Accident d’amarrage
Traversier roulier Madeleine II
Cap-aux-Meules (Québec)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 9 janvier 2022, le premier officier du traversier roulier Madeleine II a été mortellement blessé au cours d’un accident d’amarrage tandis que le navire accostait au quai no 2 du port de Cap-aux-Meules (Québec). Le navire n’a subi aucun dommage et aucune pollution n’a été signalée.
1.0 Renseignements de base
1.1 Fiche technique du navire
| Nom du navire | Madeleine II |
|---|---|
| Numéro de l’Organisation maritime internationale | 9430105 |
| Numéro officiel | 844246 |
| Port d’immatriculation | Ottawa (Ontario) |
| Pavillon | Canada |
| Type | Traversier roulier |
| Jauge brute | 15 875 |
| Longueur hors tout | 139,1 m |
| Tirant d’eau | 5,9 m |
| Construction | 2019, Factorías Vulcano, S.A., Vigo (Pontevedra, Espagne) |
| Propulsion | 2 moteurs diesels à 8 cylindres à 4 temps (20 000 kW au total) entraînant 2 hélices à pas variable |
| Capacité maximale sur certificat | 1406 personnes (1375 passagers + 31 membres d’équipage) |
| Propriétaire au registre et représentant autorisé | Ministre des Transports |
| Gestionnaire technique et opérateur | C.T.M.A. Traversier Ltée. |
| Organisme reconnu et Autorité de délivrance de la certification internationale de gestion de la sécurité | Lloyd’s Register |
1.1 Description du navire
Le Madeleine II est un traversier roulier en acier (figure 1) ayant 10 ponts, dont 3 ponts-garages pour les véhicules. L’accès au pont-garage no 3 se fait à l’avant et à l’arrière par des portes et des rampes.

La passerelle, qui comprend tous les équipements requis de navigation et de communication, est située à l’avant.
Le navire est propulsé par 2 moteurs diesels à 8 cylindres à 4 temps, d’une puissance combinée maximale continue de 20 000 kW à un régime de 600 tours/minute, lesquels entraînent des hélices à pas variable. Le Madeleine II est doté de 2 propulseurs d’étrave d’une puissance de 1000 kW chacun. Sa direction est assurée par 2 gouvernails de type BeckerNote de bas de page 1 offrant un angle maximal de gouvernail de 60 degrés.
Le navire possède 2 postes d’amarrage, 1 situé à l’avant des emménagements sur le pont gaillard et 1 situé à la poupe sur le pont 5. Ces postes d’amarrage comprennent chacun 3 treuils du modèle CH-3715 du fabricant Carral Marine Technology. Deux des treuils du poste d’amarrage avant sont équipés en plus d’un guindeau.
Les amarres du Madeleine II sont faites de cordages en mélange de polymères à 6 torons de 56 mm avec une force de rupture minimale certifiée de 73 tonnes métriquesNote de bas de page 2. Au moment de l’événement à l’étude, les 2 câbles utilisés comme gardes montantes de l’arrière étaient en bon état et ne présentaient aucun défaut apparent.
1.2.1 Poste d’amarrage arrière
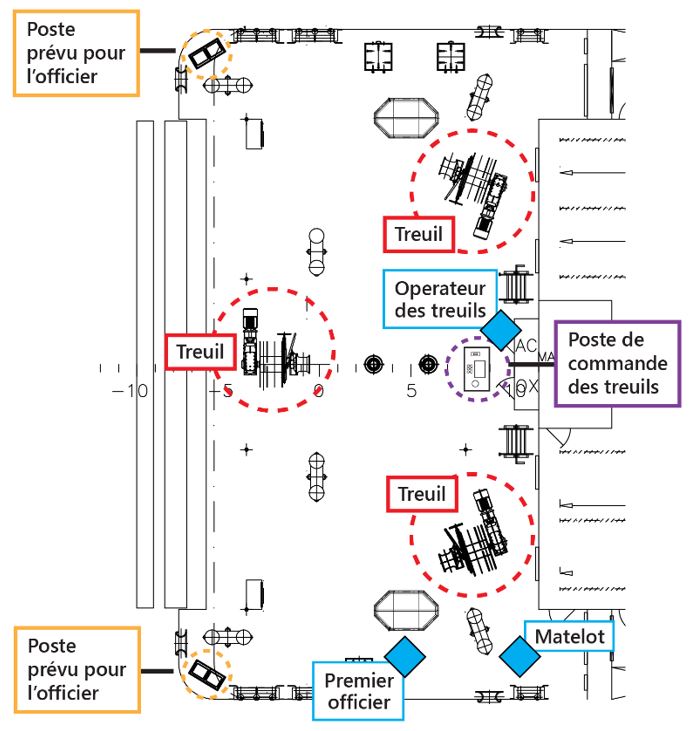
Le poste d’amarrage arrière (figure 2), entièrement recouvert par un toit en acier, comprend 2 treuils installés de chaque côté du navire et un 3e installé au centre du pont près du pavois arrière. Le poste de commande des treuils se trouve au centre, près des emménagements. Deux postes surélevés et protégés par des parois en acier, un de chaque côté du navire à l’arrière, sont prévus pour l’officier responsable.
1.3 La Coopérative de Transport Maritime et Aérien
La Coopérative de Transport Maritime et Aérien (CTMA) est une entreprise de transport créée en 1944 pour relier les îles de la Madeleine (Québec) au reste du Canada. Le service de traversier est essentiel à la communauté des îles de la Madeleine, autant du point de vue de la sécurité civile que du ravitaillement. La CTMA est dirigée au nom des membres par le conseil d’administration, avec le président à la tête. Le siège social de la CTMA est situé à Cap-aux-Meules, aux îles de la Madeleine.
Dans le domaine maritime, outre le transport des marchandises, la CTMA assure le service de traversier entre Cap-aux-Meules et Souris (Île-du-Prince-Édouard). Selon la saison, le traversier effectue plusieurs voyages par semaine entre ces 2 ports.
1.3.1 Acquisition du Villa de Teror
En février 2021, le gouvernement canadien a fait l’acquisition du traversier Villa de Teror afin de remplacer le traversier Madeleine, qui était arrivé en fin de vie. Lors de l’acquisition du Villa de Teror, le futur équipage et quelques employés supplémentaires de la CTMA ont été envoyés en Espagne, où le navire venait d’être mis en service, afin de se familiariser avec le navire. Le navire a été livré au Canada à la fin du mois de mars 2021 et est entré en service le 1er juin 2021 sous le nom de Madeleine II.
Le Madeleine II mesure 139,1 m comparativement au Madeleine qui mesurait 116,24 m.
1.4 L’infrastructure du port
1.4.1 Description
Les installations portuaires du port de Cap-aux-Meules, port commercial principal des îles de la Madeleine, sont sous l’autorité du gouvernement fédéral. Depuis les années 1970, ces installations sont utilisées par divers types de navires commerciaux, y compris des traversiers, des navires à passagers, des pétroliers, et d’autres types de navires de charge.
Les installations comportent plusieurs quais, dont un spécialement aménagé pour le service de traversier. Le quai du traversier est pourvu d’une rampe d’accès pour le chargement et le déchargement de véhicules. Au moment de l’accident, ce quai était inutilisable en raison de travaux de mise à niveau exécutés sous la responsabilité du gouvernement fédéral pour accueillir le Madeleine II.
Les quais no 1 et no 2 sont conçus pour accueillir des navires commerciaux. Le quai no 2 est muni d’une rampe d’accès et a une longueur d’environ 82 m, alors que la longueur hors-tout du traversier est de 139,1 m.
Au moment de l’accident, puisqu’il n’y avait aucune autre infrastructure portuaire commerciale appropriée, il n’y avait pas d’autre choix que d’utiliser temporairement le quai no 2 pour assurer le service de traversier. Lorsqu’il était amarré au quai no 2, approximativement 57 m de l’avant du Madeleine II se trouvaient en saillie par rapport au quai. Pour cette raison, aucune amarre de bout avant ne pouvait être déployée et seulement des gardes montantes arrière pouvaient empêcher le navire de reculer.
Tous les travaux de réfection d’une valeur de plus d’un million de dollars que Transports Canada (TC) veut faire effectuer sur les quais doivent passer par le processus complet du Navigateur de projet Note de bas de page 3 de Services publics et Approvisionnements Canada (SPAC). Le processus de soumission pour les travaux est complexe, ce qui peut causer des délais pour les mises en chantier. La pandémie de la COVID-19 a aussi ralenti les travaux de mise à niveau du quai du traversier.
1.4.2 Études sur l’état des bollards
En novembre 2018, alors que le CTMA Vacancier était amarré au quai no 2 à Cap-aux-Meules, le bollard d’amarrage B80 s’est rompu sous la tension de l’amarre Note de bas de page 4. Le bollard d’amarrage B80 a été remplacé, en utilisant l’ancrage existant, par un autre bollard du quai no 2 ayant la même capacité. Suite à cet incident, une étude technique sur l’incident a été réalisée par une firme d’ingénierie et a permis de déterminer que la rupture du bollard avait probablement été causée par la surcharge sur le bollard; selon le dessin du manufacturier, le bollard B80 avait une capacité de 25 tonnes. Étant donné les conditions environnementales et les dimensions du navire, les forces agissant sur le bollard ont dépassé sa charge maximale d’utilisation.
À la suite du bris du bollard B80 en 2018 et en prévision de l’arrivée du Madeleine II en 2021, les bollards des installations portuaires à Cap-aux-Meules ont fait l’objet d’études.
En avril et novembre 2020, à cause de la détérioration des bollards, l’inspection des 68 bollards d’amarrage des quais no 2 à no 8 du port de Cap-Aux-Meules a été effectuée par une autre firme d’ingénierie. Le mandat incluait l’évaluation de la capacité résiduelle des bollards. Malgré la capacité de conception des bollards, qui était de 25 tonnes, au terme de l’étude, on a recommandé de diminuer la capacité de certains bollards. Le bollard B80 a vu sa capacité diminuée à 10 tonnes et le bollard B81 à 20 tonnes. Le remplacement complet des bollards B80 et B81 ainsi que leur ancrage a été recommandé à TC.
En novembre 2020, après que les bollards B78 et B80 eurent montré des signes de mouvement, une inspection complémentaire des 2 bollards a été réalisée, et la mise hors service immédiate du bollard B80 a été recommandée et effectuée.
1.4.3 Travaux sur le quai du traversier et le quai no 2
1.4.3.1 Travaux sur le quai du traversier
Il y a 2 projets de modernisation du quai du traversier pour accueillir le Madeleine II. Les travaux du quai sont gérés par SPAC pour le compte de TC.
Le 1er projet a commencé au début de l’été 2021 et vise le remplacement de la rampe d’accès des véhicules par une autre adaptée à la capacité de la rampe du Madeleine II.
Le 2e projet a commencé au début de l’hiver 2022 et comprend les travaux suivants : la construction d’un nouveau duc-d’Albe, le renforcement de la structure du quai, ainsi que le remplacement et la mise à niveau des bollards d’amarrage et des défenses existantes.
Le bureau de TC de la région de l’Atlantique à Dartmouth (Nouvelle-Écosse) est responsable de ces projets.
Les travaux de ces 2 projets sont réalisés par la même entreprise de construction du Nouveau-Brunswick. La fin des travaux du 1er projet était prévue pour l’automne 2021 et celle du 2e projet pour mai 2022. Les travaux n’ont pas avancé comme prévu et pour cette raison, la fin de tous les travaux a été reportée. Toutefois, le Madeleine II a pu retourner au quai du traversier en novembre 2023.
SPAC a un contrat d’inspection sur place pour la durée des projets afin de surveiller tous les aspects des travaux.
1.4.3.2 Travaux sur le quai no 2
Le bureau de TC de la région du Québec est responsable des autres installations portuaires de Cap-aux-Meules. À la suite de la mise hors service du bollard B80 en novembre 2020, SPAC et TC ont procédé à la planification des travaux de remplacement du bollard B80 par un bollard d’amarrage de 25 tonnes. Alors que la planification était pratiquement terminée, SPAC et TC ont été informés que la fondation du bollard B80 était devenue instable. Par conséquent, la planification des travaux a dû être révisée.
De son côté, la CTMA, en prévision de l’entrée en service du Madeleine II et afin d’accélérer les travaux, a demandé au gouvernement fédéral de l’autoriser à prendre en charge certaines responsabilités du projet, comme le remplacement des bollards B80 et B100 par des bollards d’amarrage de 75 tonnes. À la suite de cette demande, le 10 décembre 2021, TC a autorisé la CTMA et ses sous-traitants à s’occuper du remplacement de ces 2 bollards d’amarrage. Une entreprise locale a réalisé les travaux sous la supervision de la CTMA. Les travaux ont commencé le 3 janvier 2022 et ont été achevés en avril 2022.
1.5 Déroulement du voyage
Le 9 janvier 2022 à 6 h 20Note de bas de page 5, le Madeleine II a quitté Souris avec 41 membres d’équipage et 71 passagers à son bord pour son voyage de retour à Cap-aux-Meules.
À environ 5 milles marins au large du port de Cap-aux-Meules, les membres d’équipage ont été avertis du plan d’amarrage prévu et de se préparer pour l’accostage du traversier.
À 10 h 34, le navire est entré dans le port (figure 3) et sa vitesse a été réduite à 4,1 nœuds. Les équipes d’amarrage avant et arrière se sont rendues à leurs postes respectifs. Le troisième officier était responsable du poste d’amarrage avant avec le maître d’équipage aux commandes des treuils, en plus de 2 matelots et de 1 cadet de pont pour s’occuper des amarres. Le premier officier était responsable du poste d’amarrage arrière avec l’aide d’un opérateur des treuilsNote de bas de page 6, ainsi que d’un 2e matelot de pont pour manipuler les amarres. Le second officier était au poste des commandes de la rampe de chargement des véhicules à la poupe du pont 3. Le premier officier, le second officier, et le troisième officier communiquaient avec le capitaine à l’aide de radiotéléphones portatifs à ultra-haute fréquence (UHF). Le capitaine a informé les équipes d’amarrage que l’amarre de travers en avant et 2 gardes montantes en arrière seraient déployées en premier.

Pendant ce temps, à terre, une équipe de 6 préposés aux amarres se rendait sur le quai no 2. Trois préposés de cette équipe étaient responsables d’attraper les amarres arrière et de les placer sur les bollards d’amarrage conformément aux ordres du capitaine transmis par radiotéléphone. Les 3 autres s’occupaient des amarres avant.
Vers 10 h 39, le navire avait terminé son cercle de giration et le capitaine a commencé l’approche finale du navire vers le quai no 2, avec son côté tribord parallèle au quai et la poupe dirigée vers la rampe d’accès. Le navire reculait à une vitesse réduite de 1,5 nœud. Le premier officier a informé le capitaine lorsque l’arrière du navire est passé par le travers du coin du quai.
À 10 h 43, le matelot responsable des amarres arrière a déployé la 1re garde montante à travers le chaumard à rouleaux de la hanche tribord. La 1re garde montante était déroulée à partir du treuil, qui était utilisé en mode manuel, à mesure que le navire reculait. Les préposés aux amarres sur le quai ont ramassé et placé l’œil de la garde montante sur le bollard d’amarrage B81. Le capitaine en a été informé par le premier officier. Le premier officier a ensuite déployé la 2e garde montante qui avait été préalablement placée sur le pont. Les préposés aux amarres sur le quai l’ont ramassée et ont commencé à la tirer pour aller la placer sur le même bollard d’amarrage que la 1re garde montante.
Vers 10 h 44, la 1re garde montante a commencé à se tendre. Une 1re alarme sur le contrôle du treuil s’est déclenchée. Rapidement, une 2e alarme s’est déclenchée et le treuil a arrêté de fonctionner. L’opérateur du treuil a tenté de réinitialiser l’alarme sur l’écran tactile afin de reprendre le contrôle du treuil et ainsi relâcher la garde montante. L’opérateur du treuil a voulu avertir le premier officier de la situation, mais il avait momentanément perdu le contact visuel avec le premier officier et l’autre matelot. Le premier officier s’était penché et n’était plus visible derrière le tambour du treuil. Lorsque le matelot qui était responsable de la manipulation des amarres a vu la tension qui montait sur la 1re garde montante, il s’est éloigné du pavois pour se protéger derrière le coin de la superstructure.
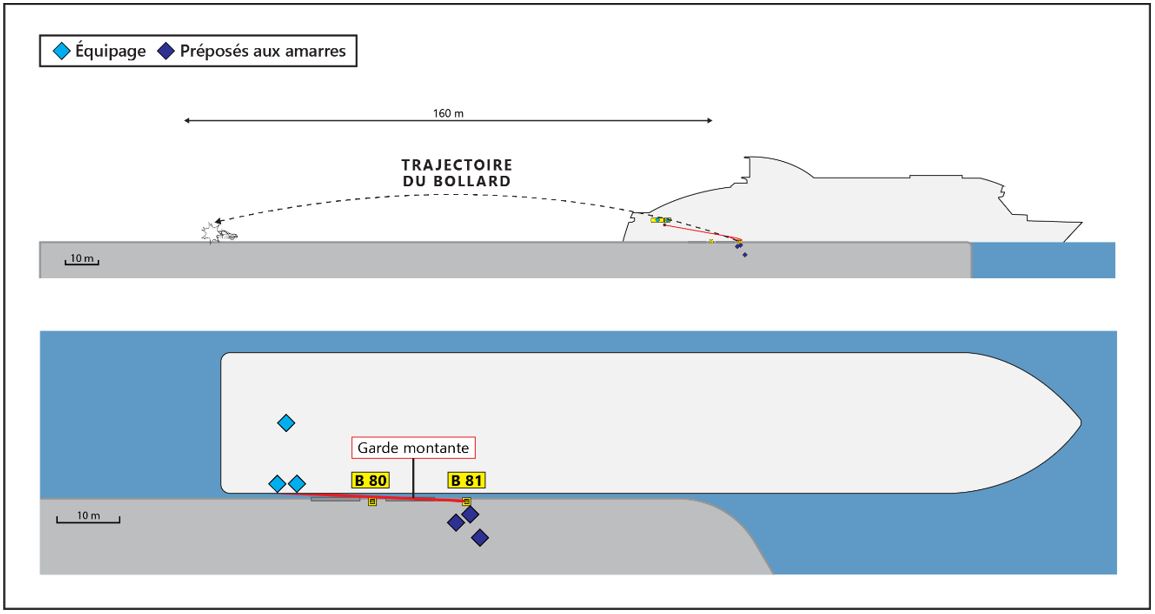
Les préposés aux amarres sur le quai s’apprêtaient à placer la 2e garde montante sur le bollard B81. Quelques secondes plus tard, le premier officier s’est redressé au-dessus du pavois. À cet instant, le bollard d’amarrage s’est rompu et la 1re garde montante s’est libérée brusquement dans un mouvement de fouet vers le haut. La 1re garde montante est montée bien au-dessus du pavois du pont 5 et a heurté le premier officier. Le premier officier, qui ne portait pas de casque de sécurité, a été atteint à la tête et est tombé inconscient sur le coup. Une partie du bollard a été projetée à près de 160 m vers l’arrière du quai en direction du stationnement, où elle a heurté un camion et s’est immobilisée quelques mètres du camion (figure 4).
Le matelot responsable de manipuler les amarres a informé le capitaine de l’accident. Le capitaine a remis le transmetteur d’ordres des pas de l’hélice en position avant toute afin d’immobiliser le navire. À ce moment, le Madeleine II reculait à une vitesse d’environ 1,0 nœud. Quelques instants plus tard, le capitaine a ordonné au second officier de monter sur le pont 5 afin de vérifier la situation et prendre en charge les opérations sur le poste d’amarrage arrière.
À 10 h 45, le navire a touché la rampe d’accès du quai et s’est immobilisé. La 2e garde montante, qui était placée sur le pont, avait glissé à l’eau et s’était enroulée autour de l’hélice tribord du navireNote de bas de page 7. L’opérateur du treuil a voulu remonter la 1re garde montante, mais celle-ci ne s’enroulait pas dans le bon sens sur le tambour.
Le capitaine a pris la décision d’aller accoster le navire au quai no 1. De plus, il a contacté les services d’urgence, la direction de la compagnie, et le trafic maritime pour les informer de l’accident.
Simultanément, les membres d’équipage ont prodigué les premiers soins au premier officier inconscient, incluant les manœuvres de réanimation cardiorespiratoire. Ils ont été rejoints par un médecin qui se trouvait parmi les passagers. Un peu plus tard, ce médecin a constaté la mort du premier officier.
Entre 10 h 50 et 10 h 53 alors que le navire se déplaçait vers le quai no 1, des ambulanciers paramédicaux et la police sont arrivés sur les lieux.
Vers 11 h 30, après que le Madeleine II eut été amarré au quai no 1 et qu’une passerelle eut été installée, les ambulanciers, la Sûreté du Québec, le directeur des opérations de la CTMA, l’autre premier officier du navire, le commissaire de bord, et l’équipe psychosociale du Centre intégré de santé et de services sociaux des îles de la Madeleine sont montés à bord.
Vers 12 h 45, quand une partie du travail effectué par la Sûreté du Québec a été complétée, le navire est retourné en direction du quai no 2.
Vers 13 h 25, avec l’aide de 2 remorqueurs, le Madeleine II a été amarré au quai no 2 et l’équipage a procédé au débarquement des passagers et des véhicules.
1.6 Conditions météorologiques
Au moment de l’événement, le vent soufflait à 15 nœuds du sud-sud-ouest. La température de l’air était de −1 °C. Le ciel était couvert et la visibilité était de 10 milles marins.
1.7 Certificats du navire
Le Madeleine II était équipé et certifié pour sa classe de navire et le voyage prévu. La plus récente inspection périodique (annuelle) avait été effectuée le 19 mai 2021 par Lloyd’s Register, l’organisme reconnu.
1.8 Certification et expérience du personnel
Le capitaine détenait un brevet de capitaine, à proximité du littoral. Il s’est joint à la CTMA en juillet 1981 en tant que matelot et en 1992, il a commencé à occuper différents postes d’officier de pont. En 1995, il a été promu au grade de capitaine et a travaillé sur plusieurs navires de la CTMA. En mars 2021, il a pris le commandement du Madeleine II.
Le premier officier détenait un brevet de premier officier de pont, à proximité du littoral, délivré en mai 2019. Il s’est joint à la CTMA en février 2017 à titre de timonier et été promu au grade d’officier de pont quelques semaines plus tard. En avril 2018, il est devenu premier officier de relève. En octobre 2019, il a obtenu un poste permanent au sein de la CTMA et a agi comme premier officier de relève sur le Madeleine II et le CTMA Voyageur 2.
Le second officier détenait un brevet de premier officier de pont, à proximité du littoral, délivré en janvier 2020. Il s’est joint à la CTMA en 2018 en tant qu’officier de pont après avoir terminé ses études en navigation.
Le matelot qui manœuvrait les treuils d’amarrage arrière a commencé à naviguer en 2010 comme cuisinier. Il s’est joint à la CTMA en 2014 en tant que cuisinier. En 2020, il a commencé à travailler comme matelot sur les navires de la CTMA, puis sur le Madeleine II depuis son acquisition en 2021.
Le matelot de pont qui manipulait les amarres à l’arrière a commencé à naviguer en 1992 sur des bateaux de pêche. Il s’est joint à la CTMA en 2015 en tant que matelot de pont. Il a commencé à travailler sur le Madeleine II lors de son acquisition en 2021.
1.9 Sécurité lors des opérations d’amarrage
1.9.1 Dangers liés aux opérations d’amarrage
Les principaux dangers que les opérations d’amarrage présentent pour le personnel sont les suivants :
- le coup de fouet (snap-back) quand une amarre sous tension se brise ou se dégage d’un obstacle quelconqueNote de bas de page 8;
- le fait de se coincer les pieds ou les mains dans les amarres ou entre les amarres et les points d’amarrageNote de bas de page 9;
- les chutesNote de bas de page 10.
Plusieurs facteurs peuvent augmenter les risques d’accident pendant les opérations d’amarrage, entre autres des amarres ou de l’équipement en mauvais état, un poste d’amarrage encombré par des cordages ou de l’équipement inutiles, des amarres déroulées directement à partir du treuil, une amarre qui s’emmêle sur le tambour du treuil d’amarrage, et des opérations d’amarrage inadéquatement supervisées, comme lorsqu’un superviseur participe à d’autres tâches pendant les opérations d’amarrageNote de bas de page 11.
De plus, il est courant d’utiliser les amarres à partir des treuils pendant la phase dynamique d’un amarrage. Cependant, plusieurs enquêtes du BSTNote de bas de page 12 ont démontré que cette façon de faire augmente le risque d’accident pendant l’amarrage. Entre autres, déployer les amarres directement à partir d’un treuil peut ne pas laisser assez de temps et d’options pour réagir en cas de problème.
1.9.2 Marquage des zones de coup de fouet sur le pont
Une amarre sous tension qui se rompt ou se dégage brusquement agit comme un fouet et peut causer des blessures. Les forces d’impact et d’inertie de l’amarre dépendent de l’élasticité et de la résistance du matériau dont elle est faite et de la tension qui est exercée sur elle, tandis que la zone dangereuse de coup de fouet est déterminée par les points d’attache de l’amarre et la tension exercée sur elleNote de bas de page 13.
La pratique courante dans l’industrie maritime au niveau mondial était de marquer les zones de coup de fouet sur les ponts des postes d’amarrage. Par exemple, jusqu’à récemment, le Code of Safe Working Practices for Merchant Seafarers (COSWP) de la Maritime and Coastguard Agency du Royaume-Uni recommandait le marquage autour des points critiques comme le tambour de halage, les chaumards à rouleaux, et les bonhommes pour avertir les marins de s’éloigner de ces zones lorsque les amarres sont sous tension.
Cependant, des études récentesNote de bas de page 14 ont démontré que la nature du phénomène du coup de fouet est plus complexe qu’initialement perçue. Cela est dû à des facteurs comme la configuration des postes d’amarrage ainsi que le type et le matériau de la ligne d’amarrage utilisée (élasticité et résistance à la rupture).
La dernière version du COSWPNote de bas de page 15 déconseille le marquage des zones de coup de fouet sur le pont. Le Code recommande que le poste d’amarrage en entier soit considéré comme une zone de coup de fouet et qu’une signalisation claire et visible soit affichée pour en avertir l’équipage. Il est également recommandé de réaliser une vue à vol d’oiseau du poste d’amarrage pour identifier les zones potentiellement dangereusesNote de bas de page 16.
Fait établi : Autre
Lors de l’événement à l’étude, aucun marquage ni aucune signalisation des zones potentiellement dangereuses ou des zones de coup de fouet n’étaient apparents aux postes d’amarrage.
1.10 Conception ergonomique des systèmes et de l’équipement
La conception ergonomique des systèmes et de l’équipement est une approche de conception centrée sur l’utilisateur, visant à optimiser l’interaction entre les utilisateurs et leur environnement technique. Cette approche s’emploie à développer des interfaces intuitives, à diminuer la charge mentale et physique, tout en promouvant la sécurité par la réduction des risques liés aux erreurs humaines.
Il existe quelques normes et pratiques recommandées pour la conception de composantes spécifiques comme les centres de commande, les consoles (informatisées ou non), et les panneaux câblés. L’American Society for Testing and Materials (ASTM) a publié un guide de la conception de systèmes, d’équipements, et d’installations maritimes. Ce document vise à permettre la conception d’un système facile d’utilisation qui répond aux besoins de l’utilisateur et à ses contraintes internes (p. ex., des contraintes physiques et cognitives) et externes (p. ex., l’environnement et les pressions temporelles). Il formule entre autres les principes d’ergonomie suivants [traduction] :
- « Le contenu des informations présentées à un opérateur doit lui permettre d’accomplir la mission prévue, mais se limiter à ce qui est nécessaire pour effectuer des actions spécifiques ou pour prendre des décisionsNote de bas de page 17. »
- « Les commandes doivent être placées de telle manière qu’il ne soit pas nécessaire de croiser les mains ou de changer de main pour utiliser 2 commandes simultanémentNote de bas de page 18. »
- « Toutes les commandes doivent pouvoir être actionnées aussi bien par le personnel portant des vêtements normaux que par le personnel portant de l’équipement de protection individuelle (EPI) comme des bottes, des gants et des vêtements de protection contre les matières dangereusesNote de bas de page 19. »
- « Les signaux de danger et d’avertissement doivent être immédiatement et facilement discernables les uns des autres et doivent être appliqués de manière cohérente pour toutes les alarmes. »Note de bas de page 20
- « Les commandes doivent être conçues et placées de manière à prévenir toute activation accidentelle. Les méthodes acceptables pour réduire la probabilité d’une activation accidentelle comprennent : […] [r]estreindre l’accès aux commandes en les isolant ou en les munissant d’un capot de protection ou une barrière physiqueNote de bas de page 21. »
1.11 Treuils sur le poste d’amarrage arrière
1.11.1 Composantes des treuils
Le treuil est constitué d’un moteur électrique relié à un arbre d’entraînement par une boîte de transmission. L’arbre d’entraînement traverse un tambour d’amarre qui est divisé en 2 sections (1 section de stockage et 1 section de tension) et un tambour de halage (aussi appelé une poupée de cabestan) qui est fixé à son extrémité extérieure. Un levier permet d’embrayer et de débrayer le tambour d’amarre. Le tambour de halage ne peut pas être débrayé de l’arbre. Lorsque le navire est amarré, le moteur du treuil est coupé et son frein électromagnétique est activé. Le frein principal à bande de friction est activé automatiquement au moyen d’un cylindre hydraulique, bloquant le tambour d’amarre et fixant ainsi l’amarre; son ajustement est manuel et se fait au moyen d’un volant (figure 5). L’arbre d’entraînement peut alors être débrayé afin qu’une 2e amarre puisse être utilisée sur le tambour de halage.
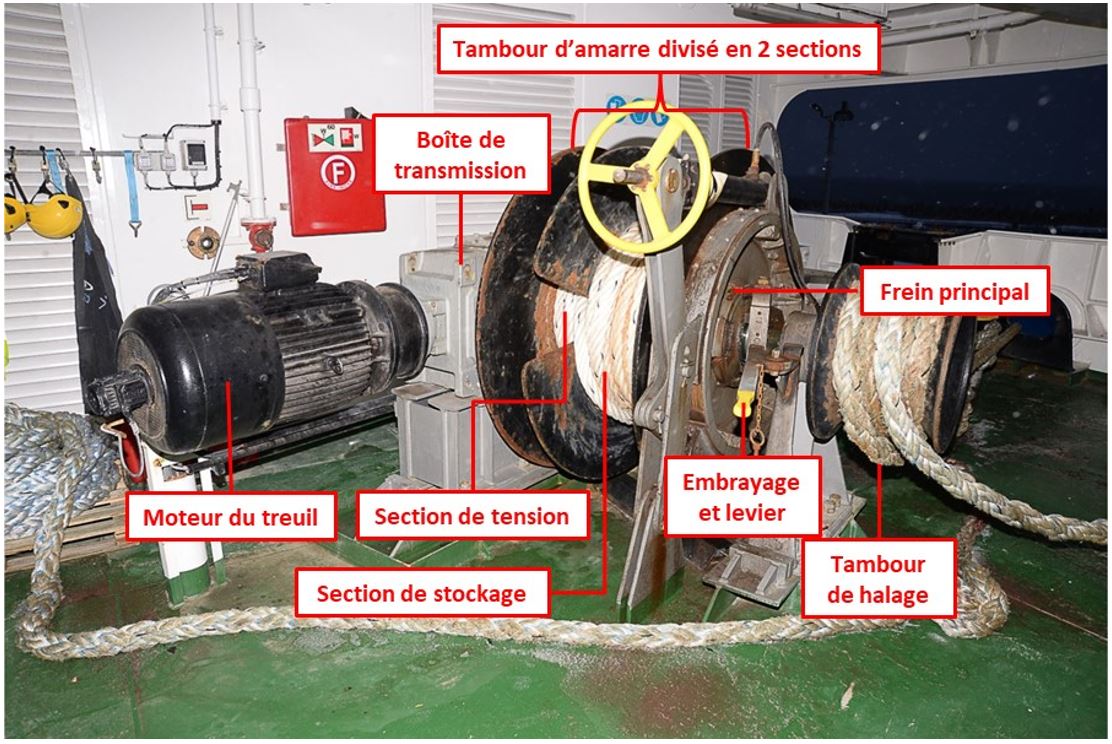
Les moteurs électriques sont équipés de freins électromagnétiques automatiques sur l’arbre d’entraînement afin d’éviter que les moteurs tournent en roue libre lorsque l’alimentation est coupéeNote de bas de page 22. Le frein électromagnétique s’ajoute au frein principal. Sur le Madeleine II, le frein électromagnétique est localisé à même le bâti du moteur électrique, côté ventilateur.
L’opérateur contrôle la vitesse et le sens de rotation du treuil à l’aide des commandes qui se trouvent sur le bloc de contrôle principal du poste de commande des treuils.
Lors de la prise de possession du navire en mars 2021, la CTMA a obtenu les documents techniques des treuils; cependant il n’y avait pas de manuel d’utilisation. L’équipage espagnol a offert aux employés de la CTMA une démonstration des fonctionnalités des treuils et des alarmes, ainsi que du redémarrage des treuils en cas de défaillance. Les employés de la CTMA ont aussi eu la possibilité de se familiariser avec l’équipement sous la supervision de l’équipage espagnol.
1.11.2 Composantes du poste de commande
Le poste de commande des treuils comporte 2 blocs : le bloc de contrôle principal et le bloc de contrôle avancé (figure 6).

1.11.2.1 Bloc de contrôle principal
Le bloc de contrôle est divisé en 3 sections, une pour chaque treuil. Chaque section contient les commandes de sens de rotation, de vitesse et de couple du treuil, des voyants lumineux indiquant l’état du treuil (RUNNING [en marche] ou FAILURE [défaillance]), et un bouton d’arrêt d’urgence (figure 7). Les 3 boutons d’arrêt d’urgence ne sont pas recouverts d’un canal ou d’un capot de protection.
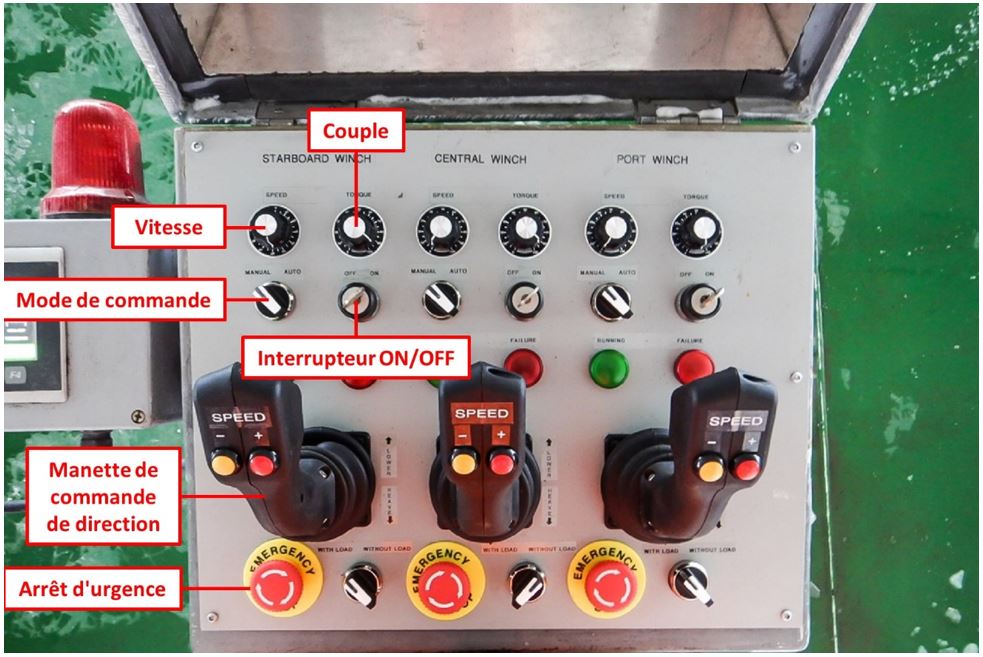
Le sens de rotation du tambour de chaque treuil est contrôlé par une manetteNote de bas de page 23. La vitesse est contrôlée soit par les boutons sur la manette, soit par un bouton de réglage.
Le couple peut être contrôlé en mode manuel ou automatique grâce à un interrupteur qui permet de sélectionner le mode d’opération voulu. En mode manuel, le couple est contrôlé par l’opérateur à l’aide du bouton de réglage. En mode automatique, l’opérateur sélectionne un niveau de couple à atteindre à l’aide du bouton de réglage. Le couple augmente graduellement, de façon automatique, jusqu’à ce que la valeur sélectionnée soit atteinteNote de bas de page 24.
1.11.2.2 Bloc de contrôle avancé
Toutes les fonctions de commande et de protection des moteurs des treuils sont gérées par un centre de contrôle intelligent de l’alimentation et des moteurs. Ce centre de contrôle a été programmé avec les données opérationnelles, statistiques, et de diagnostic, et il organise les données de communication entre le système d’automatisation et l’artère de moteur. Cela lui permet de détecter les conditions d’anomalie ou de risque potentiel pour les moteurs et les opérateurs.
Lorsque le centre de contrôle détecte une anomalie, il en avise l’opérateur au moyen dubloc de contrôle avancé. Le bloc de contrôle avancé (figure 8) est constitué d’un écran tactile placé à la gauche du bloc de contrôle principal. Au moment de l’accident, l’interface du bloc de contrôle avancé était en espagnol. Elle comprend 5 boutons tactiles : 2 boutons permettent d’avoir accès au menu de contrôle et au menu d’état, et 3 boutons servent à embrayer ou débrayer les treuils (un bouton par treuil).
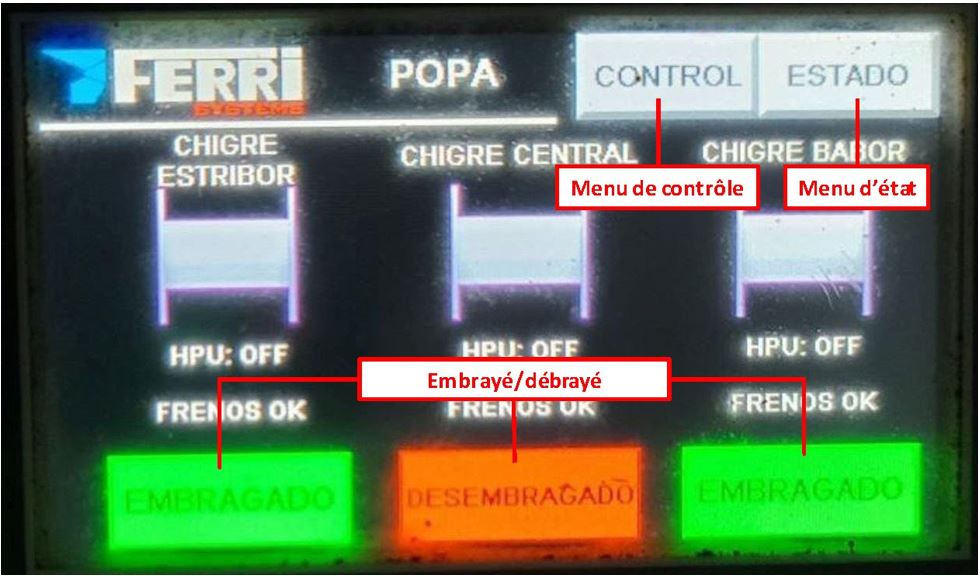
Lorsque les treuils sont en état de fonctionner, les boutons d’embrayage et débrayage sont illuminés en vert. Lorsque les treuils sont en défaillance, les boutons sont illuminés en rouge.
1.11.3 Alarmes
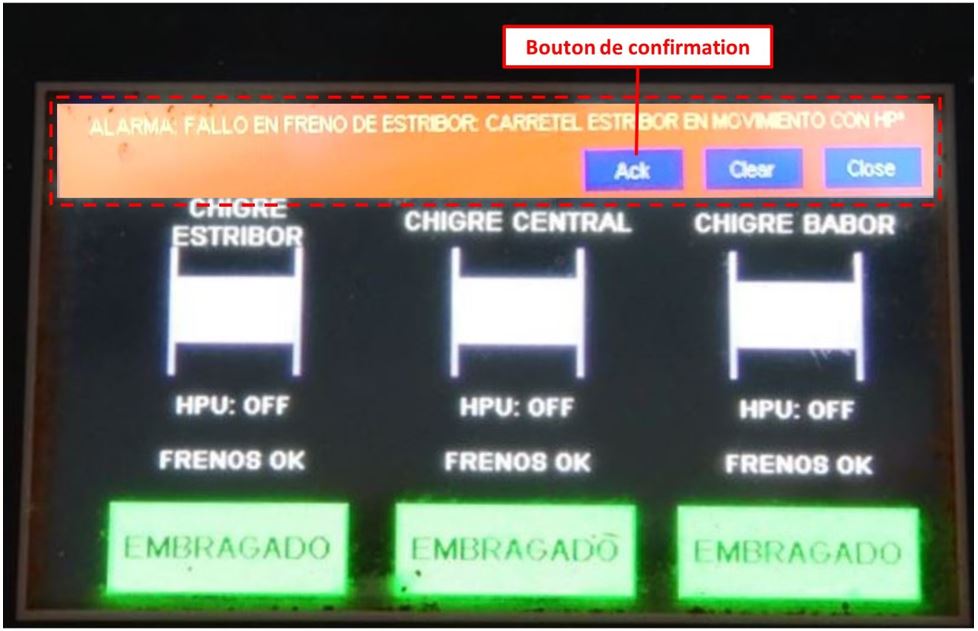
Le bloc de contrôle avancé est muni de 2 niveaux d’alarme. Lorsqu’une anomalie est détectée, une 1re alarme se déclenche : l’opérateur est averti par un message d’alarme en espagnol, un signal sonore et par le clignotement du voyant de l’alarme de frein (figure 6).
Cette alarme n’empêche pas le fonctionnement du treuil. Le bouton d’embrayage et débrayage du treuil reste vert. Afin d’arrêter la 1re alarme, l’opérateur doit appuyer sur le bouton « Ack » (confirmation) sur le bloc de contrôle avancé, ce qui ramène l’affichage à son menu initial (figure 9).
La 2e alarme se déclenche lorsque les paramètres de l’anomalie ont atteint un certain niveau configuré dans le système, et le treuil cesse de fonctionner. Cette défense vise à protéger le moteur du treuil.
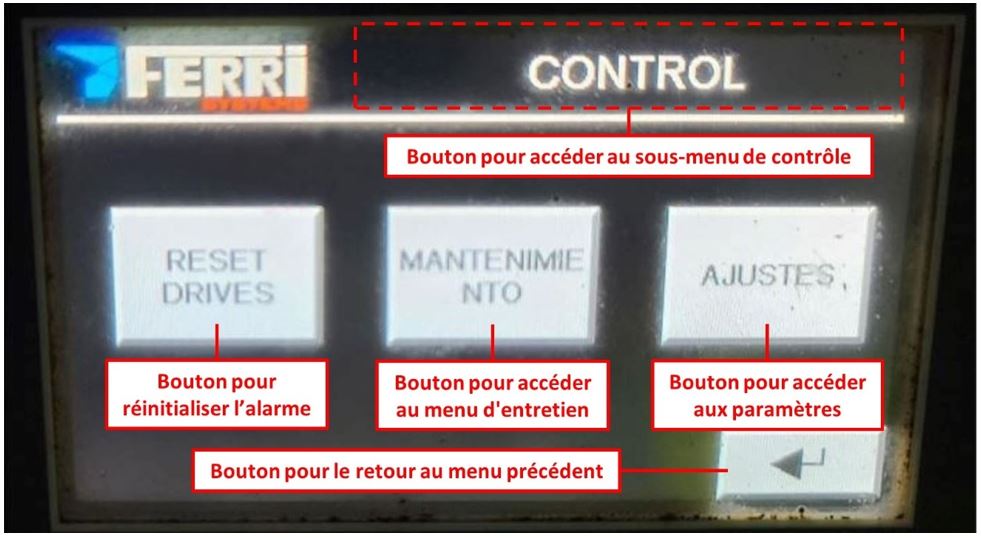
L’opérateur est averti par un signal sonore et par le clignotement du voyant de l’alarme de frein. La lumière FAILURE du treuil touché s’allume aussi sur le bloc de contrôle principal. Pour réactiver le treuil, l’opérateur doit appuyer sur le menu de contrôle du bloc de contrôle avancé et accéder au sous-menu. Dans le sous-menu, il doit appuyer sur le bouton de réarmement de l’alarme. Pour revenir au menu précédent et reprendre le contrôle de fonctionnement du treuil, il faut appuyer sur le bouton de retour. Si l’anomalie est toujours présente, l’alarme se réarmera jusqu’à ce que le problème soit résolu (figure 10).
De son poste dans le coin tribord du navire, l’officier peut voir qu’une alarme de frein s’est déclenchée, mais ne peut pas savoir s’il s’agit de la 1re ou de la 2e alarme.
Depuis l’acquisition du traversier, les alarmes des treuils s’activaient à l’occasion, sans conséquence négative, car l’opérateur du treuil était capable de réarmer l’alarme.
1.12 Amarrage du Madeleine II
À Souris, le Madeleine II accoste de son côté tribord avec la proue orientée vers la rampe d’accès du quai et emploie la rampe de l’étrave pour le déchargement et le chargement des véhicules. À Cap-aux-Meules, le navire accoste également de son côté tribord mais avec la poupe faisant face à la rampe d’accès du quai.
Environ 5 milles marins avant l’arrivée du Madeleine II à un port, le plan d’amarrage est transmis à l’équipage.
Lors de l’arrivée, le rôle du premier officier est de superviser les opérations sur le poste d’amarrage du navire qui approche le quai en premier. Il doit informer périodiquement le capitaine de la distance entre le navire et le quai.
En préparation pour l’accostage, les matelots préparent les amarres : des gardes montantes, des traversières, des amarres de bout avant et des amarres de bout arrière. En premier lieu, ils déroulent une partie des amarres à partir des tambours des treuils et les posent sur le pont. Ils font ensuite passer l’œil de chaque amarre à travers les chaumards à rouleaux et y attachent des lance-amarres pour être prêts à les lancer vers le quai. Finalement, ils placent sur le pont les amarres supplémentaires qui servent à assujettir le navire une fois qu’il a atteint sa position finale, à la toute fin de la manœuvre d’accostage.
La communication entre le capitaine et les officiers s’effectue au moyen de radiotéléphones portatifs à UHF. La communication entre l’équipage et les préposés aux amarres s’effectue au moyen de radiotéléphones portatifs à UHF ou de vive voix.
1.12.1 Amarrage à Cap-aux-Meules
Lors de l’approche finale à Cap-aux-Meules, le premier officier se rend au poste prévu pour lui (figure 2) afin de superviser les opérations du pont arrière. Il coordonne les actions des matelots et communique avec le capitaine pour le tenir informé des opérations et de la distance entre l’arrière du navire et la rampe d’accès du quai. Un matelot se place au poste de commande des treuils et un autre matelot s’installe pour manipuler les amarres.
L’opérateur du treuil est responsable de contrôler la tension de l’amarre. Comme l’amarre ne doit jamais être complètement tendue tant que le navire n’est pas en position finale, l’opérateur du treuil suit les indications du matelot aux amarres afin d’ajuster la vitesse du treuil en fonction de la tension de l’amarre. Le matelot aux amarres communique avec l’opérateur du treuil grâce à des gestes standards, parfois combinés à des commandes verbales. L’opérateur doit également surveiller l’amarre sur le tambour afin de s’assurer qu’il ne s’emmêle pas et qu’il se déroule correctement.
Sur le quai, l’équipe des préposés aux amarres est composée de 6 personnes : 3 préposés manipulent manuellement les amarres à l’avant du navire et 3 autres le font à l’arrière. Pour chaque équipe, une seule amarre à la fois est manipulée et placée sur le bollard selon les ordres venant du navire.
À l’approche de la rampe du quai, sous les commandes du premier officier, le matelot aux amarres déploie la 1re garde montante. Les préposés à terre ramassent la garde montante et la place sur un bollard. Le matelot aux amarres fait alors signe à l’opérateur du treuil de commencer à dérouler l’amarre. La garde montante se déroule lentement du tambour du treuil et le matelot aux amarres la surveille afin de s’assurer qu’elle ne se tende pas. Le matelot indique à l’opérateur d’augmenter ou de réduire la vitesse du treuil afin de garder une faible tension jusqu’à l’immobilisation du navire. Pendant ce temps, le premier officier surveille les opérations, et informe le capitaine de la distance restante entre l’arrière du navire et la rampe du quai.
Une fois le navire immobilisé, la garde montante utilisée sur le tambour d’amarre est tendue à l’aide du treuil et est bloquée au moyen du frein principal. Le matelot aux amarres envoie ensuite les 2 autres amarres qui sont sur les autres treuils, l’une après l’autre. À leur tour, ces amarres sont tendues et bloquées au moyen du frein principal de chacun des treuils. Le matelot aux amarres déploie une 2e garde montante. La 2e garde montante est tendue en utilisant le tambour de halage du treuil et ensuite elle est transférée sur la bitte d’amarrage du navire. Par la suite, une 2e amarre est déployée de la même façon de chacun des 2 autres treuils. Des amarres additionnelles peuvent être requises, en fonction de la durée de l’arrêt au port et des conditions météorologiques attendues.
Si le capitaine considère que les conditions météorologiques le permettent, il peut décider de faire déployer la 2e garde montante presque en même temps que la 1re garde montante. Cette méthode nécessite l’aide d’un 3e matelot. Lorsque la 1re garde montante est placée sur le bollard, le 3e matelot Note de bas de page 25 déploie la 2e garde montante, qui est placée sur un bollard du quai par les préposés aux amarres qui sont à terre. Ce matelot contrôle manuellement la tension de la 2e garde montante en la faisant glisser sur une bitte du pont. Il doit garder une tension identique à la tension de la 1re garde montante. Lorsque le navire est immobilisé, il attache la 2e garde montante sur la bitte et la procédure d’amarrage redevient la même qu’avec 1 seule garde montante. Cette opération permet d’économiser du temps, car l’utilisation du tambour de halage n’est pas nécessaire.
Selon une pratique informelle de la CTMA, les capitaines pouvaient demander l’assistance de remorqueurs au quai no 2 lorsque le vent soufflait à une vitesse de 25 nœuds ou plus et provenant d’une direction entre le sud-est et le sud-ouest.
Au moment de l’accident, les travaux pour le remplacement du bollard B80 sur le quai no 2 rendaient difficiles les déplacements des préposés aux amarres sur le quai.
1.12.2 Étude d’amarrage du Madeleine II au quai no 2
Dans l’amarrage standard d’un navire, des gardes montantes arrière et des amarres de bout avant empêchent le navire de bouger vers l’arrière. En prévision de l’acquisition du Madeleine II, et sachant que le quai du traversier ne serait pas prêt pour l’accueillir, la CTMA a embauché une compagnie spécialisée dans les domaines des services de consultation, des services d’ingénierie et des services techniques pour mener une étude sur l’accostage et la phase statique de l’amarrage au quai no 2. Le but était d’identifier les conditions critiques relatives à l’utilisation temporaire du quai durant les travaux de mise à niveau du quai du traversier.
La note technique rédigée par la compagnie de consultation précise que l’étude ne vise qu’à modéliser certaines configurations statiques d’amarrage notamment dans le but de cibler les besoins en travaux correctifs, le cas échéant.
Trois configurations d’amarrage statique ont été étudiées : une configuration utilisant le bollard B80, une configuration dans laquelle le bollard B80 est hors d’usage et où 2 amarres utilisent le bollard B100, et finalement, une configuration optimisée par rapport à la 2e configuration d’amarrage, où une seule amarre utilise le bollard B100 (Figure 11). Pour les 3 configurations, une seule garde montante utilise le bollard B81.
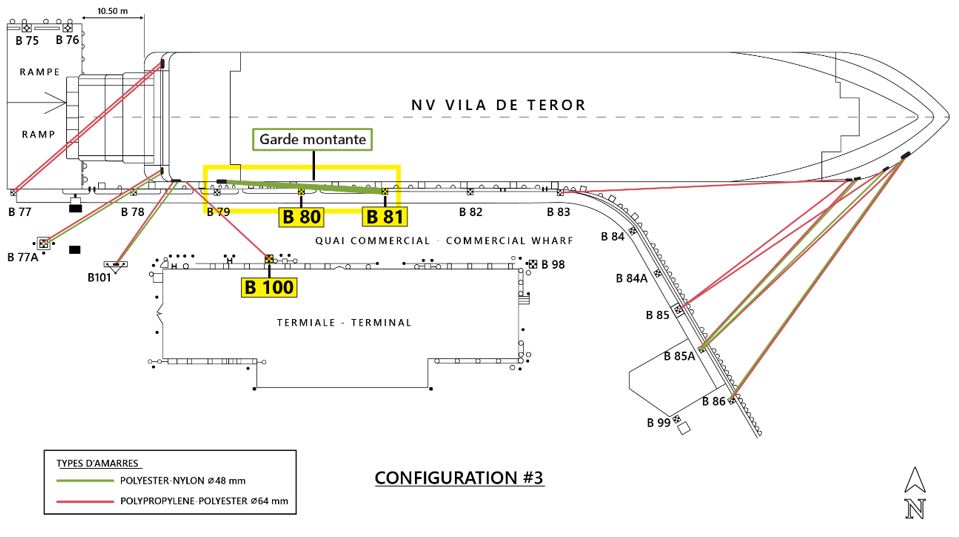
La conclusion de l’étude d’accostage était la suivante :
En l’absence de travaux correctifs (configuration n° 3), les résultats obtenus indiquent que le navire NM Madeleine II ne devrait pas être amarré au quai n° 2 en présence de vents d’une vitesse de 19 nœuds ou plus, provenant d’entre le sud-ouest (SO) et l’est-sud-est (ESE), et d’une vitesse maximale de 65 nœuds, dans les autres directions, sans les mesures compensatoires de réduction de la tension, notamment, par remorqueurs, gestion du trafic, déploiement de l’ancre à tribord, repositionnement du navire vers la rampe du quai et gestion active des ballasts en fonction des marées.
Afin d’améliorer la capacité d’amarrage selon les configurations étudiées, il est recommandé de procéder au remplacement des bornes d’amarrage B80 et B100 afin d’augmenter leur capacité en fonction des besoins opérationnels.
Toutes modifications aux configurations d’amarrage invalident les résultats contenus dans la présente étudeNote de bas de page 26.
Malgré la conclusion de l’étude, en l’absence du bollard B80, l’équipage plaçait à l’occasion les 2 gardes montantes arrière sur le bollard B81 lorsque les conditions météorologiques l’exigeaient.
1.13 Gestion de la sécurité
Les objectifs du Code international de gestion pour la sécuritéNote de bas de page 27 (Code ISM) sont d’assurer la sécurité en mer, de prévenir les blessures ou les pertes de vies humaines et d’éviter les dommages à l’environnement. Selon le Code ISM, les objectifs de gestion de la sécurité d’une compagnie sont les suivants : prévoir des pratiques sécuritaires relativement à l’exploitation des navires et assurer un environnement de travail sûr en évaluant tous les risques identifiés pour les navires, le personnel, et l’environnement; établir des mesures de protection appropriées à l’égard de ces risques; et améliorer continuellement les compétences en matière de gestion de la sécurité du personnel à terre et à bord des navires. Le Code ISM, qui s’applique à tous les navires assujettis à la Convention internationale pour la sauvegarde de la vie humaine en mer (Convention SOLAS), exige que les compagnies et les navires élaborent et mettent en œuvre un système de gestion de la sécurité (SGS).
Au moment d’écrire le rapport, au Canada, les navires non assujettis à la Convention SOLAS qui effectuaient des voyages intérieurs n’étaient pas tenus d’avoir un SGS.Note de bas de page 28 Toutefois, les compagnies qui mettent volontairement en œuvre un SGS peuvent le faire vérifier par une société de classification. Après avoir vérifié que le SGS mis en œuvre volontairement répond aux exigences du Code ISM et que la compagnie et le navire sont exploités conformément au SGS, la société de classification délivrera un document de conformité à la compagnie et un certificat de gestion de la sécurité au navire. TC n’assure pas la vérification ou la surveillance de ces systèmes mis en œuvre volontairement.
1.13.1 Procédures d’exploitation
Les procédures d’exploitation font partie d’un SGS et sont essentielles pour assurer la sécurité et l’efficacité d’un navire, en particulier pour les tâches essentielles à la sécurité. Des procédures bien écrites fournissent une description étape par étape de la manière dont une tâche doit être effectuée, réduisant ainsi le nombre de décisions devant être prises par les opérateurs en cours de manœuvre. Des procédures détaillées améliorent la sécurité des opérations, assurent la cohérence d’un opérateur à l’autre, et réduisent le risque d’erreurs et d’omissions.
Lorsque des procédures sont proposées de façon non officielle, c’est-à-dire qu’elles ne sont ni écrites, ni intégrées dans le système de gestion de la sécurité, les façons de faire deviennent variables. En effet, en l’absence de référence écrite, les façons de faire sont transmises oralement d’un opérateur à l’autre et sont ainsi sujettes à de petits changements d’un opérateur à un autre, ce qui peut mener à une grande divergence au fur et à mesure que l’information voyage au sein de l’équipe. De plus, avec le temps, les opérateurs sont susceptibles de modifier leur façon de faire : ici encore, il s’agit de petits changements qui s’accumulent au fil du temps et qui mènent éventuellement à une grande divergence. Enfin, lorsque les façons de faire ou les procédures ne sont pas officialisées et couchées par écrit, elles peuvent être perçues comme une suggestion plutôt qu’une exigence. Le recours aux procédures écrites et détaillées permet d’atténuer la déviation lente des procédures. De plus, cela permet de bien expliquer les risques associés aux manœuvres et la façon de mitiger ces risques. Comme les opérateurs n’ont pas le temps d’effectuer une évaluation exhaustive des risques en cours de manœuvres, le recours à des procédures permet de sensibiliser les opérateurs à l’avance et d’augmenter l’enveloppe de sécurité.
1.13.2 Gestion de la sécurité de la CTMA
La CTMA avait volontairement élaboré un SGS pour sa flotte en 2003 et avait retenu les services d’une société de classification pour vérifier et certifier sa conformité au Code ISM.
Le manuel de gestion du système (MGS) de la CTMA contient plusieurs politiques pour la flotte. Ce manuel renvoie au Manuel des opérations et procédures (MOP) pour les directives et les procédures écrites à suivre. Il n’y a pas de manuel spécifique pour chaque navire.
La méthode d’amarrage du Madeleine II a été développée par la CTMA avant sa mise en fonction, en juin 2021. Cette méthode n’a jamais été transposée en une procédure écrite.
Le MOP ne précise pas les conditions exigeant l’utilisation obligatoire de remorqueurs, cependant le MOP stipule que les capitaines sont responsables de toutes les communications et tous les arrangements nécessaires pour le remorquage.
Le MOP contient une procédure pour la protection de la tête. L’objectif de cette procédure est de s’assurer de contrôler les risques de blessure à la tête. Entre autres, cette règle de sécurité exige le port du casque pour tous les employés qui participent aux opérations d’amarrage sur le quai et les ponts extérieurs des navires ou qui sont exposés à des risques de se faire frapper ou coincer la tête. L’enquête a établi, que le jour de l’événement, le premier officier, le matelot au poste d’amarrage arrière, ainsi qu’un des préposés aux amarres sur le quai ne portaient pas leurs casques de sécurité.
Fait établi : Autre
Le jour de l’événement, le premier officier, le matelot au poste d’amarrage arrière, ainsi qu’un des préposés aux amarres sur le quai ne portaient pas leurs casques de sécurité.
1.14 Supervision
La supervision est un contrôle administratif qui soutient ou renforce l’utilisation de notions enseignées lors de la formation, le respect des procédures, le choix des priorités, le maintien d’une charge de travail adéquate, la prévention d’un niveau de fatigue élevé, ainsi que l’engagement et la motivation. La supervision peut avoir un impact important sur de nombreux facteurs qui influencent les comportements en milieu de travail.
Même s’il s’agit d’un aspect clé de la sécurité, l’efficacité de la supervision peut être compromise si un superviseur prend un rôle actif dans les opérations en cours. Cela limite la capacité du superviseur de surveiller efficacement l’ensemble des opérations, puisque son attention est dirigée sur les tâches qu’il est en train d’accomplir.
Comme l’information disponible dans l’environnement de travail est vaste et que le traitement de l’information se fait en continu, les informations moins importantes doivent être ignorées afin de laisser la place aux informations critiques pour la tâche à accomplir. En outre, bien que l’on puisse diriger rapidement notre attention d’une source d’information à une autre, il n’est possible de traiter qu’une source d’information à la fois. Effectuer plusieurs tâches simultanément entraîne une diminution de la performance pour chacune des tâches.
1.15 Événements antérieurs
Au fil des ans, le BST a été informé de nombreux accidentsNote de bas de page 29 au cours desquels des marins ont été blessés, dans certains cas gravement ou mortellement, dans des opérations d’amarrage.
En 2017 le BST a lancé une enquête sur l’événement maritime M17C0060 survenu le 22 mai 2017, dans lequel le second officier du vraquier Nord Québec a été mortellement blessé au cours d’un accident d’amarrage tandis que le navire accostait au quai 16 du port de Trois-Rivières (Québec). Le rapport d’enquête offre un résumé des 23 événements qui avaient été signalés au BST au cours des 10 années précédentes et qui mettaient en cause des opérations d’amarrage au Canada sur des navires battant pavillon canadien ou étranger.
De mai 2017 à mars 2022, 12 événements (en comptant celui à l’étude) mettant en cause des opérations d’amarrage au Canada sur des navires canadiens et étrangers ont été signalés au BST. Dans ces événements, 11 personnes ont subi des blessures graves et 2 personnes ont subi des blessures mortelles. Dans 4 de ces événements, des amarres sous tension étaient en cause; dans 5 cas, des personnes se sont fait écraser un ou plusieurs membres; et dans 3 cas, des personnes ont trébuché et chuté au cours d’opérations d’amarrage.
1.16 Liste de surveillance du BST
La Liste de surveillance du BST énumère les principaux enjeux de sécurité qu’il faut s’employer à régler pour rendre le système de transport canadien encore plus sûr.
La gestion de la sécurité figure sur la Liste de surveillance 2022. Comme l’événement à l’étude le démontre, même lorsque des processus structurés de gestion de la sécurité sont en place, certains risques peuvent ne pas avoir été évalués adéquatement.
MESURES À PRENDRE La gestion de la sécurité restera sur la Liste de surveillance du secteur du transport maritime jusqu’à ce que :
|
1.17 Rapports de laboratoire du BST
Le BST a produit les rapports de laboratoire suivants dans le cadre de la présente enquête :
- LP037/2022 – Study of winch design, operation and ergonomics (Étude sur la conception, le fonctionnement et l’ergonomie des treuils)
- LP041/2022 – Mooring bollard examination (Examen du bollard d’amarrage)
2.0 Analyse
L’analyse se concentrera sur les facteurs causaux et contributifs qui ont conduit à l’accident d’amarrage mortel sur le Madeleine II lors de son arrivée aux îles de la Madeleine (Québec). L’analyse portera également sur le système de gestion de la sécurité relativement aux opérations d’amarrage de la Coopérative de Transport Maritime et Aérien (CTMA), sur l’état des installations portuaires à Cap-aux-Meules (Québec) et sur la conception des treuils d’amarrages du navire.
2.1 Amarrage le jour de l’accident
Le 9 janvier, avant l’arrivée du Madeleine II à Cap-aux-Meules, le capitaine et le premier officier avaient convenu de déployer une 2e garde montante durant la phase dynamique d’amarrage, notamment à cause des prévisions météorologiques et de travaux qui rendaient difficiles les déplacements sur le quai. Cette pratique nécessitait 1 matelot par garde montante, 1 matelot au poste de contrôle, et 1 officier pour la supervision et la communication avec le capitaine. Cependant, dans cet événement, seulement 2 matelots et 1 officier ont pris part à la manœuvre au poste d’amarrage arrière. L’enquête n’a pas permis de déterminer pourquoi un 3e matelot n’était pas sur place lors de l’amarrage.
Pour pallier l’augmentation de la charge de travail causée par l’absence d’un 3e matelot pendant l’approche finale du navire vers la rampe du quai no 2, le premier officier a pris une part active dans les opérations d’amarrage. Il a quitté son poste et s’est occupé de manipuler la 2e garde montante.
La 1re garde montante qui avait été placée sur le bollard B81 était déroulée à partir du treuil à mesure que le navire reculait. L’enquête a permis de déterminer que, au bout de quelques mètres, la garde montante s’est coincée sur le tambour du treuil, probablement parce qu’elle s’était emmêlée sur le tambour. Cela l’a empêchée de se dérouler du tambour et elle s’est tendue, déclenchant une 1re alarme sur le contrôle du treuil. Puisque la garde montante avait déjà été placée sur le bollard, et étant donné que le navire était toujours en mouvement vers l’arrière à une vitesse d’environ 1,0 nœud, la tension sur la garde montante a augmenté.
La 2e alarme s’est déclenchée et le treuil ne répondait plus aux commandes de l’opérateur du treuil. L’opérateur a été incapable de réarmer l’alarme puisque l’anomalie était toujours présente. Parce qu’il avait perdu le contact visuel avec le premier officier, qui était maintenant caché par le tambour du treuil, et l’autre matelot, qui s’était retiré en voyant la tension sur la garde montante, il a été incapable de les avertir de la situation.
Le premier officier était occupé à manipuler la 2e garde montante dans la zone coup de fouet et avait cessé de porter attention à la situation à l’extérieur du navire. Il n’a donc pas vu que la tension sur la 1re garde montante augmentait. Il n’était pas non plus en mesure de voir l’opérateur de treuil qui tentait de l’informer que le treuil était arrêté. La situation s’est développée très rapidement et le capitaine n’a pas été avisé à temps pour pouvoir arrêter le navire en urgence.
Fait établi quant aux risques
Si les superviseurs jouent un rôle actif pendant des tâches essentielles pour la sécurité, comme l’amarrage d’un navire, leur attention sera divisée et ils seront moins aptes à superviser tous les aspects de la tâche, augmentant le risque que des enjeux essentiels pour la sécurité ne soient pas détectés à temps pour prévenir un accident.
La force de rupture certifiée minimale de l’amarre utilisée pour la 1re garde montante arrière était de 73 tonnes, alors que la capacité du bollard B81 était de 20 tonnes. Le bollard B81 a subi une rupture, car sa capacité de charge maximale a été largement dépassée par la tension de la garde montante créée par le navire en mouvement vers l’arrière avec une vitesse d’environ 1,0 nœud. À la suite de l’événement à l’étude, le laboratoire du BST a examiné le bollard B81 pour déterminer la cause de sa rupture. La conclusion de cet examen a révélé que le bollard a subi une charge dépassant sa résistance à la rupture.
Lorsque la défaillance du treuil est survenue alors que le navire était en mouvement, ni l’opérateur du treuil, ni l’officier n’étaient en mesure de réagir et de corriger la situation. Le bollard d’amarrage B81 a cédé sous la tension de la garde montante, et celle-ci s’est libérée brusquement. L’énergie emmagasinée dans les fibres synthétiques de la garde montante l’a fait rebondir dans un mouvement de coup de fouet vers le haut en direction du poste d’amarrage arrière du Madeleine II.
Fait établi quant aux causes et aux facteurs contributifs
Alors que le navire était en mouvement, la 1re garde montante coincée sur le treuil a fait augmenter la tension au-delà du point de rupture du bollard et la garde montante est revenue comme un coup de fouet vers le poste d’amarrage arrière. Le premier officier s’est retrouvé dans la zone de coup de fouet de la garde montante, et a été blessé mortellement.
2.2 Gestion de la sécurité des opérations d’amarrage
Le système de gestion de la sécurité de la CTMA ne comprenait pas de procédure propre au Madeleine II.Il n’existait pas de procédure officielle écrite et basée sur une analyse des risques concernant les méthodes d’amarrage.
Il n’existait pas de manuel d’exploitation pour les treuils, l’interface de l’écran tactile était en espagnol, et le risque lié à l’utilisation de ces treuils pendant la phase dynamique d’amarrage n’avait pas été évalué.
Pendant les amarrages du Madeleine II, la 1re garde montante était déroulée à partir du treuil. L’alarme du treuil s’activait à l’occasion, sans conséquence négative, ce qui a entraîné une désensibilisation de l’équipage. L’opérateur se contentait de réarmer l’alarme lorsqu’elle apparaissait.
De plus, la pratique d’amarrer le Madeleine II au quai no 2 en utilisant 2 gardes montantes durant la phase dynamique demandait l’ajout d’un 3e matelot. En l’absence d’une procédure officielle écrite, les risques associés à l’utilisation de la méthode à 2 gardes montantes en l’absence d’un 3e matelot n’ont pas été pas bien compris. L’existence d’une procédure écrite officielle appuie la prise de décision en réduisant l’incertitude et en offrant des directives claires à l’équipage.
Fait établi quant aux causes et aux facteurs contributifs
En l’absence d’une procédure écrite officielle pour l’amarrage du navire, l’équipage était privé de lignes directrices pour la prise de décision et les risques de la méthode d’amarrage à 2 gardes montantes durant la phase dynamique n’ont pas été bien compris par celui-ci, notamment la nécessité d’avoir un 3e matelot pour cette manœuvre.
La CTMA avait fait faire une étude d’amarrage pour l’utilisation du quai no 2. Au terme de cette étude, on a recommandé de remplacer le bollard B80 par un bollard de 75 tonnes et de ne placer qu’une seule garde montante sur le bollard B81. Les capitaines de la CTMA étaient au courant de cette étude et de ces recommandations. En l’absence du bollard B80 et malgré les recommandations de l’étude, l’équipage plaçait à l’occasion les 2 gardes montantes arrière sur le bollard B81 lorsque les conditions météorologiques l’exigeaient.
Fait établi quant aux risques
Si les analyses de risque ne prennent pas en compte les recommandations des études pertinentes, comme les limites de charge maximale sur un bollard lors d’un amarrage, il y a un risque que les dangers identifiés ne soient pas atténués.
2.3 Gestion des installations portuaires
Les installations portuaires de Cap-aux-Meules sont gérées par Transports Canada (TC). Lorsque des travaux doivent être effectués sur un quai, TC doit passer par Services publics et Approvisionnement Canada. Le processus de soumission pour les travaux est complexe, ce qui peut retarder les mises en chantier. La pandémie a aussi ralenti les travaux de mise à niveau du quai du traversier.
Sachant que les travaux au quai du traversier ne seraient pas terminés lors de la livraison du Madeleine II, CTMA avait commandé une étude pour l’utilisation temporaire du quai no 2. Le remplacement de 2 bollards par des plus résistants avait été recommandé pour améliorer la sécurité de l’amarrage. Après avoir présenté plusieurs demandes pour faire avancer le travail, la CTMA n’a reçu l’autorisation de prendre en charge les travaux de remplacement qu’en décembre 2021. Les travaux de remplacement du bollard B80 ont débuté en janvier 2022, soit 7 mois après la mise en service du Madeleine II.
Dans l’amarrage standard d’un navire, des gardes montantes arrière et des amarres de bout avant empêchent le navire de se déplacer vers l’arrière. La géométrie du quai no 2 n’est pas optimale pour l’amarrage du Madeleine II, car approximativement 57 m de l’avant du navire sont en saillie par rapport au quai. Pour cette raison, aucune amarres de bout avant ne peut être déployée et seulement des gardes montantes arrière placées sur les bollards B81 et B100 peuvent empêcher le navire de reculer. Cette méthode d’amarrage ajoute une charge supplémentaire sur les bollards B81 et B100; cette charge est aggravée par des vents forts.
Fait établi quant aux risques
Si les travaux de réfection du quai pour l’amarrage d’un navire comme un traversier ne sont pas achevés à temps pour sa mise en service, le navire pourrait utiliser un quai qui n’est pas adapté à ses particularités, augmentant les risques pour les personnes et le navire.
2.4 Conception du treuil d’amarrage
Afin d’optimiser l’interaction entre les individus et leur environnement technique, la conception des systèmes et de l’équipement maritime devrait suivre les pratiques recommandées et principes d’ergonomie, comme ceux qui se trouvent dans le guide de conception de l’American Society for Testing and Materials.
Sur le Madeleine II, plusieurs lacunes liées à la conception du treuil d’amarrage étaient susceptibles de provoquer des erreurs opérationnelles. Par exemple, pour réarmer l’alarme et réactiver le treuil, l’opérateur doit accéder au sous-menu sur l’écran tactile du bloc de contrôle avancé situé à gauche du bloc de contrôle principal. Ensuite, il doit revenir au menu précédent pour reprendre le contrôle du treuil. Une interface ne devrait contenir que les informations et les fonctions nécessaires à l’opérateur pour effectuer sa tâche. Or, l’interface du bloc de contrôle avancé contient de multiples menus et sous-menus non pertinents au travail de l’opérateur, et la fonction dont il a besoin rapidement, la réactivation du treuil, n’est pas directement disponible. De plus, l’interface du bloc de contrôle avancé est en espagnol, une langue qui n’est pas parlée ni comprise par les membres de l’équipage du pont arrière. L’opérateur a donc dû se fier entièrement sur sa mémoire pour choisir la bonne combinaison de menus et de sous-menus afin de réactiver le treuil à l’origine de l’alarme, ce qui a augmenté son temps de réponse. La conception du bloc de contrôle avancé augmente le temps de réponse de l’opérateur et le risque de commettre une erreur en situation critique.
Comme l’utilisation du bloc de contrôle avancé requiert une certaine motricité fine, l’opérateur aura tendance à se servir de sa main dominante. Le bloc de contrôle est situé à gauche du bloc de contrôle principal. Comme la majorité des opérateurs sont droitiers, ils auront tendance à utiliser leur main gauche pour contrôler le treuil et leur main droite pour réactiver le treuil après une alarme, ce qui nécessite un croisement des mains.
Par ailleurs, les écrans tactiles ne sont pas des interfaces de contrôle idéales, particulièrement en conditions hivernales, car ils sont difficiles à utiliser avec l’équipement de protection comme des gants et des mitaines.
Les treuils ont 2 niveaux d’alarme : le 1er niveau d’alarme avertit l’opérateur qu’une anomalie est survenue par rapport à un des paramètres préétablis dans le système. Cela n’affecte pas le fonctionnement du treuil. Le 2e niveau d’alarme avertit l’opérateur que l’anomalie a atteint sa limite configurée dans le système, et le treuil cesse de fonctionner. Le signal sonore et le signal visuel des 2 niveaux d’alarme sont les mêmes; seul l’opérateur peut les différencier, car il peut voir l’indication de défaillance sur le bloc de contrôle avancé. Comme les signaux sonores et visuels sont identiques, l’officier ne peut pas déterminer le niveau d’alarme sans communiquer avec l’opérateur.
Les boutons d’arrêt d’urgence des treuils se trouvent au bas du bloc de contrôle principal et ne sont pas recouverts d’un canal ou d’un capot de protection. Il est donc facile pour l’opérateur d’accrocher le bouton avec les avant-bras ou l’abdomen et ainsi déclencher accidentellement un arrêt d’urgence.
Fait établi quant aux risques
Si les systèmes d’un treuil ne sont pas conçus selon les pratiques recommandées de conception ainsi que les principes d’ergonomie, il y a un risque d’augmentation du temps de réponse de la part des opérateurs et de la possibilité d’erreur en situation critique.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- Alors que le navire était en mouvement, la 1re garde montante coincée sur le treuil a fait augmenter la tension au-delà du point de rupture du bollard et la garde montante est revenue comme un coup de fouet vers le poste d’amarrage arrière. Le premier officier s’est retrouvé dans la zone de coup de fouet de la garde montante, et a été blessé mortellement.
- En l’absence d’une procédure écrite officielle pour l’amarrage du navire, l’équipage était privé de lignes directrices pour la prise de décision et les risques de la méthode d’amarrage à 2 gardes montantes durant la phase dynamique n’ont pas été bien compris par celui-ci, notamment la nécessité d’avoir un 3e matelot pour cette manœuvre.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Si les superviseurs jouent un rôle actif pendant des tâches essentielles pour la sécurité, comme l’amarrage d’un navire, leur attention sera divisée et ils seront moins aptes à superviser tous les aspects de la tâche, augmentant le risque que des enjeux essentiels pour la sécurité ne soient pas détectés à temps pour prévenir un accident.
- Si les analyses de risque ne prennent pas en compte les recommandations des études pertinentes, comme les limites de charge maximale sur un bollard lors d’un amarrage, il y a un risque que les dangers identifiés ne soient pas atténués.
- Si les travaux de réfection du quai pour l’amarrage d’un navire comme un traversier ne sont pas achevés à temps pour sa mise en service, le navire pourrait utiliser un quai qui n’est pas adapté à ses particularités, augmentant les risques pour les personnes et le navire.
- Si les systèmes d’un treuil ne sont pas conçus selon les pratiques recommandées de conception ainsi que les principes d’ergonomie, il y a un risque d’augmentation du temps de réponse de la part des opérateurs et de la possibilité d’erreur en situation critique.
3.3 Autres faits établis
Ces éléments pourraient permettre d’améliorer la sécurité, de régler une controverse ou de fournir un point de données pour de futures études sur la sécurité.
- Lors de l’événement à l’étude, aucun marquage ni aucune signalisation des zones potentiellement dangereuses ou des zones de coup de fouet n’étaient apparents aux postes d’amarrage.
- Le jour de l’événement, le premier officier, le matelot au poste d’amarrage arrière ainsi qu’un des préposés aux amarres sur le quai ne portaient pas leurs casques de sécurité.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Bureau de la sécurité des transports du Canada
Le 26 octobre 2022, le BST a envoyé l’Avis sur la sécurité du transport maritime 03/22 Note de bas de page 30 à Transports Canada (TC) et à la Coopérative de Transport Maritime et Aérien (CTMA) concernant la sécurité lors des opérations d’amarrage et d’appareillage, particulièrement l’effet du phénomène appelé « coup de fouet » et le marquage des zones dangereuses sur les postes d’amarrage.
4.1.2 Transports Canada
À la suite de l’accident, un agent de santé et sécurité au travail de TC délégué par le Programme du travail a effectué une inspection dans le cadre de la partie II du Code canadien du travail et des mesures de conformité ont été prises. TC a exigé la mise en place de procédures d’amarrage du Madeleine II à Cap-aux-Meules (Québec) et à Souris (Île-du-Prince-Édouard).
4.1.3 La Coopérative de Transport Maritime et Aérien
À la suite de l’événement, la CTMA a examiné l’accident et a produit un rapport d’enquête interne qui comprenait les démarches suivantes :
- analyse de divers dossiers, documents, rapports et correspondances avec des intervenants concernés à l’égard du fonctionnement des treuils et de l’état des quais à Cap-aux-Meules;
- réunions avec les membres d’équipage pour discuter de l’incident et des mesures de sécurité à prendre;
- essais et analyses physiques des équipements sur le pont arrière du navire, notamment des tests de fonctionnement des treuils, et analyse de leurs guides et documents de soutien technique;
- mise à jour du système de gestion de la sécurité.
L’entreprise a également pris les mesures suivantes :
- Le 15 janvier 2022, à la suite d’une inspection de TC dans le cadre de la partie II du Code canadien du travail, la CTMA a affiché une procédure d’amarrage sur le Madeleine II à Cap-aux-Meules et à Souris. Selon cette procédure, l’ajout de la 2e garde montante arrière durant la phase dynamique a été temporairement arrêté et l’utilisation d’un remorqueur durant les accostages à Cap-aux-Meules a été exigée en tout temps.
- Le 13 mai 2022, la procédure a été révisée et l’utilisation du remorqueur est devenue requise lorsque le vent est supérieur à 25 nœuds.
- Le déploiement de la 2e garde montante est toujours suspendu lors de la phase dynamique au quai no 2.
- La CTMA a pris des mesures pour indiquer les zones dangereuses aux postes d’amarrage.
- Le 14 juillet 2022, la CTMA a ajouté un module de formation sur l’utilisation des treuils par l’équipage.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le . Le rapport a été officiellement publié le .