Perte de maîtrise et collision avec le relief
Springbank Air Training College
Piper PA-34-200T Seneca II (C-GCCM)
Aéroport de Calgary/Springbank (Alberta), 0,8 nm S
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 26 octobre 2017 à 9 h 49, heure avancée des Rocheuses, le Piper PA-34-200T Seneca II (numéro de série 34-7570103, immatriculé C-GCCM) du Springbank Air Training College a décollé de la piste 17 à l’aéroport de Calgary/Springbank (CYBW, Alberta). Un élève-pilote et un instructeur de vol se trouvaient à bord. Il s’agissait d’un vol d’entraînement multimoteur vers la zone d’exercice. Environ 70 secondes après le décollage, et à 0,8 mille marin au sud de la piste 17, l’aéronef a roulé à gauche, est entré en virage serré en piqué incliné à gauche, puis a percuté le relief. L’aéronef a été détruit par l’incendie qui a suivi l’écrasement. Les 2 occupants ont été mortellement blessés. La radiobalise de repérage d’urgence de 406 MHz ne s’est pas déclenchée. Des automobilistes qui circulaient sur la Transcanadienne non loin de là et qui ont été témoins de l’accident sont arrivés sur les lieux en moins de 1 minute.
This report is also available in English.
Renseignements de base
Déroulement du vol
Le 26 octobre 2017, un instructeur de vol du Springbank Air Training College (SATC) devait faire passer un pré-test en vol d'évaluation à un élève-pilote du SATC à l aéroport de Calgary/Springbank (CYBW) avant que celui-ci n'essaie de passer le véritable test en vol pour obtenir sa qualification multimoteur. Par conséquent, l'élève-pilote était accompagné d'un instructeur de vol autre que celui qui lui avait donné la plus grande part de sa formation multimoteur.
L'aéronef Piper PA-34-200T Seneca II (numéro de série 34-7570103, immatriculé C-GCCM) avait été réservé de 8 hNote de bas de page 1 à 10 h le 26 octobre 2017 pour cet exercice. L'instructeur examinateur est arrivé au hangar vers 9 h et a rencontré l'élève. Il a ensuite tenu un exposé prévol avec l'élève, puis l'évaluation a commencé.
À 9 h 33 min 50 s, l'autorisation de circuler au sol et de faire le point fixe a été demandée.
À 9 h 48 min 30 s, l'élève-pilote a circulé au sol vers la piste 17. À 9 h 48 min 41 s, il a accusé réception de l'autorisation de décoller.
D'après les données de surveillance du système de multilatération à couverture étendue (WAM) obtenues de NAV CANADA, à 9 h 49 min 40 s l'aéronef a décollé de la piste 17 à une vitesse estimée de 80 nœuds en vitesse corrigée (KCAS) et a amorcé sa montée initiale en suivant le cap de la piste. Le train d'atterrissage a ensuite été rentré. Environ 15 secondes après le décollage, l'aéronef a atteint une vitesse anémométrique maximale de 90 KCAS. Il a atteint une altitude maximale de 250 pieds au-dessus du niveau du sol (AGL) environ 40 secondes après le décollage. Toutefois, à ce stade, la vitesse anémométrique avait diminué à 70 KCAS, et la trajectoire de l'aéronef avait dévié de 10° vers la gauche du prolongement de l'axe de la piste. L'aéronef est ensuite revenu vers l'axe de piste, puis a continué le mouvement jusqu'à environ 5° à droite du prolongement de l'axe de la piste.
L'aéronef a poursuivi son vol pendant encore 30 secondes, à un taux de descente moyen de 200 pieds par minute (pi/min) et à une vitesse anémométrique juste en deçà de 70 KCAS. Durant cette période, l'instructeur de vol a demandé à la tour de Springbank l'autorisation d'effectuer immédiatement un circuit. Aucune situation d'urgence ou anormale n'a été déclarée.
L'aéronef a alors amorcé un virage serré descendant incliné à gauche, à environ 300 pieds au nord de lignes de transport d'hydroélectricité allant d'est en ouest. La vitesse anémométrique estimée a diminué à quelque 65 KCAS lorsque l'aéronef se trouvait à une altitude approximative de 100 pieds AGL (figure 1 et figure 2).
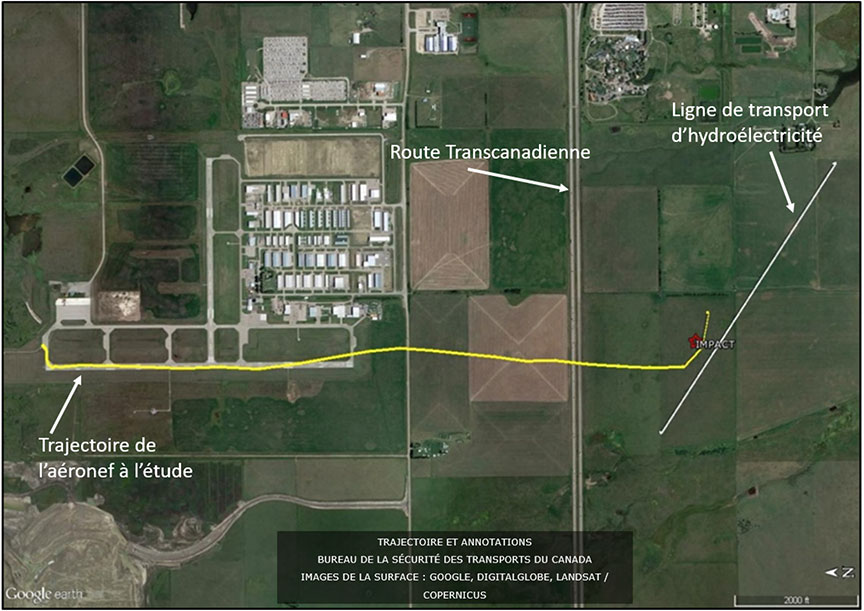
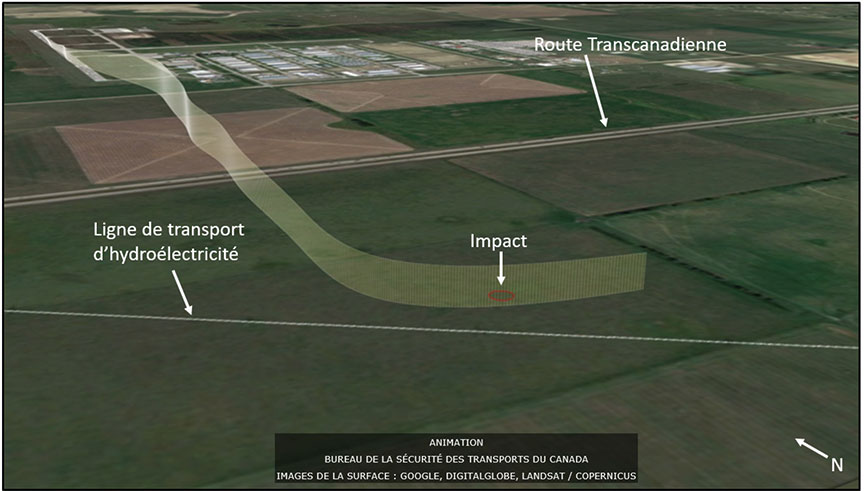
À 9 h 51 min 10 s, l'aéronef a percuté le relief à environ 0,8 mille marin (nm) au sud de la piste 17. Les 2 occupants ont été mortellement blessés. L'aéronef a été détruit et un violent incendie après impact s'est déclaré. La radiobalise de repérage d'urgence de 406 MHz ne s'est pas déclenchée.
Des automobilistes qui circulaient sur la Transcanadienne sous la trajectoire de vol de l'aéronef et qui ont été témoins de l'accident sont arrivés sur les lieux moins de 1 minute après l'écrasement.
Renseignements sur l'épave et sur l'impact
L'épave se trouvait à 0,8 nm au sud de l'extrémité départ de la piste 17, du côté sud de la route Transcanadienne, dans un pâturage à une altitude de 3918 pieds au-dessus du niveau de la mer (ASL). À la fin de la séquence d'impact, l'épave s'est immobilisée sur un cap de 183° magnétique (M). Les témoignages, les marques au sol et les dommages à l'aéronef correspondaient à un impact dans une assiette quasi verticale.
Tous les principaux composants de l'aéronef ont été retrouvés sur les lieux de l'accident. Un examen de l'épave a démontré qu'il n'y avait aucun signe de défaillance du système de commandes de vol ou de la cellule avant l'impact. L'incendie après impact a détruit le système avionique et les instruments moteur. L'aéronef a été détruit par l'incendie, à l'exception de l'empennage et des parties extérieures des ailes.
Les 2 hélices se trouvaient au lieu du premier impact, enfoncées à l'horizontale à quelque 10 à 12 pouces dans le sol, de même que le flasque de montage d'hélice qui s'était détaché du vilebrequin de chaque moteur. Les pales des hélices étaient réglées au petit pas. À partir des marques et caractéristiques d'impact sur les moteurs et les hélices, on a déterminé que les 2 moteurs fonctionnaient à bas régime au moment de l'impact.
L'examen initial sur place des moteurs n'a révélé aucun signe évident de défaillance. La cellule, les moteurs et les hélices ont été transportés aux installations du BST à Edmonton (Alberta) en vue d'un examen approfondi.
Des enquêteurs du BST, aidés par des enquêteurs de sécurité du constructeur, ont complètement démonté les 2 moteurs, les hélices et les turbocompresseurs aux installations du BST à Edmonton. On n'a relevé aucun signe de panne avant l'impact ni indice d'anomalie qui aurait empêché les circuits de fonctionner normalement.
La cellule a été examinée, dans la mesure du possible, ce qui a permis de confirmer que le train d'atterrissage était escamoté, les volets étaient rentrés et le système de commandes de vol ne montrait aucun signe de défaillance avant l'impact. Les robinets de sélection de réservoir carburant, situés dans leur aile respective, sont commandés par un câble. Ils ont été examinés au Laboratoire d'ingénierie du BST à Ottawa (Ontario). Étant donné les dommages causés à la cellule par l'impact et l'incendie qui a suivi, il a été impossible de déterminer leur position ou leur état avant l'impact.
L'aéronef avait été avitaillé à sa capacité maximale de 123 gallons américains au SATC le jour avant le vol à l'étude. On a prélevé un échantillon des réserves de carburant du SATC pour l'analyser. Le carburant s'est avéré conforme aux spécifications requises pour l'essence d'aviation 100LL. Tous les aéronefs du SATC sont avitaillés depuis ce réservoir, et aucun autre d'entre eux n'a subi d'anomalie opérationnelle imputable au carburant, avant ou après la date de l'événement.
Renseignements météorologiques
Au moment de l'accident, un système de haute pression plus ou moins centré au-dessus de Nanton (Alberta) influait sur les conditions météorologiques de la partie sud de l'Alberta. La prévision de zone graphiqueNote de bas de page 2 émise à 5 h 31 le jour de l'événement, valable de 6 h à 11 h 59, faisait état d'un ciel dégagé et d'une visibilité locale de 0,5 mille terrestre (sm) dans du brouillard givrant. On ne prévoyait ni turbulence ni condition givrante importante dans le secteur de CYBW. On a calculé que l'altitude-densité était à 2238 pieds ASL au moment de l'accident.
Le message d'observation météorologique régulière pour l'aviation (METAR) diffusé à 9 h pour CYBW faisait état des conditions suivantes :
- vents : 150° vrai (V) à 14 nœuds
- visibilité : 9 sm
- nuages épars à 21 000 pieds ASL
- température : −5 °C, point de rosée −6 °C
- calage altimétrique : 30,31 inHg
Le METAR diffusé à 10 h pour CYBW faisait état des conditions suivantes :
- vents : 160 °V à 12 nœuds
- visibilité : 9 sm
- ciel couvert à 20 000 pieds ASL
- température : −4 °C, point de rosée −5 °C
- calage altimétrique : 30,27 inHg
Renseignements sur l'aéronef
Le Piper PA-34-200T Seneca II est un aéronef tout aluminium à voilure basse. Il est muni de 2 moteurs Continental, un LTSIO-360 et un TSIO-360 à turbocompresseur, et d'un train d'atterrissage escamotable. Ce type d'aéronef est doté de moteurs à hélices contrarotatives pour écarter toute problématique de moteur critiqueNote de bas de page 3.
Au moment de l'accident, le SATC exploitait 2 Seneca II. L'aéronef en cause était le plus récent ajout à la flotte. Il avait été acquis plus tôt en 2017 aux États-Unis et immatriculé auprès de Transports Canada (TC) le 7 juillet 2017. L'importation a été conclue le 3 août 2017.
Les dossiers indiquent que l'aéronef était certifié, équipé et entretenu conformément aux règlements en vigueur et aux procédures approuvées. La plus récente inspection aux 100 heures avait été réalisée le 3 août 2017. Durant le vol, l'aéronef était exploité dans les limites approuvées de masse et de centrage, et sa masse au décollage était de 4226 livres.
L'aéronef était muni degénérateurs de tourbillons conformément au certificat de type supplémentaire (CTS) SA00109SE. Ces générateurs de tourbillons étaient installés sur les ailes et sur la dérive afin de permettre de réduire la vitesse minimale de contrôle (VMC) à 63 KCAS. Toutefois, étant donné l'environnement de formation au pilotage au SATC, l'établissement avait choisi d'exploiter l'aéronef selon la VMC plus élevée publiée sur le certificat de type d'origine, soit 70 KCAS. Cette différence de 7 nœuds de la vitesse anémométrique représentait une marge de sécurité.
La vitesse de décrochage de l'aéronef, à une masse de 4250 livres, les ailes à l'horizontale et les volets et le train d'atterrissage rentrés, est de 63 KCASNote de bas de page 4.
L'avion n'avait pas d'enregistreur de conversations de poste de pilotage (CVR) ni d'enregistreur de données de vol (FDR), et la réglementation n'en exigeait pas.
| Constructeur | Piper Aircraft Corporation |
|---|---|
| Type, modèle et immatriculation | PA-34-200T Seneca II (C-GCCM) |
| Année de construction | 1975 |
| Numéro de série | 34-7570103 |
| Certificat de navigabilité | 8 août 2017 |
| Total d'heures de vol cellule | 3915,5 heures |
| Type de moteur (nombre) | Teledyne Continental TSIO/LTSIO 360-E (2) |
| Type d'hélice (nombre) | Hartzell PHC-C3YF-2KUF/2LKUF (2) |
| Masse maximale autorisée au décollage | 4750 livres |
| Type de carburant recommandé | Essence d'aviation 100/130 |
| Type de carburant utilisé | Essence d'aviation 100LL |
Renseignements sur le personnel
Généralités
D'après les dossiers, l'instructeur et l'élève possédaient les licences et les qualifications nécessaires au vol en vertu de la réglementation en vigueur. Selon l'enquête, rien n'indique que des facteurs physiologiques aient pu nuire au rendement des pilotes.
| Instructeur | Élève | |
| Licence de pilote | Licence de pilote professionnel | Licence de pilote privé |
| Date d'expiration du certificat médical | 1er juin 2018 | 1er avril 2022 |
| Heures de vol – total | 2167,0 | 175,6 |
| Heures de vol sur type | 141,5 | 5,7 |
| Heures de vol au cours des 7 derniers jours | 0 | 1,7 |
| Heures de vol au cours des 30 derniers jours | 23,2 | 10,2 |
| Heures de vol au cours des 90 derniers jours | 37,5 | 29,2 |
| Heures de vol sur type au cours des 90 derniers jours | 30,0 | 5,7 |
| Heures de service avant l'événement | 1 | 2 |
| Jours de congé avant la période de travail | 14 | 5 |
Instructeur
L'instructeur travaillait pour le SATC depuis le 23 mai 2012. Il était titulaire d'une licence de pilote professionnel avec les qualifications multimoteur et instructeur de classe 3, ainsi qu'un certificat médical de catégorie 1 valide. Au moment de l'accident, l'instructeur avait 2167 heures de temps de vol à son actif, dont 175 sur multimoteur, et 141,5 sur le Seneca II. Il comptait 1050 heures de vol comme instructeur. Son dernier vol d'évaluation pour le SATC sur le Piper Seneca II remontait à janvier 2017.
Élève
L'élève avait entrepris sa formation au pilotage au SATC le 9 mars 2016 et avait obtenu son permis d'élève-pilote le 13 mai 2016. Au moment de l'accident, il était titulaire d'une licence de pilote privé et d'un certificat médical de catégorie 1 valide. Il cumulait au total 175,6 heures de vol. L'élève-pilote avait réussi le test en vol de pilote professionnel le 3 août 2017, mais n'avait pas encore effectué la totalité des 200 heures de vol nécessaires pour obtenir une licence de pilote professionnel. L'élève-pilote avait accumulé 5,7 heures de vol sur le Seneca II en vue d'obtenir la qualification multimoteur.
Renseignements sur les organismes et sur la gestion
Springbank Air Training College
Le SATC est une école de pilotage autorisée par TC qui détient un certificat d'exploitation d'unité de formation au pilotage valide assujetti à la sous-partie 406 du Règlement de l'aviation canadien (RAC).Fondée en 1999, l'école est établie à CYBW et y mène ses activités. On y offre la formation nécessaire pour obtenir des licences et des qualifications canadiennes de pilote. Au moment de l'événement, outre les 2 Seneca II, la flotte d'aéronefs d'entraînement du SATC comprenait plusieurs Cessna 172 et 1 Cessna 182.
Manuels et procédures du Springbank Air Training College
Avant le 2 octobre 2017, le SATC avait combiné ses procédures d'utilisation normalisées (SOP), son manuel d'exploitation (FOM) et son manuel de formation en 1 seul documentNote de bas de page 5.
Pour ce qui est des exercices d'entraînement aux pannes moteur, le document stipulait ceci [traduction] :
On doit s'entraîner aux pannes moteur en vol de croisière et durant la remise des gaz à une hauteur d'au moins 2500 pieds AGL. L'instructeur décide de l'altitude à laquelle les pannes moteur auront lieu dans le circuit et durant l'approcheNote de bas de page 6.
Cependant, l'enquête a permis de déterminer que les instructeurs du SATC suivaient également des lignes directrices provenant de 2 publications connexes de TCNote de bas de page 7,Note de bas de page 8. D'après ces documents d'orientation, les altitudes minimales recommandées pour s'entraîner et tester une simulation de panne moteur au décollage ou durant la remise des gaz sont de 500 pieds AGL et de 2000 pieds AGL, respectivement.
Le 2 octobre 2017, le SATC a publié séparément les manuels qui auparavant étaient publiés ensemble. Ce changement a entraîné la création d'un manuel de formation au pilotage et de nouvelles SOP. En outre, 3 SOP distinctes ont été mises en place pour tenir compte de chacun des types d'aéronefs qu'exploitait l'école de pilotage. Une d'elles portait sur le Seneca II. La conception et la publication des SOP du PA-34 avaient été officialisées par des instructeurs sur multimoteur et des rencontres de groupe.
On a envoyé un courriel aux membres du personnel qui exploitait les aéronefs du SATC pour les informer de la prise d'effet de ces nouveaux documents. Tous les utilisateurs devaient lire les nouveaux documents et signer une déclaration à cet effet. Les 2 pilotes dans l'événement à l'étude avaient signé cette déclaration.
La seule directive du nouveau manuel de formation au pilotage relative aux altitudes sécuritaires pour simuler des situations d'urgence précisait seulement que [traduction] : « Les instructeurs doivent exercer leur discrétion lorsqu'ils effectuent ces exercices [...]Note de bas de page 9. »
Les nouvelles SOP du Seneca contenaient les directives suivantes en ce qui concerne les altitudes sécuritaires pour la conduite des situations d'urgence simulées [traduction] : « Une panne de moteur simulée peut être effectuée à n'importe quelle altitude au-dessus de 500 pieds AGL.Note de bas de page 10 » On y aborde également les pannes de moteur simulées en croisière ou en approche. Les SOP ne contenaient pas d'instructions sur les pannes moteur simulées au décollage.
Programme de formation au pilotage multimoteur
Les élèves inscrits au programme de formation au pilotage multimoteur du SATC reçoivent 11 leçons sur les multimoteurs qui comprennent en tout 12,8 heures de temps de vol en double commande sur le Seneca II et 8,2 heures d'exposés au sol. En outre, le test en vol multimoteur exige environ 2 heures additionnelles en vol et au sol.
Le vol à l'étude était la leçon 11, qui est une simulation du test en vol multimoteur, en compagnie d'un instructeur de vol autre que l'instructeur attitré de l'élève. La leçon 11 est normalement la dernière avant le test en vol réel. Le manuel de formation au pilotage en vigueur à l'époque contenait un plan de cours de la leçon 11, qui couvrait des exercices de panne moteur uniquement durant le vol de croisière, la remise des gaz, et l'approche et l'atterrissage. Aucune documentation de TC ou du SATC n'exigeait de simuler ou de tester une panne d'un seul moteur durant le décollage.
L'enquête a permis d'établir qu'à 2 reprises au moins, l'instructeur en cause avait simulé des pannes moteur au décollage. À ces occasions, la panne moteur avait été simulée juste après que le train d'atterrissage fut rentré; normalement, l'altitude de l'aéronef aurait été de 100 à 200 pieds AGL.
Procédures et performances
Généralités
Compte tenu du manuel d'utilisation du Piper PA-34-200T, de la masse de l'aéronef et des conditions atmosphériques au moment de l'événement, l'aéronef aurait requis une course au décollage de 850 pieds et une distance de 1160 pieds pour franchir un obstacle de 50 pieds de hautNote de bas de page 11.
En fonction de la masse brute au décollage de l'aéronef et des conditions atmosphériques au moment de l'événement, la performance en montée de l'aéronef aurait été de 1280 pi/min pour une montée à 2 moteurs, et de 210 pi/min pour une montée à un seul moteurNote de bas de page 12.
Procédure normale de décollage et de montée du Springbank Air Training College
Les SOP du SATC pour le PA-34-200T décrivent les réglages de puissance suivants pour une montée normale [traduction] :
Les décollages normaux à des altitudes inférieures à 12 000 pieds s'effectuent en deçà du plein régime. Régler les manettes des gaz seulement de manière à obtenir une pression d'admission [MP] de 35 pouces. NE PAS DÉPASSER 40 pouces MPNote de bas de page 13.
Toujours d'après les SOP, pour une montée normale [traduction] :
Au-dessus de 400 pieds AGL ou de la hauteur de franchissement d'obstacle, selon la plus élevée des deux, une montée normale s'effectue avec les volets rentrés et à la puissance de montée (MP de 31,5 pouces et 2450 tr/min) à une vitesse anémométrique de 102 KIAS [vitesse indiquée en nœuds]. Ces réglages procurent la meilleure combinaison de performance de l'aéronef, de refroidissement du moteur et de visibilité. Lorsqu'il établit l'aéronef dans une montée à n'importe quel stade d'un vol, le pilote aux commandes doit toujours appliquer la puissance dans l'ordre suivant : mélange, hélice et puissanceNote de bas de page 14.
Définitions des vitesses anémométriques
Le Guide de l'instructeur – Qualification sur multimoteurs (TP 11575) de TC contient les définitions suivantes concernant l'exploitation d'aéronefs multimoteurs :
- VMC
Vitesse minimale de contrôle — vitesse minimale nécessaire, suite à une panne soudaine du moteur critique, pour conserver la maîtrise de l'avion et le maintenir en vol rectiligne en braquant le gouvernail de direction au maximum et sans que l'inclinaison latérale dépasse 5°.
REMARQUE 1 : La VMC pour un type d'avion donné est généralement déterminée dans les conditions suivantes :
- tous les moteurs fonctionnent à la puissance maximale lors d'une panne du moteur critique;
- l'avion est à la masse minimale pratique avec un centrage arrière maximal;
- le train d'atterrissage est rentré, les volets sont en position de décollage et l'hélice du moteur critique en panne tourne en moulinet.
REMARQUE 2 : Aux vitesses inférieures à la VMC, l'avion s'engagera en lacet et s'inclinera du côté du moteur en panne. Rappelons qu'on ne maîtrisera à nouveau l'avion qu'en réduisant la puissance du moteur en marche ou en augmentant la vitesse en changeant l'assiette de l'avion, ou les deux.
Consulter la circulaire d'information AC 23-8B – Flight Test Guide for Certification of Part 23 Airplanes sur le site Web suivant : http://www.airweb.faa.gov/Regulatory_and_Guidance_Library/rgAdvisoryCircular.nsf/MainFrame?OpenFrameSet [...]
- VSSE
- Vitesse avec un moteur intentionnellement coupé — (vitesse de sécurité sur un seul moteur) vitesse supérieure à la fois à la vitesse minimale de contrôle (VMC) et à la vitesse de décrochage qui est choisie en vue de fournir une certaine marge de maîtrise latérale et longitudinale avant que ne soit coupé soudainement un moteur. Il est déconseillé de couper intentionnellement un moteur à une vitesse inférieure. [...]
- VYSE
- Vitesse correspondant à la vitesse ascensionnelle maximale avec un moteur coupé — vitesse procurant le plus fort gain d'altitude pour un temps donné avec un moteur en panneNote de bas de page 15.
Roulis à la vitesse minimale de contrôle (VMC)
Un roulis VMC est un roulis rapide à une vitesse inférieure à VMC. Il est le résultat d'un contrôle en lacet insuffisant pour contrer la traction que génère le moteur opérant. Une application soudaine de puissance au moteur opérant accélérera toute condition imminente de roulis VMC. À ce stade, l'aéronef roule rapidement dans le sens du moteur inopérant.
Procédures en cas de panne moteur
Le manuel de vol contient la procédure d'urgence suivante pour mettre les hélices en drapeau en cas de panne moteur en vol dans une situation où il n'est pas indiqué de rétablir la puissance [traduction] :
- Vitesse minimale de contrôle – 80 MI/H [VMC 70 KCAS]
- Vitesse ascensionnelle maximale avec un moteur coupé – 105 MI/H
[VYSE 91 KCAS]- Maintenir la direction et la vitesse anémométrique au-dessus de 90 MI/H [VSSE 78 KCAS]
- Commandes de mélange air/carburant – en avant
- Commandes d'hélices – en avant
- Manettes des gaz – en avant (ne pas dépasser une pression d'admission de 40 po)
- Volets – rentrés
- Train d'atterrissage – rentré
- Déterminer quel moteur est inopérant
- Manette des gaz du moteur inopérant – reculer pour vérifier
- Mélange air/carburant du moteur inopérant – position étouffoir
- Hélice du moteur inopérant – en drapeauNote de bas de page 16
Le manuel de vol contient également la procédure d'urgence suivante en cas de panne moteur durant la montée [traduction] :
- Si une panne moteur survient tandis que la vitesse anémométrique est inférieure à 80 mi/h (VC) [vitesse calibrée] [70 KCAS], réduire la puissance du moteur opérant de manière à maintenir la maîtrise en direction. Réduire l'assiette en cabré pour accélérer vers la vitesse ascensionnelle maximale avec un moteur coupé de 105 mi/h [91 KCAS]. Mettre ensuite en drapeau l'hélice du moteur inopérant (voir la procédure de mise en drapeau)Note de bas de page 17.
Les SOP du SATC pour le PA-34-200T décrivaient la procédure suivante en cas de panne moteur après le décollage [traduction] :
Maintenir la maîtrise en direction au moyen de la gouverne de direction, et incliner l'aéronef du côté du moteur opérant. S'assurer d'appliquer la puissance maximale au moteur opérant (MP de 40 pouces). Repérer et vérifier le moteur en panne et achever la procédure le plus tôt possible. Le moteur en moulinet produit une forte traînée aérodynamique. Plus tôt on mettra l'hélice en drapeau, meilleure sera la montée de l'aéronef. On doit immédiatement effectuer la procédure; toutefois, on ne doit rien faire avant d'avoir dépassé 400 pieds d'altitude ou la hauteur de franchissement d'obstacle, selon la plus élevée des deux. Une fois au-dessus de 400 pieds ou de la hauteur de franchissement d'obstacle, informer l'ATC [contrôle de la circulation aérienne] de l'urgence et lui demander de se tenir prêt. Une fois l'altitude sécuritaire atteinte (env. 1000 pieds AAE [altitude au-dessus de l'aérodrome]), achever la liste de vérification et informer l'ATCNote de bas de page 18.
Dans le cas d'exercices de simulation avec un seul moteur opérant, on règle le moteur « inopérant » à 1900 tr/min et à une pression d'admission de 19 pouces pour imiter une hélice en drapeau.
Analyse des données de surveillance du système de multilatération à couverture étendue
Généralités
Le Laboratoire d'ingénierie du BST a analysé les données de surveillance WAM de NAV CANADA relatives au vol à l'étude. Les données WAM sont générées par de l'équipement qui fournit aux contrôleurs de la circulation aérienne des données de position d'aéronef semblables aux données radar. On a répété l'analyse en se servant des données WAM d'un vol antérieur réalisé avec l'aéronef en cause, le 21 octobre 2017. On a ensuite reporté sur un diagramme les résultats des 2 vols pour les comparer (annexe A). Il y a toutefois une importante marge d'erreur, étant donné les limites des données de surveillance.
Comparaison de décollages
Une comparaison du décollage en cause au décollage du vol antérieur (21 octobre) indique une importante différence de performance. La vitesse anémométrique durant la montée initiale pour le vol antérieur était supérieure d'environ 25 % à celle du vol à l'étude (100 KCAS comparativement à 80 KCAS) et elle s'est maintenue, tandis que durant le vol à l'étude, la vitesse a commencé à diminuer vers 70 KCAS.
Durant le vol antérieur, la vitesse ascensionnelle maximale était de presque 3 fois celle du vol à l'étude (1100 pi/min comparativement à 400 pi/min); le vol antérieur a poursuivi sa montée à environ 700 pi/min. À l'opposé, le vol à l'étude perdait de l'altitude à raison de 200 pi/min, soit un déficit relatif d'environ 900 pi/min.
On a répété l'analyse à partir des données du système mondial de positionnement pour navigation satellite (GPS) pour des décollages de l'autre Seneca II du SATC qui ont eu lieu les 17 et 22 mars 2018Note de bas de page 19. La comparaison des données a révélé des vitesses de décollage semblables à celles du vol à l'étude. On a également constaté une vitesse ascensionnelle plus élevée pour l'autre Seneca II, qui variait de 500 pi/min à 1000 pi/min, avant de se stabiliser à environ 600 pi/min. Le vol du 22 mars 2018 montrait des vitesses ascensionnelles encore plus élevées.
La vitesse ascensionnelle relativement faible durant le vol à l'étude laisse croire que la traction était inférieure à la normale. La puissance totale estimée après le décollage lors du vol à l'étude était nettement inférieure (aussi peu que le tiers) à celle des vols auxquels on l'a comparée.
Comparaison de l'altitude maximale et de la descente
La puissance estimée durant le vol antérieur de l'aéronef à l'étude et des vols du second Seneca II du SATC est demeurée relativement stable durant leurs montées; dans le vol à l'étude, la puissance estimée a diminué vers le minimum environ dans les 30 secondes qui ont suivi le décollage, et elle est demeurée à ce niveau jusqu'à la collision avec le relief.
Durant le vol à l'étude, l'aéronef a effectué une descente graduelle depuis une hauteur maximale de quelque 250 pieds AGL. Sa vitesse moyenne était de 70 KCAS et a diminué à environ 65 KCAS dans le virage, avec un taux de descente de 200 pi/min. Ces valeurs indiquent un ratio de descente d'environ 35:1. Ce ratio estimé est considérablement plus élevé qu'il ne le serait normalement pour ce type d'aéronef en descente avec une traction nulle (en planant), ce qui pourrait signifier que le moteur produisait toujours de la traction (annexe A).
La vitesse estimée durant le virage était égale ou inférieure à la VMC publiée dans le manuel de vol (70 KCAS). Elle n'aurait laissé que peu ou pas de marge au-dessus de la VMC publiée dans le supplément au manuel d'utilisation pour le CTS mis en place (63 KCAS).
Recommandation du BST sur les enregistreurs de bord
Le BST a enquêté sur un événementNote de bas de page 20 au cours duquel un Mitsubishi MU-2B-60 privé a percuté le relief durant le segment d'approche finale à l'aéroport des Îles-de-la-Madeleine (Québec). Les 7 occupants ont été mortellement blessés. Quoique la réglementation ne l'exigeait pas, cet aéronef avait à son bord un système FDR léger. Comme on a pu récupérer l'enregistreur et en extraire les données pour les analyser, les enquêteurs ont mieux compris le déroulement des événements qui ont mené à la perte de maîtrise de l'aéronef. Sans système d'enregistrement à bord, les enquêteurs n'auraient pas obtenu ces renseignements cruciaux à la compréhension des circonstances et des faits qui ont mené à cet événement.
Le BST a enquêté sur un autre événement, concernant un Cessna Citation 500 privéNote de bas de page 21. Le pilote a perdu la maîtrise de l'aéronef et a percuté le relief; les 4 occupants ont perdu la vie. Comme cet aéronef n'était muni d'aucun type de FDR ou de CVR, l'absence de toute donnée de vol a empêché les enquêteurs de déterminer et de comprendre le déroulement précis des événements de cet accident, ses causes sous-jacentes et les facteurs contributifs. L'enquête n'a pas pu déterminer ce qui a entraîné la perte de maîtrise de l'aéronef et la collision avec le relief.
Selon les conclusions de l'enquête sur l'accident du Cessna Citation 500, il est évident que l'absence d'enregistreurs à bord d'aéronefs commerciaux et privés assujettis à la sous-partie 604 du RAC continue de nuire à la capacité du BST de promouvoir la sécurité des transports. En conséquence, le Bureau a recommandé que :
le ministère des Transports oblige l'installation de systèmes d'enregistrement des données de vol légers chez les exploitants commerciaux et exploitants privés qui n'y sont pas actuellement tenus.Recommandation A18-01 du BST
Dans sa réponse à la recommandation A18-01, TC a indiqué qu'il était en partie d'accord avec la recommandation A18-01 et qu'il entreprendrait une analyse stratégique de la gestion des données de vol. Deux approches ont été établies :
- l'installation volontaire de FDR et de systèmes d'enregistrement des données de vol légers (LDR) et la publication d'une circulaire d'information et aide aux exploitants
- l'adoption possible de règlements sur l'installation de FDR et de LDR dans les aéronefs nouvellement construits. TC a indiqué qu'il devait encore établir quels secteurs du transport aérien canadien seraient assujettis à cette exigence de certification. Il a également indiqué que toutes les exigences de certification seraient obligatoirement et parfaitement conformes à la norme ED-155, Minimum Operational Performance Specification for Lightweight Flight Recording Systems, de l'Organisation européenne pour l'équipement de l'aviation civile, qui est citée à l'annexe 6 de l'Organisation de l'aviation civile internationale.
TC a indiqué qu'il réexaminerait ces 2 approches en évaluant le nombre d'exploitants ayant volontairement adopté les systèmes de suivi des données de vol. Si les résultats de l'approche volontaire s'avéraient insuffisants, d'autres mesures, y compris une solution réglementaire, seraient envisagées.
TC a l'intention de continuer de travailler avec le secteur afin d'élaborer des pratiques recommandées et d'établir les principaux obstacles entravant l'adoption et l'installation des systèmes d'enregistrement des données de vol.
En plus de la réponse de TC, le BST a reçu des renseignements de l'Association canadienne de l'aviation d'affaires (ACAA) au sujet des mesures prises après la publication de la recommandation A18-01. Dans sa lettre, l'ACAA a informé le BST qu'elle continuerait de promouvoir l'installation des FDR ainsi que l'analyse des données issues de ces dispositifs dans le cadre de son programme Partners-in-Safety. L'ACAA a également signé une entente avec un fournisseur afin d'offrir à ses membres des services d'analyse des données de vol. Enfin, l'ACAA a informé le BST qu'elle appuierait une approche réglementaire imposant l'installation de FDR dans les aéronefs privés si cette mesure était corroborée par une analyse coûts-avantages. Elle a toutefois fait remarquer que la mise à niveau des aéronefs d'affaires n'était pas toujours possible à cause des coûts et des contraintes techniques.
Le Bureau sait gré à TC de s'engager à travailler avec le secteur pour promouvoir l'installation volontaire des FDR et des systèmes LDR dans les aéronefs canadiens qui ne sont pas assujettis aux exigences actuelles du RAC. Toutefois, aucun échéancier précis n'a été fourni pour les mesures proposées. Bien qu'une fois mises en œuvre, ces mesures puissent atténuer le risque, d'ici à ce que TC transmette au BST un plan d'action plus détaillé, on ignore quand et dans quelle mesure la lacune de sécurité soulevée dans la recommandation A18-01 sera corrigée.
Par conséquent, le Bureau estime que la réponse à la recommandation A18-01 dénote une attention en partie satisfaisante.
L'accident du Seneca II du SATC met en évidence l'importance des renseignements enregistrés pour déterminer les causes d'un accident.
Rapports de laboratoire du BST
Le BST a produit le rapport de laboratoire suivant dans le cadre de la présente enquête :
- LP009/2018 – Radar Data Analysis [analyse des données radar]
Analyse
L'aéronef a été détruit par le choc et par l'incendie qui a suivi; par conséquent, on n'a pas pu déterminer si une défaillance ou un mauvais fonctionnement d'un système avant l'impact avait été un facteur dans l'accident. Toutefois, les composants qui ont été examinés n'ont révélé aucun signe de mauvais fonctionnement.
Aucun signal de la radiobalise de repérage d'urgence de 406 MHz n'a été détecté. Étant donné les dommages causés par l'incendie après l'écrasement, l'enquête n'a pas pu en déterminer la raison.
Étant donné l'absence d'enregistreur de conversations de poste de pilotage ou de données de vol, les enquêteurs n'ont pas pu déterminer les mesures prises par les pilotes ni la cause précise de l'accident. L'analyse portera donc sur la performance de l'aéronef durant la phase de décollage du vol et les scénarios possibles de perte de maîtrise et de collision avec le relief.
Scénario de panne moteur simulée
Après que l'aéronef eut décollé, il n'a pas suivi le profil de montée normal en exploitation multimoteur ou avec un moteur coupé, puis il a amorcé une descente. L'aéronef a atteint la vitesse ascensionnelle maximale avec un moteur coupé (VYSE), mais seulement momentanément, puis la vitesse a lentement diminué, jusqu'à la vitesse minimale de contrôle (VMC).
La piste radar montre la déviation de l'aéronef vers la gauche du prolongement de l'axe de la piste, ce qui correspondrait à une réduction de puissance du moteur gauche. La piste radar montre également que l'aéronef est revenu vers le prolongement de l'axe de la piste, signe d'une certaine maîtrise de l'aéronef.
Même si les enquêteurs disposaient de peu de renseignements, il y en avait suffisamment pour indiquer que le scénario le plus probable avant la perte de maîtrise est une simulation intentionnelle de panne moteur. Cette conclusion est étayée par les faits suivants :
- L'évaluation avant le test en vol devait comprendre divers scénarios de panne moteur, y compris une panne moteur durant le vol de croisière, la remise des gaz et l'approche et l'atterrissage.
- L'instructeur de vol avait simulé des pannes moteur peu après le décollage au cours de vols d'entraînement antérieurs.
- La performance de l'aéronef en montée était déficiente.
- La piste radar montre la déviation de l'aéronef vers la gauche du prolongement de l'axe de la piste, ce qui correspondrait à une réduction de puissance du moteur gauche.
- Ni l'un ni l'autre pilote n'a déclaré de situation d'urgence ou anormale à la tour de contrôle de Springbank.
- L'examen technique des 2 moteurs n'a révélé aucun mode de défaillance avant l'impact qui les aurait empêchés de développer la puissance optimale.
Scénario de décrochage
On a envisagé le scénario d'un décrochage, étant donné que la vitesse de décrochage et la VMC pour la configuration de l'aéronef étaient identiques, soit 63 nœuds en vitesse corrigée (KCAS). Cependant, les caractéristiques des dernières étapes du vol à l'étude correspondraient à l'amorce d'un roulis VMC plutôt qu'à un décrochage aérodynamique. Plus précisément,
- la trajectoire initiale après le décollage a dévié vers l'est, ce qui indiquerait une simulation probable d'une panne du moteur gauche entraînant un état de puissance asymétrique;
- l'absence de dommages aux pales d'hélices et les indications de bas régime;
- les renseignements sur l'épave, les déclarations des témoins oculaires et l'analyse des données du système de multilatération à couverture étendue indiquant que l'aéronef a soudainement effectué un virage ou un roulis abrupt dans une assiette en piqué.
Réaction à la panne moteur simulée
La piètre performance en montée et la réduction de la vitesse anémométrique indiqueraient que le moteur opérant n'a pas été réglé à la puissance maximale continue. La procédure de décollage normale du Springbank Air Training College est de régler la puissance à une pression d'admission de 35 pouces, puis, peu après l'escamotage du train d'atterrissage et l'établissement de la montée, de la réduire encore à une pression d'admission de 31,5 pouces. En cas de panne moteur réelle ou simulée à ce stade, on doit augmenter la puissance du moteur opérant à une pression d'admission de 40 pouces pour obtenir une vitesse ascensionnelle nette et maintenir la VYSE.
D'après la procédure d'urgence en cas de panne moteur, le pilote doit : maintenir la maîtrise en direction; configurer l'aéronef à la puissance maximale continue; réduire la traînée aérodynamique en rentrant les volets et le train d'atterrissage et en mettant l'hélice en drapeau. Dans le cas d'un exercice, on simule une mise en drapeau en réglant le moteur « inopérant » à 1900 tr/min et à une pression d'admission de 19 pouces.
Il est probable qu'on simulait une panne du moteur gauche au décollage. Il semble que, lors de cet exercice, le moteur droit n'ait pas été réglé à la puissance maximale afin que l'aéronef atteigne la vitesse ascensionnelle optimale avec un moteur coupé (VYSE) et une vitesse ascensionnelle nette. L'enquête n'a pas permis de déterminer pourquoi le moteur n'aurait pas été réglé à la puissance maximale.
Pour des motifs inconnus, la vitesse anémométrique a diminué sous la vitesse avec un moteur intentionnellement coupé (VSSE) jusqu'à la VMC, ce qui a entraîné la perte de maîtrise de l'aéronef et sa collision avec le relief.
L'absence de dommages aux pales d'hélices et les indications de bas régime dans les moteurs correspondraient à des moteurs fonctionnant à faible puissance au moment de l'impact. La première mesure à prendre pour sortir d'un roulis VMC est de réduire la puissance au ralenti de vol.
L'état de puissance asymétrique causé par la simulation d'une panne du moteur gauche à la VMC aurait entraîné un roulis VMC à une hauteur à laquelle les pilotes n'auraient pas pu reprendre la maîtrise de l'aéronef avant la collision avec le relief.
Si on simule des pannes moteur à basse altitude, il y a un risque que les pilotes ne puissent pas rétablir l'aéronef en cas de perte de maîtrise.
Faits établis
Faits établis quant aux causes et aux facteurs contributifs
- Il est probable qu'on simulait une panne du moteur gauche au décollage. Il semble qu'au moment de cet exercice, le moteur droit n'ait pas été réglé à la puissance maximale afin que l'aéronef atteigne la vitesse ascensionnelle optimale avec un moteur coupé (VYSE) et une vitesse ascensionnelle nette. L'enquête n'a pas permis de déterminer pourquoi le moteur n'aurait pas été réglé à la puissance maximale.
- Pour des motifs inconnus, la vitesse anémométrique a diminué sous la vitesse avec un moteur intentionnellement coupé (VSSE) jusqu'à la vitesse minimale de contrôle (VMC), ce qui a entraîné la perte de maîtrise de l'aéronef et sa collision avec le relief.
- L'état de puissance asymétrique causé par la simulation d'une panne du moteur gauche à la VMC aurait entraîné un roulis VMC à une hauteur à laquelle les pilotes n'auraient pas pu reprendre la maîtrise de l'aéronef avant la collision avec le relief.
Faits établis quant aux risques
- Si on simule des pannes moteur à basse altitude, il y a un risque que les pilotes ne puissent pas rétablir l'aéronef en cas de perte de maîtrise.
Mesures de sécurité
Mesures de sécurité prises
Springbank Air Training College
En décembre 2017, le Springbank Air Training College a publié une mise à jour des procédures d'utilisation normalisées (SOP)Note de bas de page 22 stipulant :
- des altitudes minimales auxquelles on peut amorcer des exercices de simulation d'une panne moteur;
- des procédures pour la simulation d'une panne moteur après le décollage;
- des procédures pour la simulation d'une panne d'un seul moteur durant le segment d'approche.
Ces SOP spécifient les altitudes minimales auxquelles on peut amorcer les diverses simulations de panne moteur (tableau 3).
| Exercice de simulation d'une panne moteur | Altitude minimale d'amorce (en pieds au-dessus du sol) |
|---|---|
| Panne moteur durant le circuit (vent arrière et approche) | 500 |
| Panne moteur durant la montée | 1500 |
| Panne moteur après le décollage | 3000 |
| Panne moteur durant la remise des gaz | 3000 |
| Démonstration de la vitesse minimale de contrôle (VMC) | 3500 |
Source: Springbank Air Training College, PA-34-200T Standard Operating Procedures, révision 1.2 (prise d'effet le 13 décembre 2017), p. 74.
Le présent rapport conclut l'enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le 15 novembre 2018. Le rapport a été officiellement publié le 21 novembre 2018.
Annexes
Annexe A – Comparaison des données de vol
