navire.
À l'heure actuelle, Transports Canada n'exige pas que tous les membres d'équipe à la passerelle suivent une formation sur la GRP. D'après la réglementation en vigueur, seuls les officiers qui obtiennent un nouveau certificat de capacité ou un certificat de capacité de niveau supérieur doivent suivre une formation sur la GRP. Les officiers qui renouvellent leur certificat de capacité (le renouvellement est requis tous les 5 ans) ne sont pas tenus de suivre une formation sur la GRP. Par conséquent, dans l'événement à l'étude, le premier officier n'était pas tenu de suivre une formation sur la GRP et il ne l'avait pas fait.
Dans l'événement à l'étude, certaines lacunes dans la GRP et relativement aux outils à la disposition de l'équipe à la passerelle ont réduit sa capacité de cerner les erreurs ou les incohérences durant l'approche en vue d'accoster :
- La liste de vérifications avant l'arrivée n'était pas propre au navire et ne stipulait pas quand doivent avoir lieu le transfert et l'essai de la commande d'appareil à gouverner.
- Le premier officier veillait aux travaux de ballastage pendant que le navire approchait du poste d'accostage; il n'a pu surveiller de près les activités du capitaine de relève.
- Le capitaine de relève et le premier officier ont entrepris la liste de vérifications avant l'arrivée, le premier officier annonçant les éléments de la liste. Le capitaine de relève n'a pas répondu à toutes les annonces durant ce processus, notamment à celle concernant la commande indépendante des POD. Ni le capitaine de relève ni le premier officier n'a repris la liste de vérifications par la suite.
Il est important que les équipes à la passerelle utilisent tous les outils et toutes les mesures à leur disposition pour s'assurer de l'arrivée sécuritaire d'un navire. Cela comprend l'échange d'information afin que tout le personnel à la passerelle comprenne le déroulement des manœuvres; poser des questions pour clarifier les procédures ou décisions ambiguës; achever les listes de vérifications en annonçant et en confirmant chaque élément; et surveiller les actions du navigateur principal afin de cerner les erreurs ou les incohérences. Les équipes qui travaillent régulièrement ensemble ont tendance à développer une compréhension commune et à bien connaître les méthodes de chacun. Cependant, il est tout particulièrement important de maintenir de bonnes habitudes relatives à la GRP lorsque du personnel nouveau ou de relève se trouve à bord.
Lorsque tous les membres de l'équipe à la passerelle suivent une formation sur la GRP, ils comprennent mieux ces concepts et améliorent leur capacité à communiquer et à travailler efficacement pour assurer la navigation sécuritaire du navire. Dans l'événement à l'étude, 2 des 3 membres de l'équipe à la passerelle avaient suivi une formation sur la GRP.
Si tous les membres de l'équipe à la passerelle ne sont pas tenus de suivre une formation sur la GRP, ou si les membres de l'équipe à la passerelle ne se conforment pas aux principes essentiels de la GRP, ils risquent de ne pas communiquer ni travailler efficacement en équipe, ce qui augmente les risques d'accident.
2.4 Enregistreur des données du voyage
Un enregistreur des données du voyage (VDR) a pour objet de créer et de tenir un registre sécurisé et récupérable des renseignements qui indiquent la position, le mouvement, l'état physique et le contrôle d'un navire. Les données objectives sont inestimables pour les enquêteurs qui cherchent à comprendre la chronologie des faits et à cerner les problèmes opérationnels et les facteurs humains.
Dans l'événement à l'étude, le Seaspan Swift était équipé d'un VDR, conformément à la réglementation. Or, les renseignements récupérés à partir du VDR n'étaient pas complets. Par conséquent, les enquêteurs du BST n'ont pu accéder aux renseignements consignés sur les tours par minute, la position ou le mouvement des POD au cours des derniers instants avant que le navire heurte le poste d'accostage. Ces renseignements auraient été cruciaux pour vérifier la position des POD à tout moment par rapport aux actions de l'opérateur. De plus, le VDR n'a pas enregistré les alarmes principales, et les enregistrements audio de la passerelle que les enquêteurs du BST ont téléchargés n'étaient pas clairs, probablement à cause de la position des microphones sur la passerelle. Sans ce type de renseignement, les enquêteurs peuvent difficilement confirmer le déroulement de l'événement et la chronologie des faits.
Si les renseignements d'un VDR ne sont pas disponibles pour une enquête, cela pourrait prévenir la détermination et la communication de lacunes de sécurité qui permettraient d'améliorer la sécurité dans les transports.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
- Au moment où le Seaspan Swift approchait de la gare maritime pour y accoster, le capitaine de relève et le premier officier ont entrepris la liste de vérifications avant l'arrivée, mais l'ont interrompue à l'étape du réglage des POD en mode de propulsion indépendante. Ils n'ont pas repris la liste de vérification par la suite, ce qui a mené à une occasion ratée au capitaine de relève d'effectuer le transfert de la commande d'appareil à gouverner.
- Comme la commande d'appareil à gouverner était toujours réglée à la roue de gouvernail au moment où le capitaine a tourné le volant de POD, le POD n'a eu aucun effet et a continué sa poussée vers l'avant.
- Le capitaine de relève a déplacé la manette de commande de vitesse pour appliquer la poussée inversée, mais cette manœuvre n'a fait qu'augmenter la vitesse du navire. Attribuant la réponse du navire aux conditions des vents et marées, le capitaine de relève a augmenté encore la poussée, et le navire a accéléré de manière inattendue vers le quai.
- Lorsque le capitaine de relève s'est rendu compte qu'il n'y avait pas eu de transfert de la roue de gouvernail aux volants de POD, le navire était trop près du poste d'accostage pour effectuer un arrêt en catastrophe et il a heurté le poste d'accostage à une vitesse de 4,1 nœuds.
3.2 Faits établis quant aux risques
- Si les commutateurs sur la passerelle ne sont pas conçus de façon optimale, il y a risque d'activation accidentelle, ce qui pourrait mener à un accident.
- Si tous les membres de l'équipe à la passerelle ne sont pas tenus de suivre une formation sur la gestion des ressources à la passerelle, ou si les membres de l'équipe à la passerelle ne se conforment pas aux principes essentiels de la gestion des ressources à la passerelle, ils risquent de ne pas communiquer ni travailler efficacement en équipe, ce qui augmente les risques d'accident.
- Si les renseignements d'un enregistreur des données du voyage ne sont pas disponibles pour une enquête, cela pourrait prévenir la détermination et la communication de lacunes de sécurité qui permettraient d'améliorer la sécurité dans les transports.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Seaspan Ferries Corporation
À la suite de l'événement à l'étude, Seaspan Ferries Corporation a pris les mesures suivantes :
- La connexion desserrée du commutateur 120 V qui a déclenché l'interruption momentanée de l'alimentation des écrans radars a été réparée, et un dispositif de protection a été installé sur le commutateur. La compagnie a également affiché une liste des dispositifs qu'alimente ce commutateur.
- On a dressé des listes de vérifications avant l'arrivée propre à chaque gare maritime (Tilbury, Swartz Bay et Duke Point), et révisé les étapes pour qu'elles comprennent des détails précis sur le moment de régler la commande d'appareil à gouverner aux volants de POD (annexe D).
- La compagnie a sollicité les opinions des employés relativement à la liste de vérifications avant l'arrivée, notamment sur les changements importants qui influent sur l'exploitation de la flotte.
- À bord du Seaspan Swift comme du Seaspan Reliant, on a remplacé les indicateurs de direction de poussée par des modèles à la représentation simplifiée des propulseurs, de manière à clarifier la direction de la poussée.
- On a modifié la conception du système de commande d'appareil à gouverner de manière à ce que, lorsque la commande est réglée à la roue de gouvernail, les volants de POD doivent être réglés en position de poussée vers l'avant. Si la position des volants change, une alarme retentit. Ce concept a été présenté à la société de classification du navire et approuvé par celle-ci, et il a été installé par le fabricant d'équipement d'origine.
- Une enquête a été lancée pour déterminer pourquoi l'enregistreur des données du voyage du navire n'avait pas consigné certains renseignements.
Le présent rapport conclut l'enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le 28 novembre 2018. Le rapport a été officiellement publié le 17 janvier 2019.
Annexes
Annexe A – Propulseurs omnidirectionnels (POD)

Annexe B – Lieu de l’événement