Sortie en bout de piste
Pilatus PC-12/47E, C-GIOX
Airmédic Inc.
Aéroport de Sept-Îles (Québec)
Le Bureau de la sécurité des transports du Canada (BST) a enquêté sur cet événement dans le but de promouvoir la sécurité des transports. Le Bureau n’est pas habilité à attribuer ni à déterminer les responsabilités civiles ou pénales. Le présent rapport n’est pas créé pour être utilisé dans le contexte d’une procédure judiciaire, disciplinaire ou autre. Voir Propriété et utilisation du contenu. Les pronoms et les titres de poste masculins peuvent être utilisés pour désigner tous les genres afin de respecter la Loi sur le Bureau canadien d’enquête sur les accidents de transport et de la sécurité des transports (L.C. 1989, ch. 3).
Résumé
Le 12 septembre 2021, l’aéronef Pilatus PC-12/47E (immatriculation C-GIOX, numéro de série 1237) exploité par Airmédic Inc. effectuait le vol AM237 selon les règles de vol aux instruments depuis l'aéroport international de Québec/Jean Lesage (Québec) à destination de l’aéroport de Sept-Îles (Québec) avec uniquement 2 membres d'équipage à bord. Lors de l’approche finale vers la piste 09 à l’aéroport de Sept-Îles, la vitesse indiquée de l’aéronef à 1,6 mille marin du seuil de la piste était de 242 nœuds. L’aéronef a franchi le seuil de piste à 200 pieds au-dessus du sol, à une vitesse indiquée de 180 nœuds (vitesse sol de 191 nœuds); son taux de descente était de 2000 pi/min, le train d’atterrissage était en transit et les volets étaient entièrement rentrés.
À 17 h 09, heure avancée de l'Est, l’aéronef s’est posé à environ 2525 pieds au-delà du seuil de la piste 09, qui était mouillée, à une vitesse indiquée de 159 nœuds. Environ 20 secondes plus tard, l’aéronef a fait une sortie en bout de piste à une vitesse sol de 57 nœuds, a parcouru environ 590 pieds dans l’herbe avant d’amorcer un virage à droite autour d’un feu d’approche puis de revenir sur la piste. Personne n’a été blessé. L’aéronef n’a subi aucun dommage.
1.0 Renseignements de base
1.1 Déroulement du vol
Le 12 septembre 2021, les 2 pilotes de l’aéronef Pilatus PC-12/47E (PC-12 NG) exploité par Airmédic Inc. (Airmedic) se sont rendus à l’aéroport de Montréal/St-Hubert (CYHU) (Québec) pour leur journée de travail débutant à 6 hNote de bas de page 1. Ils devaient effectuer cette journée-là une série de 5 vols entre 6 aéroports au Québec (figure 1).

Les vols suivants étaient prévus dans l’ordre :
- de CYHU à l’aéroport de Chevery (CYHR);
- de CYHR à l’aéroport de Natashquan (CYNA);
- de CYNA à l’aéroport international de Québec/Jean Lesage (CYQB);
- de CYQB à l’aéroport de Sept-Îles (CYZV);
- de CYZV à l’aéroport de La Romaine (CTT5).
Le départ du premier vol de la journée (de CYHU) était prévu à 7 h et l’arrivée du dernier vol (à CTT5) était prévue à 17 h 45. À 6 h 57, l’équipage a amorcé la série de vols sous l’indicatif AM237. Les 3 premiers vols se sont déroulés sans encombre. L’aéronef s’est posé à CYQB à 13 h 46.
À 16 h, l’aéronef a décollé de CYQB à destination de CYZV sans passager à bord. Le commandant de bord occupait le siège de gauche et était le pilote aux commandes (PF). Le premier officier (P/O) occupait le siège de droite et était le pilote non aux commandes (PNF).
Un peu avant d’entamer la descente à partir du niveau de vol 270, l’équipage a débuté sa préparation en vue de l’approche et de l’atterrissage à CYZV. Le commandant a informé le P/O qu’il allait lui montrer qu’il était possible de faire une descente tardive à un taux de descente d’environ 3000 pi/min avec le Pilatus PC-12.
L’équipage a obtenu les conditions météorologiques du message d’information Kilo émis par le service automatique d’information de région terminale (ATIS)Note de bas de page 2 de CYZV, qui indiquait des conditions de vol à vue avec des averses de pluie modérée, de la brume et des vents variables soufflant de l’ouest à 8 nœuds avec des rafales à 15 nœuds.
Le commandant a informé le P/O qu’il voulait faire l’approche directe sur la piste 09 en dépit du vent de dos. Il a ensuite fait son exposé d’approche pour une approche de navigation de surface (RNAV) fondée sur le système mondial de navigation par satellite (GNSS) piste 09 (annexe A), un atterrissage avec les volets configurés à 15° et une vitesse de référence d’atterrissage (Vref) de 95 KIAS (vitesse indiquée en nœuds).
La descente a été amorcée vers 16 h 50, et à 17 h 03, le P/O a contacté le spécialiste de l’information de vol de CYZV sur la fréquence obligatoire (MF) de 118,1 MHz. L’équipage a été informé que les vents soufflaient du 220° magnétique (M) à 6 nœuds.
À 17 h 05, l’avion a franchi le point de cheminement d'approche initiale ETBAR à 5078 pieds au-dessus du niveau de la mer (ASL), soit environ 250 pieds au-dessus de la pente d’approche de 3°, à une vitesse de 213 KIAS. L’équipage avait la piste 09 en vue, et le commandant a pris la décision d’accélérer pour effectuer une approche finale à haute vitesse, avec une décélération juste avant la piste. Croyant à tort que la limite de vitesse de 210 nœuds publiée sur la carte d’approche aux points de cheminement IGSUK et VOKON s’appliquait également à l’approche directe via ETBAR, le commandant a demandé au P/O d’annuler le plan de vol selon les règles de vol aux instruments (IFR) pour continuer l’approche selon les règles de vol à vue (VFR) et donc sans limitation de vitesse.
Par la suite, sans consulter le P/O, le commandant a augmenté la puissance. La vitesse de l’aéronef est passée à la vitesse maximale admissible en exploitation (Vmo) de 240 KIAS établie par le constructeur. Le P/O a fait une annonce de vitesse élevée. Le commandant a réduit la puissance pour stabiliser la vitesse aux environs de 230 KIAS. À ce moment-là, le P/O a exprimé son inconfort relatif à cette vitesse élevée. Toutefois, le commandant a indiqué qu’il continuait l’approche à haute vitesse. À environ 6 milles marins (NM) de la piste, le P/O a exprimé son doute quant à la réussite de l’atterrissage, et le commandant a indiqué à nouveau qu’il continuait l’approche à haute vitesse.
À 17 h 07 min 33 s, l’aéronef a franchi le repère d’approche finale DENEZ sur la pente d’approche de 3° à 233 KIAS.
À 17 h 08 min 08 s, l’aéronef a franchi 1000 pieds au-dessus du sol (AGL) à 236 KIAS en configuration lisse (le train d’atterrissage et les volets rentrés), et 17 secondes plus tard, il a franchi 500 pieds AGL une première fois à 238 KIAS. Une seconde après, l’aéronef est passé en survitesse par rapport à la Vmo de 240 KIAS et est resté en survitesse pendant 3 secondes. Le commandant a réduit la puissance, et la vitesse a atteint 244 KIAS avant de redescendre sous la Vmo. Deux secondes plus tard, le commandant a amorcé une montée afin de réduire la vitesse plus rapidement. Lorsque l’aéronef était à 195 KIAS, le commandant a fait l’annonce « gear down » [train sorti] pour que le P/O sorte le train d’atterrissage. À ce moment-là, le P/O a fait l’annonce de vitesse élevée, car la vitesse maximale de manœuvre du train d’atterrissage est 180 KIAS. Le commandant a répété « gear down ». La sortie du train d’atterrissage a été amorcée à 188 KIAS, soit 8 nœuds au-dessus de la vitesse maximale de 180 KIAS. Le P/O a ensuite demandé au commandant de confirmer la sortie des volets à 15° étant donné que la vitesse de l’aéronef était alors autour de 185 KIAS, c’est-à-dire de 20 KIAS supérieure à la vitesse maximale avec volets sortis. Le commandant a répondu que l’atterrissage allait être effectué sans volets.
À 17 h 08 min 53 s, l’aéronef a franchi le seuil de piste à 200 pieds AGL, à 180 KIAS (vitesse sol de 191 nœuds); son taux de descente était de 2000 pi/min, le train d’atterrissage était en transit et les volets étaient entièrement rentrés.
À 17 h 09 min 02 s, le poser des roues s’est fait relativement en douceur sur la piste mouillée, à environ 2525 pieds au-delà du seuil de piste, à 159 KIAS (vitesse sol de 167 nœudsNote de bas de page 3). Les freins ont ensuite été appliqués de façon forte et l’inverseur de poussée a été appliqué de la façon habituelle pour le commandant, c’est-à-dire au régime de ralenti en inversion.
À 17 h 09 min 17 s, réalisant que la sortie de piste était imminente, le commandant a augmenté l’inverseur de poussée à 48 % de l’application maximale, et 6 secondes plus tard, l’aéronef est sorti en bout de piste à une vitesse sol de 57 nœuds.
L’aéronef a dévié légèrement sur la gauche pour éviter les feux d’approche. Après avoir parcouru 590 pieds dans le gazon en bout de piste, le commandant a fait demi-tour à droite autour d’un feu d’approche et a augmenté la puissance pour revenir sur la piste. Après la sortie en bout de piste, l’équipage a avisé le spécialiste de l’information de vol que l’aéronef n’avait rien heurté et qu’il n’y avait aucun dommage. L’aéronef a ensuite circulé normalement jusqu’à son stationnement. L’équipage n’a pas été blessé.
1.2 Personnes blessées
Personne n’a été blessé.
1.3 Dommages à l’aéronef
L’aéronef n’a pas été endommagé, cependant les pneus du train d’atterrissage principal présentaient des signes de réversion du caoutchouc (figures 2 et 3).


1.4 Autres dommages
Aucun.
1.5 Renseignements sur le personnel
L’équipage de conduite se composait de 2 membres, dont les qualifications et heures de vol respectives sont décrites dans le tableau 1 ci-dessous.
| Commandant de bord | Premier officier | |
|---|---|---|
| Licence de pilote | Licence de pilote professionnel | Licence de pilote professionnel |
| Date d’expiration du certificat médical | 1er octobre 2021 | 1er mai 2022 |
| Heures totales de vol | 3187 | 1080 |
| Heures de vol sur type | 2867 | 280 |
| Heures de vol au cours des 7 jours précédant l’événement | 11 | 17 |
| Heures de vol au cours des 30 jours précédant l’événement | 68 | 67 |
| Heures de vol au cours des 90 jours précédant l’événement | 226 | 227 |
| Heures de vol sur type au cours des 90 derniers jours | 226 | 202 |
| Heures de service avant l’événement | 11 | 11 |
| Heures hors service avant la période de travail | 92 | 92 |
L’équipage de conduite possédait les licences et les qualifications nécessaires pour effectuer le vol, conformément à la réglementation en vigueur. Le commandant avait de l’expérience préalable à titre de commandant de bord sur le Pilatus PC-12 quand il s’est joint à Airmedic en septembre 2019 et a terminé sa formation, notamment un contrôle de la compétence du pilote (CCP), en janvier 2020. Son dernier CCP a été effectué en janvier 2021. Le 30 avril 2021, le commandant a fait l’objet de mesures disciplinaires et administratives par la compagnie en raison d’événements précédents.
Le P/O n’avait aucune expérience de vol sur le Pilatus PC-12 quand il s’est joint à Airmedic en 2019, où il a occupé des postes variés. Il avait obtenu son CCP en avril 2021.
L’équipage avait cumulé environ 11 heures de service continu au moment de l’événement. L’examen des horaires de travail et de repos des membres de l’équipage de conduite a permis d’établir que les facteurs liés à la fatigue n’étaient pas présents durant l’événement à l’étude.
1.6 Renseignements sur l’aéronef
L’aéronef à l’étude est un Pilatus PC-12/47E connu sous son nom commercial PC-12 NG (« Next Generation »), et est ainsi doté d’une avionique améliorée et d’un moteur légèrement plus puissant que ses prédécesseurs (tableau 2).
| Constructeur | Pilatus Aircraft Ltd. |
|---|---|
| Type, modèle et immatriculation | PC-12/47E, C-GIOX |
| Année de construction | 2010 |
| Numéro de série | 1237 |
| Date d’émission du certificat de navigabilité | 19 août 2019 |
| Total d’heures de vol cellule | 4660,4 heures |
| Type de moteur (nombre) | Pratt & Whitney Canada PT6A-67P (1) |
| Type d’hélice (nombre) | Hartzell HC-E4A-3D (1) |
| Masse maximale autorisée au décollage | 10 450 lb (4740 kg) |
| Types de carburant recommandés | Jet A, Jet A-1, Jet B |
| Type de carburant utilisé | Jet A-1 |
Il n’y avait aucune défectuosité enregistrée non corrigée au moment de l’événement. Rien n’indique que le mauvais fonctionnement d’un composant ou d’un système ait joué un rôle dans cet événement.
L’aéronef était configuré pour transporter un maximum de 7 passagers. Lors du vol à l’étude, la masse au décollage était de 9710,1 livres (la masse maximale étant de 10 450 livres) et la masse à l’atterrissage prévue était de 9185,1 livres (la masse maximale étant de 9921 livres). La masse et le centrage de l’aéronef respectaient les limites prescrites par le constructeur.
1.6.1 Distances d’atterrissage
Pour les besoins de l’enquête, les distances d’atterrissage normales dans 3 configurations de volets (40, 15, et 0°) ont été calculées à l’aide de l’application « PC-12 Calculator » de Pilatus Aircraft Ltd. Les calculs ont été faits pour les conditions du vol à l’étude Note de bas de page 4, mais avec un passage au seuil habituel, soit à 50 pieds AGL, avec la vitesse stabilisée à la vitesse d’approche appropriée pour la configuration, une piste sèche, une application moyenne des freins et sans l’utilisation de l’inverseur de poussée.
Il n’existe pas de données de certification sur piste mouillée, et donc pas non plus de données publiées pour les pistes mouillées (tableau 3).
| Configuration volets | Vitesse d’approche finale* (en nœuds) |
Distance (calculée) du seuil au poser des roues (en pieds) |
Course à l’atterrissage (en pieds) |
Distance totale (en pieds) |
|---|---|---|---|---|
| F40 | 82 | 945 | 1303 | 2248 |
| F15 | 95 | 1238 | 1707 | 2945 |
| F0 | 115 | 1729 | 2385 | 4114 |
* Pilatus Aircraft Ltd. parle de final approach speed (Vapp) (vitesse d’approche finale) dans son application PC-12 Calculator et dans les tableaux de performance publiés dans son manuel d’utilisation du pilote du Pilatus PC-12. Les procédures d’exploitation normalisées (SOP) d’Airmedic utilisent principalement Vref pour décrire la vitesse d’approche finale.
À la demande du BST, le constructeur a effectué une estimation de la distance d’atterrissage de l’aéronef précis de l’événement sur une piste sèche, dans la configuration et les conditions du vol à l’étude (un passage au seuil à 200 pieds AGL à une vitesse de 180 KIAS), avec un freinage maximal dans les 2 secondes après l’atterrissage, dans un premier temps sans inverseur de poussée et dans un second temps, avec l’inverseur de poussée au maximum (tableau 4).
| Configuration (volets/ freinage/inverseur de poussée) | Vitesse sol au poser des roues (en nœuds) |
Distance (calculée) du seuil au poser des roues (en pieds) |
Course à l’atterrissage (en pieds) |
Distance totale (en pieds) |
|---|---|---|---|---|
| F0/maximal/nul | 167 | 2525 | 4645 | 7170 |
| F0/maximal/maximal | 167 | 2525 | 3870 | 6395 |
Les données du vol à l’étude ont été utilisées pour obtenir le taux de décélération sur la piste et le comparer au taux de décélération obtenu lors des vols d’essai pour la certification de l’aéronef sur piste sèche. Cette comparaison a permis de conclure que le taux de décélération de l’aéronef de l’événement était légèrement supérieur à ceux obtenus sur piste sèche (0,25g) sans l’application de l’inverseur de poussée.
1.6.2 Décélération en vol
Selon les données du vol de l’événement, lors de la manœuvre de légère montée visant à ralentir l’aéronef en courte finale, le taux de décélération obtenu était d’environ 4 nœuds par seconde. En utilisant ce taux de décélération, on a calculé le temps théorique pour atteindre les vitesses de changement de configurations et pour descendre et passer le seuil de piste à 50 pieds AGL à la Vref. Ce temps théorique était de 35 secondes (tableau 5).
| Position 1 | Position 2 | |
|---|---|---|
| Distance du seuil de piste | 3,0 NM | 1,7 NM |
| Heure | 17 h 08 min 08 s | 17 h 08 min 25 s |
| Altitude | 1000 pieds AGL | 500 pieds AGL (1re fois) |
| Vitesse indiquée | 236 KIAS | 238 KIAS |
| Temps réel pour atteindre le seuil de piste | 45 s | 28 s |
| Début théorique de la décélération | 00:00:00 | |
| Décélération jusqu’à 180 nœuds et sélection de sortie du train | 00:00:14 | |
| Décélération jusqu’à 165 nœuds et sélection des volets à 15° | 00:00:03 | |
| Décélération jusqu’à la Vref de 95 nœuds pendant la descente jusqu’à 50 pieds AGL | 00:00:18 | |
| Temps total théorique de décélération | 35 s | |
| Différence (temps réel et temps théorique) | +10 s | −7 s |
Selon les mêmes données de vol, il a fallu 45 secondes à l’aéronef pour atteindre la piste à partir du moment où il a franchi 1000 pieds AGL, et 28 secondes à partir du moment où il a franchi 500 pieds AGL la première fois (annexe B).
1.7 Renseignements météorologiques
La carte Nuages et temps de la prévision de zone graphique pour la région, émise le 12 septembre 2021 à 13 h 28 et valide à partir de 14 h, indiquait la présence d’un système dépressionnaire au nord-nord-ouest de CYZV et d’un front froid à l’ouest qui se déplaçaient vers l’est à 30 nœuds. Selon les prévisions des vents et des températures en altitude, des vents soufflant du 240° vrai (V) à 23 nœuds étaient prévus entre 13 h et 17 h à 3000 pieds ASL pour CYZV.
La prévision d’aérodromeNote de bas de page 5 pour CYZV, mise à jour le 12 septembre 2021 à 10 h 56 et valide du 12 septembre à 10 h au lendemain à 8 h, était la suivante à partir de 16 h :
- vents soufflant du 220°V à 12 nœuds;
- visibilité de 6 SM;
- averses de faible pluie et brume;
- nuages épars à 600 pieds AGL;
- plafond couvert à 2000 pieds AGL.
Entre 16 h et 20 h, 30 % de probabilité des conditions suivantes :
- visibilité de 2 SM;
- orages, averses de pluie modérée et brume;
- plafond de nuages fragmentés à 600 pieds;
- ciel couvert à 2000 pieds avec la présence de cumulonimbus.
L’équipage a obtenu les conditions météorologiques à jour au moyen du message d’information Kilo de l’ATIS qui avait été émis à 16 h et indiquait ce qui suit :
- vents variables soufflant à 8 nœuds du 220°M au 280°M, avec des rafales à 15 nœuds;
- visibilité de 3 SM;
- averses de pluie modérée et brume;
- nuages épars à 900 pieds AGL;
- plafond de nuages fragmentés à 2000 pieds AGL;
- couche de nuages fragmentés à 4000 pieds AGL;
- ciel couvert à 7500 pieds AGL;
- température de 14 °C et point de rosée de 13 °C;
- calage altimétrique de 29,59 pouces de mercure (inHg).
Le message d’observation météorologique régulière d’aérodrome, émis le 12 septembre 2021 à 17 h pour CYZV, était le suivant :
- vents soufflant du 190°VNote de bas de page 6 à 6 nœuds;
- visibilité de 20 SM;
- averses de faible pluie;
- quelques nuages à 900 pieds AGL;
- quelques nuages à 2000 pieds AGL;
- plafond de nuages fragmentés à 4500 pieds AGL avec des cumulus bourgeonnants;
- couche de nuages fragmentés à 8000 pieds AGL;
- température de 13 °C, point de rosée de 12 °C;
- calage altimétrique de 29,57 inHg.
À 17 h 19, soit 10 minutes après l’atterrissage, un message d’observation météorologique spéciale d’aérodrome (SPECINote de bas de page 7) pour CYZV a été émis et indiquait ce qui suit :
- vents soufflant du 230°V à 10 nœuds;
- quelques nuages à 400 pieds AGL;
- quelques nuages à 900 pieds AGL;
- plafond de nuages fragmentés à 4000 pieds AGL avec des cumulus bourgeonnants;
- couche de nuages fragmentés à 10 000 pieds AGL;
- température de 14 °C et point de rosée de 12 °C;
- calage altimétrique de 29,57 inHg.
1.8 Aides à la navigation
Sans objet.
1.9 Communications
CYZV est situé dans une zone de contrôle (espace aérien de classe E) d’un rayon de 5 NM, dans laquelle une zone d’utilisation de fréquence obligatoire (zone MF) a été établie sur la fréquence 118,1 MHz. La station d’information de vol de CYZV fournit le service consultatif d’aérodrome aux aéronefs évoluant dans la zone MF de CYZV.
1.10 Renseignements sur l’aérodrome
![Image illustrant le dispositif lumineux d’approche omnidirectionnel (Source : Transports Canada, Manuel d’information aéronautique de Transports Canada, AGA — Aérodromes [24 mars 2022])](/sites/default/files/fra/rapports-reports/aviation/2021/a21q0087/images/a21q0087-figure-04.jpg)
CYZV est situé à environ 4 NM à l’est de la ville de Sept-Îles, à une altitude de 180 pieds ASL. Il possède 2 pistes asphaltées : la piste 09/27, d’une longueur de 6552 pieds et d’une largeur de 150 pieds, et la piste 13/31, d’une longueur de 5771 pieds et d’une largeur de 200 pieds (annexe C). La piste 13/31 était fermée par NOTAM du 31 août 2021 au 30 septembre 2021. La piste 09/27 est conforme aux normes applicablesNote de bas de page 8 et comprend un prolongement dégagéNote de bas de page 9 en herbe de 300 m (984 pieds) de longueur et 75 m (246 pieds) de largueur. La piste n’a pas d’aire de sécurité d’extrémité de piste, toutefois la réglementation en vigueur ne l’exige pas.
La piste 27 (extrémité opposée de la piste 09) est équipée d’un dispositif lumineux d’approche omnidirectionnel (ODALS) (figure 4). Selon le Manuel d’information aéronautique de Transports Canada,
[c]e dispositif se compose de 7 feux à éclats séquentiels omnidirectionnels et à intensité variable. […] Les feux sont disposés de la façon suivante : 5 feux sur le prolongement de l’axe de piste, à 90 m d’intervalle les uns des autres, commençant à 90 m du seuil et s’étendant sur une distance de 450 m. De plus, 2 feux sont disposés à 12 m à droite et à gauche du seuil de pisteNote de bas de page 10.
L’aéronef n’a subi aucun dommage dans le prolongement dégagé de la piste, qui était en herbe et suffisamment solide pour supporter le poids de l’aéronef.
1.10.1 Inspection post-incident
Le commandant, qui avait réussi à éviter l’ODALS avant de faire demi-tour pour revenir sur la piste, a informé le spécialiste de l’information de vol que l’aéronef n’avait rien heurté et qu’il n’y avait aucun dommage. Voyant l’avion circuler normalement en direction de l'aire de trafic, le spécialiste n’a pas immédiatement avisé l’exploitant de l’aéroport, mais a toutefois fait un rapport d’événement d’aviation détaillé à ce moment-là. L’inspection post-incident des installations au bout de la piste 09 a été effectuée le lendemain, lorsque l’exploitant de l’aéroport a appris qu’une sortie en bout de piste était survenue. Aucun dommage n’a été relevé.
1.10.2 État de la surface de la piste
CYZV évalue les conditions de piste selon les critères du format de compte rendu mondialNote de bas de page 11 pendant les heures d’ouverture publiées, et uniquement sur demande du spécialiste de l’information de vol ou d’un exploitant aérien en dehors de ces heures. L’aéronef de l’événement ayant atterri en dehors des heures de service du personnel aéroportuaire, les conditions de piste n’ont pas été évaluées et n’étaient donc pas à la disposition de l’équipage pour l’atterrissage.
1.11 Enregistreurs de bord
L’aéronef n’était pas muni d’un enregistreur de données de vol ni d’un enregistreur de conversations de poste de pilotage, mais la réglementation en vigueur n’en exigeait pas. Toutefois, l’aéronef était équipé d’un système de surveillance des tendances du moteur (ECTM) qui enregistre certaines donnéesNote de bas de page 12. Ces données sont acheminées à un fournisseur externe de service de contrôle de l’état du moteur et de suivi de la maintenance. Lorsqu’un dépassement des paramètres est décelé, l’exploitant est avisé et peut avoir accès à toutes les données recueillies au moment du dépassement. C’est grâce à ces données qu’Airmedic a été en mesure de reconstituer l’approche du vol à l’étude.
Les pilotes de la compagnie savaient que les données moteur étaient enregistrées, mais n’étaient pas conscients que d’autres données étaient aussi enregistrées et disponibles en cas de dépassement.
1.12 Renseignements sur l’épave et sur l’impact
Sans objet.
1.13 Renseignements médicaux et pathologiques
Selon l’information obtenue au cours de l’enquête, rien n’indique que des facteurs médicaux ou physiologiques ont nui à la performance des pilotes.
1.14 Incendie
Aucun incendie ne s’est produit.
1.15 Questions relatives à la survie des occupants
Sans objet.
1.16 Essais et recherche
Le laboratoire du BST à Ottawa (Ontario) a combiné les données de l’ECTM aux données radar de NAV CANADA afin de déterminer la trajectoire et l’état de l’aéronef lors de l’approche et de l’atterrissage. Il a ainsi été possible d’analyser les changements de vitesse, de puissance et de configuration au cours de l’approche, ainsi que de déterminer la vitesse et le point de poser approximatif sur la piste.
Le laboratoire a créé un graphique permettant de visualiser la trajectoire verticale de l’aéronef par rapport à la pente d’approche nominale de 3° (figure 5).

Le laboratoire du BST a aussi produit des graphiques pour illustrer les tracés de vol (annexe D), ce qui a permis d’établir ensuite des événements significatifs lors de l’approche avec les vitesses et les configurations précises (annexe B).
1.16.1 Rapports de laboratoire du BST
Le BST a produit le rapport de laboratoire suivant dans le cadre de la présente enquête :
- LP174/2021 – Radar Data Analysis [Analyse des données radar]
1.17 Renseignements sur les organismes et sur la gestion
1.17.1 Exploitant
Airmedic est un transporteur aérien basé à CYHU qui offre un service d’assistance médicale et de transport aéroporté adapté aux situations d’urgence. Au moment de l’événement, sa flotte se composait de 3 hélicoptères, et de 6 avions (des Pilatus PC-12 exploités en vertu de la sous-partie 703 du Règlement de l’aviation canadien [RAC], c’est-à-dire pour le service de taxi aérien).
1.17.1.1 Système de gestion de la sécurité
Airmedic s’est doté d’un système de gestion de la sécurité (SGS). Toutefois, étant donné que les exploitants de taxi aérien ne sont pas tenus de mettre en place un SGS en vertu de la réglementation, l’Aviation civile de Transports Canada (TCAC) n’évalue pas et ne surveille pas les SGS mis en place volontairement.
Plusieurs enquêtes du BSTNote de bas de page 13 ont fait ressortir la nécessité que TCAC évalue et surveille tous les SGS. De plus, le BST a émis 2 recommandationsNote de bas de page 14 liées aux SGS et à la gestion proactive de la sécurité pour tous les exploitants aériens. Enfin, l’enjeu de la gestion de la sécurité figure sur la Liste de surveillance du BST (voir la section 1.18.7 Liste de surveillance du BST).
1.17.1.2 Manuel d’exploitation de vol d’Airmedic
Le manuel d’exploitation de vol d’Airmedic comprend les exigences et la formation requise pour que les équipages puissent effectuer des approches de non-précision en utilisant la technique d’approche stabilisée avec angle de descente constant (SCDA)Note de bas de page 15. Toutefois, le manuel ne contient pas de politique, générale ou spécifique, sur l’obligation d’effectuer des approches stabilisées ni sur l’obligation d’effectuer une remise des gaz si l’approche est instable.
1.17.1.3 Formation sur la gestion des ressources de l’équipage
Le programme de formation d’Airmedic des pilotes inclut une formation initiale et périodique au sol sur la gestion des ressources de l’équipage (CRM), y compris des études de cas. Bien que la formation couvre les communications, elle n’aborde pas spécifiquement la gestion des déviations par rapport aux procédures d’exploitation normalisées (SOP).
1.17.1.4 Procédures d’exploitation normalisées
Les SOP d’Airmedic ont été revues par TCAC, qui a vérifié que les sujets exigés par l’article 723.107 de la Norme de service aérien commercial 723 étaient couverts. Le 28 septembre 2020, TCAC a délivré une lettre de conformité à la compagnie. Les passages des SOP pertinents à l’événement à l’étude sont indiqués dans le tableau 6 ci-dessous.
| Référence SOP | Texte |
|---|---|
1.19 Annonces normalisées 1.19.1 Généralités |
Afin de réduire la probabilité qu’une demande ou qu’une commande ne soit pas interprétée correctement et pour qu’une action corrective soit prise pour les situations indésirables, un certain nombre d’annonces normalisées ont été établies. […] Vitesse anormale Lorsqu’il remarque que la vitesse est anormale, le PNF devrait [soulignement ajouté] faire l’annonce « Air Speed » [vitesse indiquée]. Le PF devrait [soulignement ajouté] répondre « Check, correcting » [vérifiée, correction] et corriger la vitesse pour qu’elle se situe dans les paramètres normaux, ou si une vitesse anormale est nécessaire, répondre « Intentional » [intentionnelle] et continuer. |
2.29 Procédures d’approche aux instruments –Intermédiaire/finale 2.29.14 Approche stabilisée |
La configuration d’approche stabilisée devrait être obtenue au plus tard au moment de franchir le FAF/FAWP [repère d’approche finale/point de cheminement d’approche finale] ou, s’il n’y a pas de FAF, dès l’interception de la trajectoire d’approche finale. À moins qu’une approche stabilisée ne soit réalisée en franchissant le FAF/FAWP ou, s’il n’y a pas de FAF, pendant la descente sur la trajectoire d’approche finale, une remise des gaz (« Go-around ») devrait [soulignement ajouté] être envisagée. De même, si un ou plusieurs éléments d’une approche précédemment stabilisée sont dépassés, on devrait envisager [soulignement ajouté] de faire l’annonce pour une remise des gaz (« Go-around ») et d’exécuter la procédure d’approche interrompue. Une configuration d’approche stabilisée se définit comme suit […] :
|
| 2.29.15 Critères d’approche stabilisée | En franchissant le FAF/FAWP, l’aéronef devrait être configuré comme suit pour répondre aux critères d’approche stabilisée :
|
| 2.29.21 Tolérances en approche | Altitude : +100 pi, −0 pi Vitesse : +10 nœuds à −5 nœuds de la vitesse requise VSI [indicateur de vitesse verticale] : 1000 pi maximum à partir du virage conventionnel Trajectoire : LOC [radiophare d’alignement de descente] : un point sur le HSI [indicateur de situation horizontale] G/S [alignement de descente] : un point sur l’alignement de descente ADF [radiogoniomètre automatique] : ±5° de la trajectoire requise |
2.31 Procédures d’approche contact/visuelle, circuits VFR 2.31.1 Généralités |
La configuration, l’exécution des vérifications, les approches contact, les approches visuelles et les circuits VFR sont traités comme des variations du même type de procédure.
|
2.32 Approche interrompue, remise des gaz/atterrissage interrompu 2.32.1 Remise des gaz – Généralités |
Au cours de certaines approches, il peut devenir inopportun de poursuivre l’atterrissage. Dans ce cas, une annonce de remise des gaz (« Go-around ») devrait être [soulignement ajouté] faite et la procédure d’approche interrompue suivie. Les lignes directrices relatives aux conditions précises dans lesquelles une approche interrompue devrait être [soulignement ajouté] amorcée sont détaillées tout au long des présentes SOP. Ces lignes directrices ne peuvent pas couvrir toutes les circonstances. Par conséquent, une remise des gaz (« Go-around ») peut être déclenchée par l’un ou l’autre des pilotes quand il n’est plus opportun de poursuivre l’atterrissage. |
2.34 Procédures d’atterrissage 2.31.2 Configuration d’atterrissage et vérification avant atterrissage |
Approches visuelles : L’avion doit être configuré pour l’atterrissage et la liste de vérification avant atterrissage doit être exécutée avant d’atteindre les 1000 pieds AGL. |
2.35 Avant l’atterrissage 2.35.1 Vérification avant l’atterrissage |
Lorsqu’il est prêt et que l’IAS [vitesse indiquée] est ≤ 170 KIAS et décroissante, le PF annonce « Gear down, Landing Checks, Flaps 15 » [train sorti, vérifications d’atterrissage, volets 15]. |
| 2.35.2 Vérification à 500 pieds | À partir de ce point, la vitesse d’approche sera réduite de la VTARGET [vitesse cible] de 130 KIAS à la Vref [vitesse de référence], et l’annonce des écarts de vitesse sera ajustée en conséquence. |
| 2.36 Atterrissage –Coordination de l’équipage | Le contact avec le sol doit toujours se faire dans le premier ⅓ de la piste. |
1.17.1.5 Directives de la compagnie
Quelques mois avant l’événement à l’étude, Airmedic a reçu une plainte de passagers concernant un autre équipage ayant effectué une manœuvre de décélération entraînant une descente à taux élevé (manœuvre ayant déclenché une alerte du dispositif avertisseur de proximité du sol) et finalement l’atterrissage à mi-piste à la suite d’une approche finale à haute vitesse.
En réponse à cette plainte, la compagnie a rencontré et réprimandé le commandant du vol en question, et, en août 2021, a publié une note de service interneNote de bas de page 16 pour informer les pilotes que les manœuvres de ce genre étaient inappropriées. Il était expliqué, dans la note de service en question, pourquoi ces manœuvres ne devaient pas être exécutées. Il était aussi rappelé quelles sections des SOP s’appliquaient dans ce cas-là, et notamment la section 2.34.2. Cette section exige que les pilotes se préparant à effectuer une approche visuelle configurent l’aéronef pour l’atterrissage, et exécutent entièrement la liste de vérifications avant atterrissage, avant de franchir les 1000 pieds AGL.
1.17.2 Surveillance réglementaire de l’Aviation civile de Transports Canada
Lors de la demande de certificat d’exploitation aérienne pour les opérations du Pilatus PC-12 d’Airmedic, TCAC s’est assurée que tous les systèmes en place ainsi que le personnel clé en poste respectaient les exigences réglementaires. Airmedic a reçu son certificat le 30 septembre 2020. En janvier 2021, un nouveau chef pilote a été nommé, suivi, en avril 2021, d’un nouveau gestionnaire des opérations.
Dans le cadre de ses activités de surveillance réglementaire, TCAC a fait un suivi des comptes rendus du Système de compte rendu quotidien des événements de l’Aviation civile (SCRQEAC) Note de bas de page 17 concernant les aéronefs d’Airmedic. Lorsqu’un aéronef effectue une remise des gaz par exemple, NAV CANADA génère un rapport d’événement d’aviation qui est envoyé à TCAC et est ajouté dans le SCRQEAC. Par la suite, TCAC fait généralement une requête auprès de la compagnie pour comprendre les circonstances de l’événement. Ces données sont recueillies et analysées sur plusieurs années afin de déceler des changements importants au sein d’une même compagnie.
Au moment de l’événement à l’étude, TCAC n’avait effectué aucune inspection de validation du programme (IVP) ni inspection de processus (IP) pour les opérations des Pilatus PC-12 chez Airmedic. Toutefois à la suite de l’événement à l’étude, TCAC a fait une IP réactive, qui s’est soldée par 1 constatation liée à la formation et 6 observations, dont une visant la formulation des SOP qui « ne prévoient pas d’appel standard à altitudes déterminées pour déterminer si les critères de stabilisation [lire : critères d’approche stabilisée] sont rencontrés ou non » et qui pouvaient « laisser croire aux membres d’équipage qu’ils ont une discrétion sur l’application des critères de stabilisation Note de bas de page 18 ». En réponse, Airmedic a soumis un plan de mesures correctives pour la constatation et les observations en question à TCAC.
Selon le formulaire que TCAC utilise pour consigner les observations :
Une observation émise par Transports Canada Aviation civile (TCAC) vise à mettre en évidence un écart entre les pratiques observées et le système, les processus ou les procédures décrites dans vos manuels. De plus, une observation peut identifier un écart avec les normes ou pratiques de sécurité généralement acceptées. Elle vise à capturer et à communiquer les préoccupations en matière de sécurité. Répondre à une observation est volontaire. TCAC recevra et suivra les réponses, mais ne les approuvera ni ne les acceptera. Les observations et les réponses associées seront utilisées comme données de sécurité pour mettre à jour le profil de risque du titulaire du DAC [document d’aviation canadien], ce qui à son tour peut avoir un impact sur la portée de la surveillance future et la détermination de la fréquence Note de bas de page 19.
1.17.2.1.1 Alerte à la sécurité de l’Aviation civile sur les approches stabilisées
TCAC a publié l’Alerte à la sécurité de l’Aviation civile (ASAC) 2015-04, qui « vise à souligner l’importance d’une approche stabilisée et à [en] préciser ses élémentsNote de bas de page 20 ». L’Alerte précise, entre autres, ce qui suit :
Les critères d’approche stabilisée devraient être définis pour toutes les approches, et ils devraient préciser :
- que les approches soient stabilisées pas plus bas que 1 000 pieds au-dessus de l’élévation de l’aérodrome (AAE) dans des conditions météorologiques de vol aux instruments (IMC);
- que toutes les approches soient stabilisées pas plus bas que 500 pieds AAE dans des conditions météorologiques de vol à vue (VMC);
- qu’une annonce soit faite à 1000 pi AAE en IMC ou 500 pi AAE en VMC, à savoir si l’approche est stabilisée ou non;
- que l’approche demeure stabilisée jusqu’à l’atterrissage;
- que si une approche n’est pas stabilisée conformément aux présentes exigences ou qu’elle est déstabilisée par la suite, une remise des gaz est nécessaireNote de bas de page 21.
1.17.2.1.2 Révision des procédures d’exploitation normalisées
Dans son Manuel de l’inspecteur des transporteurs aériensNote de bas de page 22, TCAC précise que les inspecteurs qui révisent les SOP doivent bien connaître le type d’aéronef auxquelles elles s’appliquent et doivent vérifier que les procédures décrites dans les différents manuels de la compagnie ne contredisent pas le manuel de vol de l’aéronef ni le manuel d’exploitation de vol. Enfin, les inspecteurs de TCAC doivent s’assurer que les procédures sont conformes à la réglementationNote de bas de page 23 et qu’elles s’inscrivent dans des pratiques d’exploitation sécuritaires.
Une interprétation officielle concernant la révision des SOP a été publiée en 2014 dans le système de gestion d’information nationale sur la sécurité aérienne (SGINSA) de TCACNote de bas de page 24. Cette interprétation conclut que [traduction] « comme l’importance accordée aux SOP est considérable, il incombe à TCAC de revoir les SOP des exploitants pour en évaluer la qualité, la cohérence, l’exactitude, la concision, la clarté, la pertinence et le contenuNote de bas de page 25 ».
1.18 Renseignements supplémentaires
1.18.1 Facteurs humains
1.18.1.1 Prise de décision et conscience situationnelle
La prise de décision est un processus cognitif qui vise à déterminer un plan d’action parmi des possibilités. Ce processus consiste à cerner les enjeux et menaces et à évaluer les options en tenant compte des risques. La prise de décision d’un équipage est menée dans un environnement dynamique, nécessite une communication constante et passe par 4 étapes : recueillir l’information; traiter l’information; prendre des décisions; mettre en œuvre les décisions. La prise de décision peut être biaisée si la collecte d’information est incomplète et si l’information recueillie est inexacte, ainsi la communication entre les pilotes d’un équipage est critique. Les pilotes doivent se communiquer les informations disponibles afin d’avoir une même compréhension de la situation et être en mesure de prendre une décision optimaleNote de bas de page 26.
La conscience situationnelle est au cœur de la prise de décision du pilote et d’un équipage. Elle est la perception des éléments dans l’environnement, la compréhension de leur signification et la projection de leur état dans le futurNote de bas de page 27. Dans un environnement dynamique, la conscience situationnelle requiert [traduction] « l’extraction continue d’information sur l’environnement, la fusion de cette information avec l’information déjà à disposition afin de se faire une image mentale cohérente, et l’utilisation de cette image pour orienter la perception de nouvelles informations et anticiper les événements futursNote de bas de page 28 ». Une conscience situationnelle communeNote de bas de page 29,Note de bas de page 30 aux pilotes d’un équipage dépend du degré de concordance entre la conscience situationnelle respective de chaque pilote. Des membres d’équipage qui ont une conscience situationnelle commune peuvent anticiper et coordonner leurs actions et ainsi agir avec cohésion et efficacité.
Les pilotes travaillent dans un environnement complexe qui demande la surveillance de multiples sources et types d’informations. Il est établi que plusieurs biais cognitifs, dont les suivants, ont une incidence sur la façon d’interpréter l’information et d’y prêter attention dans les environnements complexes :
- La tendance à s’en tenir au plan, qui est une forme de biais de confirmation, se décrit comme une [traduction] « tendance profondément enracinée des personnes à poursuivre leur plan d’action initial même quand les circonstances changent et requièrent l’adoption d’un nouveau planNote de bas de page 31 ». Une fois qu’un plan a été établi et mis en œuvre, il devient plus difficile de reconnaître des stimuli ou des conditions dans l’environnement comme étant des indices de changement que lorsqu’aucun plan n’est établi. Pour qu’un pilote reconnaisse qu’un changement de plan s’impose et réagisse à temps, il doit percevoir la condition ou le stimulus comme étant suffisamment important pour agir immédiatement. Cette tendance à s’en tenir au plan devient encore plus forte lorsque la tâche (par exemple, un atterrissage) est sur le point d’être achevée.
- Les personnes ont une capacité limitée d’attention et de traitement de l’information. Par conséquent, elles peuvent tomber dans le piège du « rétrécissement de l’attention » ou de la canalisation. Elles se concentrent sur certains indices dans l’environnement qu’elles tentent de traiter, tout en détournant leur attention, par inadvertance ou intentionnellement, d’autres indices ou tâches. Par exemple, des pilotes dans des conditions de charge de travail élevée peuvent se concentrer sur certains indicateurs, au détriment d’autresNote de bas de page 32.
- La charge de travail dépend du nombre de tâches à accomplir dans une certaine période de temps. Si le nombre de tâches à accomplir augmente, ou si le temps disponible diminue, la charge de travail augmente. La saturation des tâches est une condition où le nombre de tâches à accomplir dans une période de temps donnée excède les capacités des pilotes à les accomplir, et certaines tâches sont alors omises ou reportées.
1.18.1.2 Modèles mentaux
Un modèle mental est une structure interne qui permet aux personnes de décrire, d’expliquer et de prédire des événements et des situations dans leur environnementNote de bas de page 33. Quand un modèle mental est adopté, ce modèle est résistant au changement. De nouveaux renseignements convaincants doivent être assimilés pour modifier un modèle mental. Un modèle mental inexact entravera la perception des éléments critiques ou la compréhension de leur importanceNote de bas de page 34.
1.18.1.3 Gestion des ressources de l’équipage
La CRM est l’utilisation efficace de toutes les ressources disponibles — ressources humaines, ressources technologiques et information — dans le but d’effectuer un vol en sécurité et avec efficacitéNote de bas de page 35. La CRM met en jeu les compétences, les habiletés, les attitudes, la communication, la conscience situationnelle, la résolution de problèmes et le travail d’équipe. La CRM est liée aux aptitudes cognitives et interpersonnelles requises pour gérer un vol. Les aptitudes cognitives comprennent les processus mentaux nécessaires pour acquérir et conserver une conscience situationnelle exacte, pour résoudre des problèmes et pour prendre des décisions. Les aptitudes interpersonnelles sont liées aux communications et aux comportements associés au travail d’équipe. Une bonne gestion des risques dans le poste de pilotage est intrinsèquement liée à une bonne CRM.
1.18.1.4 Rapport d’autorité
Le rapport d’autorité renvoie à la hiérarchie décisionnelle entre le commandant de bord et le P/O. Ce rapport se caractérise par plusieurs facteurs, notamment l’expérience de chaque personne. Un fort rapport d’autorité peut constituer une entrave à la dynamique décisionnelle d’un équipage et peut dissuader le P/O d’exprimer un désaccord notamment en raison de l’expérience. Dans le cas du vol à l’étude, le commandant de bord avait accumulé 2867 heures de vol sur type. Le P/O avait quant à lui 280 heures de vol sur type à son actif. Les 2 pilotes avaient été jumelés auparavant sans qu’aucun problème ne soit rapporté.
1.18.1.5 Assertivité progressive des premiers officiers
L’assertivité peut se définir comme étant la capacité d’exprimer ses opinions d’une manière calme et ferme et de ne pas accepter ce qui semble être incorrect. L’assertivité peut être progressive ou immédiate selon le niveau de gravité de la menace. Un des outils de communication de la CRM est le modèle PACE (probing, alerting, challenging et emergency warning)Note de bas de page 36. Le modèle PACE fournit aux pilotes, et plus particulièrement aux P/O, de nombreuses stratégies de communication visant à développer une assertivité progressive naturelle, selon les circonstances qui prévalent à un moment donnéNote de bas de page 37.
1.18.2 Limite de vitesse selon le Règlement de l’aviation canadien
Selon le RAC, il est interdit
b) d’utiliser un aéronef à une vitesse indiquée de plus de 200 nœuds lorsque celui-ci se trouve à une altitude inférieure à 3 000 pieds AGL et à une distance de 10 milles marins ou moins d’un aérodrome contrôlé, à moins d’y être autorisé par une autorisation du contrôle de la circulation aérienneNote de bas de page 38.
Par ailleurs, le RAC définit un aérodrome contrôlé comme un « [a]érodrome doté d’une unité de contrôle de la circulation aérienne en serviceNote de bas de page 39 ». Le RAC définit aussi une unité de contrôle de la circulation aérienne (unité ATC) comme suit :
- a) un centre de contrôle régional qui fournit le service de contrôle de la circulation aérienne aux aéronefs IFR;
- b) une unité de contrôle terminal qui fournit le service du contrôle de la circulation aérienne aux aéronefs IFR qui sont utilisés dans une région de contrôle terminal;
- c) une tour de contrôle de la circulation aérienne qui fournit, à un aérodrome donné, le service du contrôle de la circulation aérienneNote de bas de page 40.
Une ambiguïté d’interprétation existe lorsqu’un aérodrome, comme CYZV, n’est pas doté d’une tour de contrôle de la circulation aérienne, mais est situé dans l’espace aérien contrôlé de classe E où l’espacement entre les aéronefs IFR est assuré par le centre de contrôle régionalNote de bas de page 41. Afin de clarifier cette ambiguïté, une demande d’interprétation a été envoyée à TCAC.
Fait établi : autre
Selon l’interprétation de TCAC, CYZV est un aéroport non contrôlé, car il n’est pas doté d’une tour de contrôle. Par conséquent, la limite de vitesse de 200 nœuds stipulée à l’alinéa 602.32(1)b) du RAC ne s’applique pas.
1.18.3 Hydroplanage
L’hydroplanage, également appelé « aquaplanage », survient lorsqu’une couche d’eau se forme entre les pneus de l’avion et la surface de la piste, ce qui entraîne une perte d’adhérence et empêche l’avion de répondre aux commandes telles que la direction ou le freinage.
L’hydroplanage par réversion du caoutchouc
survient parfois quand un pneu verrouillé dérape sur une piste mouillée ou gelée. La chaleur résultant du frottement accroît la température du pneu, ce qui entraîne le décollement de petites particules de caoutchouc sur la bande de roulement. Ces particules s’accumulent derrière le pneu pour former un barrage qui empêche l’eau de s’échapper. L’eau ainsi emprisonnée se réchauffe et se transforme en vapeur. La pression de la vapeur soulève le pneu au-dessus du sol Note de bas de page 42.
1.18.4 Enregistreurs de données légers et suivi des données de vol
Depuis des décennies, les exploitants d’aéronefs multimoteurs à turbomoteurs définis au paragraphe 605.33(1) du RAC Note de bas de page 43 utilisés pour le transport de passagers doivent équiper ces aéronefs d’enregistreurs de données de vol. Ces exploitants peuvent se servir de ces données dans le cadre de programmes internes de suivi des données de vols (SDV) et d’assurance de la qualité des opérations aériennes. Ces programmes aident les exploitants aériens à gérer la sécurité de façon préventive. Par ailleurs, la présence même d’un enregistreur de données léger (LDR) à bord peut avoir une influence positive sur le comportement des pilotes.
La mise au point des LDR offre la possibilité d’étendre la surveillance des vols aux plus petits exploitants. Grâce à cette technologie et au SDV, ces exploitants sont notamment en mesure de surveiller la conformité aux SOP, la prise de décisions des pilotes et le respect des limites opérationnelles. À l’heure actuelle, aucune disposition du RAC n’exige l’installation d’un LDR à bord des aéronefs.
À plusieurs reprises dans ses rapports d’enquête sur la sécurité du transport aérien Note de bas de page 44, le BST a fait ressortir le potentiel que représentent les LDR et le SDV pour aider les exploitants à repérer de manière proactive les lacunes de sécurité avant qu’elles ne provoquent un accident. De plus, le BST a émis 2 recommandations liées aux LDR et au SDV (voir la section 1.18.6 Recommandations du BST).
1.18.5 Initiatives liées aux sorties en bout de piste
Les sorties en bout de piste sont une préoccupation internationale et ont été étudiées par différentes agences, différents organismes et différents constructeurs afin de déterminer les causes qui empêchent un aéronef de s’arrêter sur la piste et les facteurs qui peuvent atténuer le risque que de tels événements se produisent.
1.18.5.1 Facteurs de risque
Une analyse des données sur les sorties en bout de piste survenues sur une période de 14 ans, menée par la Flight Safety Foundation (FSF), a permis de déterminer que [traduction] « le risque de sortie en bout de piste augmente en présence de plusieurs facteurs de risque. Les facteurs de risque multiples engendrent un effet synergique (c.-à-d. que le risque est plus que doublé en présence de 2 facteurs)Note de bas de page 45 ».
Pour fournir aux pilotes et aux exploitants un moyen [traduction] « de cerner, de comprendre et d’atténuer les risques associés aux sorties en bout de piste à l’atterrissageNote de bas de page 46 », la Federal Aviation Administration (FAA) des États-Unis a publié la Circulaire d’information (AC) 91-79A en 2014 (modifiée en 2018). L’AC en question indique ce qui suit [traduction] :
Une étude des données de la FAA et du NTSB [National Transportation Safety Board des États-Unis] indique que les dangers suivants augmentent le risque de sortie en bout de piste :
- approche non stabilisée[*];
- haute élévation de l’aéroport ou altitude-densité élevée, ce qui entraîne une augmentation de la vitesse sol;
- effet de la vitesse anémométrique excessive au moment de franchir le seuil de la piste[*];
- masse de l’avion à l’atterrissage;
- atterrissage au-delà du point de poser[*];
- déclivité négative de la piste;
- hauteur excessive au-dessus du seuil de la piste[*];
- utilisation retardée des dispositifs de décélération[*];
- atterrissage avec vent de dos[*];
- piste mouillée ou contaminée[*]Note de bas de page 47,Note de bas de page 48.
La FAA propose une stratégie qui repose sur une formation théorique et aussi pratique sur les facteurs de risque de sortie en bout de piste pour aider les pilotes à mieux reconnaître les atterrissages à risqueNote de bas de page 49.
Dans la même circulaire, la FAA considère que [traduction] « le respect des SOP et l’utilisation des pratiques exemplaires pour les approches stabilisées constitueront toujours la première ligne de défense pour éviter une sortie en bout de pisteNote de bas de page 50 ».
1.18.5.2 Procédures d’exploitation normalisées
Les SOP, y compris les annonces et listes de vérification normalisées, sont des sources d’information cruciales qui offrent aux pilotes des lignes directrices sur l’utilisation générale de l’aéronef. Elles aident les pilotes dans la prise de décision et la coordination entre les membres de l’équipage.
Dans le but de réduire les risques d’accidents liés aux approches et à l’atterrissage, l’Organisation de l’aviation civile internationale (OACI), la FSF, la FAA, le NTSB, TCAC ainsi que le BST ont tous, à nombreuses reprises, souligné l’importance de SOP claires, complètes, précises et sans ambiguïté, ainsi que la nécessité de se conformer aux SOP pendant les phases critiques du volNote de bas de page 51. D’ailleurs, entre 1994 et 2022, les procédures incohérentes ou manquantes sont ressorties dans 39 faits établis (divers) dans les rapports d’enquête sur la sécurité du transport aérien du BSTNote de bas de page 52. Les lacunes identifiées étaient principalement liées à l’absence de directives précises et aux divergences dans les procédures.
1.18.5.3 Approches stabilisées
Comme l’ont établi des enquêtes précédentes du BSTNote de bas de page 53 et d’organismes dans d’autres pays, les approches non stabilisées posent un risque élevé aux opérations aériennes, dont le risque de sortie en bout de pisteNote de bas de page 54.
1.18.5.4 Systèmes embarqués de dépassement de piste et d’alerte
De nouvelles mesures de protection technologiques sont maintenant disponibles. C’est le cas des systèmes embarqués de dépassement de piste et d’alerte (ROAAS) mis au point pour les aéronefs, qui peuvent aider à réduire le nombre de sorties en bout de piste, particulièrement pendant l’atterrissage. Ces systèmes envoient des alertes visuelles et sonores aux pilotes avant le poser des roues si les conditions indiquent que l’atterrissage ne peut pas être effectué dans la distance d’atterrissage disponible sur la piste prévue. Ils peuvent même surveiller les conditions après le poser des roues si le freinage n’est pas aussi efficace que prévu Note de bas de page 55.
Les ROAAS n’ont pas encore été largement adoptés par les exploitants canadiens; toutefois, certains d’entre eux ont informé le BST qu’ils prévoyaient installer de tels systèmes au cours des prochaines années. À l’heure actuelle, Airmedic n’a pas de ROAAS à bord de ses aéronefs. La réglementation n’exige pas de tels systèmes.
1.18.6 Recommandations du BST
Le 14 mai 2013, le Bureau a émis la recommandation A13-01 selon laquelle il a recommandé que
le ministère des Transports, en collaboration avec l’industrie, élimine les obstacles et élabore des pratiques recommandées en ce qui a trait à la mise en œuvre du suivi des données de vol et à l’installation de systèmes d’enregistrement des données de vol légers par les exploitants commerciaux qui ne sont pas actuellement tenus de munir leurs aéronefs de ces systèmes.
Recommandation A13-01 du BST
Le 26 avril 2018, le Bureau a remplacé la recommandation A13-01 par la recommandation A18-01 selon laquelle il a recommandé que
le ministère des Transports oblige l’installation de systèmes d’enregistrement des données de vol légers chez les exploitants commerciaux et exploitants privés qui n’y sont pas actuellement tenus.
Recommandation A18-01 du BST
Dans sa plus récente réponse en janvier 2023, Transports Canada (TC) a indiqué qu’il était d’accord en principe avec la recommandation.
À la suite de la publication en 2021 de l’Avis de proposition de modification (APM) sur les LDR, TC a reçu des contributions et des commentaires importants du secteur qui ont donné lieu à une réévaluation de l’approche et de la portée des exigences en matière de LDR. TC élabore actuellement un nouvel APM révisé, qui devrait être publié en 2023 à des fins de consultation. La révision de l’APM et la consultation supplémentaire viendront retarder les échéanciers de mise en œuvre de la réglementation tels qu’ils sont décrits dans le Plan prospectif de réglementation de TC.
Le Bureau est encouragé par les efforts que TC déploie continuellement pour exiger l’installation rétroactive de LDR dans les aéronefs existants et l’installation de LDR dans les aéronefs nouvellement construits. Cependant, le Bureau est préoccupé par la possibilité d’une redéfinition de la portée des exigences en matière de LDR et par d’autres retards. Jusqu’à ce que l’APM révisé soit accessible pour un examen, on ne saura pas si les exigences proposées précédemment seront préservées.
Par conséquent, à l'égard de la réponse à la recommandation A18-01, le Bureau estime que son évaluation est impossible Note de bas de page 56.
1.18.7 Liste de surveillance du BST
La Liste de surveillance du BST énumère les principaux enjeux de sécurité qu’il faut s’employer à régler pour rendre le système de transport canadien encore plus sûr.
Les sorties en bout de piste figurent sur la Liste de surveillance du BST depuis 2010. Du 1er janvier 2005 au 30 juin 2022, on a enregistré en moyenne 9,3 sorties en bout de piste par année aux aéroports canadiens, dont 6,7 sont survenues au cours de l’atterrissage. Même si le nombre de sorties en bout de piste varie d’une année à l’autre, il n’y a aucune tendance statistiquement importanteNote de bas de page 57.
La piste 09 à CYZV n’a aucune aire de sécurité d’extrémité de piste (RESA), et la réglementation en vigueur n’en exige pas. Avant d’amorcer le virage, l’aéronef à l’étude a parcouru environ 600 pieds dans le prolongement dégagé de la piste sans subir de dommages. Ainsi, cet événement démontre l’importance du sol, du relief et de l’absence d’obstacles au-delà de l’extrémité de la piste pour réduire les conséquences néfastes d’une sortie en bout de piste.
MESURES À PRENDRE Malgré les mesures prises jusqu’à présent, le nombre de sorties en bout de piste au Canada est demeuré constant depuis 2005. Afin de réduire ce nombre, un effort concerté est de mise. L’enjeu des sorties en bout de piste demeurera sur la Liste de surveillance du BST jusqu’à ce que
|
Un SGS est un cadre reconnu à l’échelle internationale qui permet aux entreprises de cerner les dangers, de gérer les risques et d’améliorer la sécurité de leurs activités, idéalement avant que ne survienne un accident. Bien que l’enjeu de la gestion de la sécurité figure sur la Liste de surveillance depuis 2010 et que la sensibilisation du secteur à l’égard des SGS ait lentement augmenté depuis lors, les rapports d’enquête du BST continuent de faire état de lacunes et de préoccupations dans 3 secteurs de transport.
Étant donné que les exploitants de taxi aérien ne sont pas tenus de mettre en place un SGS en vertu de la réglementation, l’efficacité du SGS d’Airmedic mis en place volontairement n’a pas été évaluée ni surveillée par TCAC.
|
MESURES À PRENDRE La gestion de la sécurité restera sur la Liste de surveillance des secteurs de transport aérien jusqu’à ce que
|
2.0 Analyse
Rien n’indique qu’il y a eu une défaillance de la cellule, des moteurs ou d’un système pendant le vol à l’étude. Par ailleurs, la performance de l’aéronef n’a pas été un facteur dans l’événement. Les membres d’équipage de conduite possédaient les licences et les qualifications nécessaires pour effectuer le vol, conformément à la réglementation en vigueur, et rien n’indique que des facteurs physiologiques comme la fatigue ont atténué leurs capacités. Par conséquent, l’analyse portera sur la décision d’effectuer et de poursuivre l’approche à haute vitesse jusqu’à 500 pieds au-dessus du sol (AGL), sur la décision de poursuivre l’atterrissage et enfin sur les initiatives liées aux sorties en bout de piste.
2.1 Décision d’effectuer une approche finale à haute vitesse
Au moment de l’exposé d’approche avant la descente du niveau de vol 270, le commandant a informé le premier officier (P/O) qu’il allait lui montrer que le Pilatus PC-12 permettait de faire une descente tardive à un taux de descente d’environ 3000 pi/min. Le message du service automatique d’information de région terminale pour l’aéroport de Sept-Îles indiquait des conditions de vol à vue, des averses de pluie modérée et des vents soufflant de l’ouest à 8 nœuds avec des rafales à 15 nœuds. Ces conditions étaient favorables à un atterrissage sur la piste 27; toutefois, le commandant a informé le P/O qu’il allait faire une approche directe vers la piste 09 via le point de cheminement d’approche initiale ETBAR, et un atterrissage avec les volets configurés à 15° avec une vitesse de référence d’atterrissage (Vref) de 95 nœuds.
L’avion a franchi le point de cheminement ETBAR à environ 250 pieds au-dessus de la pente d’approche de 3°, à une vitesse de 213 KIAS (vitesse indiquée en nœuds). L’équipage avait la piste 09 en vue, et le commandant a pris la décision d’accélérer pour effectuer une approche finale à haute vitesse, avec une décélération juste avant la piste. Toutefois, puisqu’il croyait que la limite de vitesse de 210 nœuds publiée sur la carte d’approche aux points de cheminement IGSUK et VOKON s’appliquait également à l’approche directe via ETBAR, il a demandé au P/O d’annuler le plan de vol selon les règles de vol aux instruments (IFR). Par la suite, et sans consulter le P/O, le commandant a augmenté la puissance. La vitesse de l’aéronef a atteint la vitesse maximale admissible en exploitation (Vmo) de 240 KIAS. Le P/O a annoncé une vitesse élevée. Le commandant a réduit la puissance pour stabiliser la vitesse aux environs de 230 KIAS. À ce moment-là, le P/O a exprimé son inconfort relatif à cette vitesse élevée. Toutefois, le commandant a confirmé qu’il continuait l’approche à haute vitesse. L’aéronef s’est retrouvé ensuite à 3 milles marins (NM) de la piste à 1000 pieds AGL (point désigné d’approche stabilisée des procédures d’exploitation normalisées [SOP]) en configuration lisse à une vitesse de 236 KIAS.
Quelques mois avant l’événement à l’étude, une approche finale à haute vitesse similaire avait été effectuée par un autre équipage, et la manœuvre de décélération avec une descente rapide près de la piste s’était soldée par une plainte de passagers. La compagnie avait réprimandé le pilote en question et publié une note de service destinée aux équipages pour les informer formellement que ces manœuvres étaient inappropriées et ne devaient pas être exécutées.
Ainsi, la décision d’effectuer une approche finale à haute vitesse malgré les instructions contraires de la compagnie a vraisemblablement été influencée par le fait qu’il n’y avait aucun passager à bord et par le fait que l’équipage ne connaissait pas la capacité réelle d’enregistrement du système de surveillance des tendances du moteur (ECTM). Par conséquent, l’équipage a fort probablement supposé que l’équipe de gestion de la compagnie n’aurait pas connaissance des écarts par rapport aux SOP et qu’il ne risquait pas de sanctions administratives.
Fait établi quant aux causes et aux facteurs contributifs
Lors du vol à l’étude, le commandant, jumelé à un P/O ayant peu d’expérience sur le Pilatus PC-12, a décidé de faire la démonstration d’une approche finale à haute vitesse avec décélération juste avant la piste. Par conséquent, le point désigné d’approche stabilisée défini dans les SOP (1000 pieds AGL) a été franchi en configuration lisse à une vitesse de 236 KIAS.
2.2 Point désigné d’approche stabilisée
À son passage au point désigné d’approche stabilisée défini dans les SOP, l’aéronef pouvait encore atteindre le seuil de la piste à 50 pieds AGL à la Vref de 95 nœuds, en configuration d’atterrissage avec les volets à 15°, en exécutant une manœuvre de décélération en montée suivie d’une descente à taux élevé avant le seuil de la piste.
Selon les calculs effectués à partir des données du constructeur de l’aéronef, la distance d’atterrissage normaleNote de bas de page 58 est de 2945 pieds pour la configuration de volets à 15° et les conditions du vol à l’étude. Cette distance d’atterrissage comprend une distance de 1707 pieds pour la course à l’atterrissage dans des conditions de freinage moyen sans inverseur de poussée.
Le commandant, sachant que le Pilatus PC-12 lui permettait de se poser sur des pistes courtes et ayant la piste en vue, était confiant de pouvoir se poser dans le premier ⅓ de la piste (2184 premiers pieds) et estimait alors disposer de plus de 4300 pieds de piste pour la course à l’atterrissage. Ainsi, le commandant était convaincu qu’il pouvait s’arrêter sur la piste mouillée, malgré le vent de dos.
2.3 Rapport d’autorité et assertivité
À environ 6 NM de la piste, l’aéronef volait à une vitesse de 230 KIAS. Le P/O a exprimé son doute quant à la réussite de l’atterrissage et le commandant a confirmé son intention de poursuivre l’approche à haute vitesse. Cependant, le commandant n’ayant pas communiqué son intention de s’écarter des SOP au P/O – ni pour la configuration à 1000 pieds AGL, ni pour la décélération et la configuration de l’aéronef avant d’atteindre le seuil de piste – il est vraisemblable que le P/O avait une autre compréhension de la situation. Ainsi, les 2 pilotes n’avaient plus une conscience situationnelle commune de l’exécution de cette approche en dehors des paramètres définis dans les SOP ni de la manœuvre à venir pour effectuer l’atterrissage selon l’exposé, soit à la Vref de 95 KIAS et avec les volets configurés à 15°.
Les 2 pilotes se connaissaient bien, mais le commandant ayant 3 fois plus d’expérience de vol en tout que le P/O et 10 fois plus d’expérience de vol sur le Pilatus PC-12, le rapport d’autorité était élevé pour l’expérience de vol sur le Pilatus PC-12. Lors de l’approche, le P/O a verbalisé son inconfort et par la suite son doute quant à la réussite de l’atterrissage. Cependant, ses communications n’étaient pas de nature exécutoire comme c’est le cas d’une annonce de remise des gaz. Le P/O a senti qu’il n’avait pas suffisamment d’expérience pour passer de la consultation passive à une assertivité suffisante pour convaincre le commandant d’effectuer une remise des gaz.
Fait établi quant aux causes et aux facteurs contributifs
Le P/O avait des doutes quant à la réussite de l’atterrissage lors de l’approche à haute vitesse; toutefois, en raison du rapport d’autorité, il s’en est remis à l’expérience du commandant et n’a pas osé donner l’ordre exécutoire de remise des gaz.
2.4 Poursuite de l’approche à haute vitesse
Après le passage des 1000 pieds AGL, l’approche à haute vitesse (236 KIAS) s’est poursuivie pendant 17 secondes, soit jusqu’au passage des 500 pieds AGL (238 KIAS) à environ 1,7 NM de la piste. Pendant ces 17 secondes, le commandant, concentré sur l’approche, a probablement subi un rétrécissement de l’attention entravant une pleine conscience de la vitesse si près de la piste.
Une seconde plus tard, la vitesse a dépassé la Vmo de 240 KIAS et le commandant a immédiatement réduit la puissance au minimum. Quatre secondes après la réduction de la puissance, le commandant a amorcé une montée afin de réduire la vitesse plus rapidement. Malgré cette manœuvre, l’aéronef était à 28 secondes du seuil de piste alors que le temps théorique de décélération pour atteindre la Vref de 95 nœuds était de 35 secondes. Par conséquent, il n’était plus possible de ralentir l’aéronef, de le configurer pour l’atterrissage, d’atteindre la vitesse Vref de 95 KIAS et en même temps de descendre en vue de franchir le seuil de piste à 50 pieds AGL. Toutefois, percevant qu’il était toujours possible de se poser dans le premier ⅓ de piste, le commandant a poursuivi l’approche.
Fait établi quant aux causes et aux facteurs contributifs
Lorsque l’aéronef était à environ 1,7 NM de la piste, à une vitesse de 238 KIAS à 500 pieds AGL, il n’était plus possible de décélérer et de poursuivre la descente pour atteindre le seuil de piste à 50 pieds AGL en configuration d’atterrissage stabilisé à la Vref de 95 KIAS. Toutefois, percevant qu’il était toujours possible de se poser dans le premier ⅓ de piste, le commandant a poursuivi l’approche.
2.5 Décision d’effectuer l’atterrissage
Généralement, une charge de travail élevée a tendance à provoquer un rétrécissement de l’attention. Dans ces circonstances, certaines tâches risquent d’être omises ou de ne pas être exécutées dans le bon ordre, et certaines informations critiques risquent de ne pas être saisies ou prises en compte.
Compte tenu de la vitesse élevée de l’aéronef lorsqu’il était à environ 1,7 NM de la piste et à 500 pieds AGL, il restait très peu de temps aux pilotes pour exécuter les tâches requises pour décélérer et configurer l’aéronef avant l’atterrissage. Cette charge de travail élevée si près de la piste a influencé la décision de ne pas respecter la limite de vitesse pour sortir le train et de ne pas tenir compte de l’effet que peut avoir la composante vent arrière combinée à la vitesse élevée sur le freinage sur piste mouillée. De plus, le commandant s’étant fait un modèle mental selon lequel il était possible d’atterrir dans le premier ⅓ de la piste, sa perception et sa compréhension d’éléments critiques ont pu être entravées.
Lors de la manœuvre de décélération, le commandant a fait l’annonce « gear down » [train sorti] à environ 195 KIAS, et le P/O a annoncé la vitesse élevée, la vitesse maximale de manœuvre du train d’atterrissage étant de 180 KIAS. Le commandant, concentré sur l’exécution des tâches requises pour atterrir, a demandé « gear down » à nouveau, confirmant ainsi au P/O son intention d’atterrir. Bien que ressentant un inconfort à l’idée de poursuivre l’approche et l’atterrissage, le P/O a choisi de ne pas contredire le commandant à ce moment critique du vol, soit à 0,5 NM du seuil de la piste. Il a sélectionné la sortie du train d’atterrissage à 188 nœuds. Ce geste du P/O a pu être interprété par le commandant comme une validation de sa décision. Il est à noter que, à ce moment, le P/O disposait de très peu de temps pour analyser la situation et les options. En effet, l’indication du train sorti et verrouillé est survenue seulement 7 secondes avant le poser des roues sur la piste.
Même si une remise des gaz avant d’atteindre le seuil de la piste était possible sans difficulté particulière, celle-ci se serait soldée par l’émission d’un rapport d’événement d’aviation par le spécialiste de l’information de vol et, fort probablement, par un suivi de la compagnie auprès des pilotes sur les circonstances entourant la remise des gaz.
Le commandant ayant déjà fait l’objet de sanctions administratives par la compagnie en raison d’événements précédents, il pouvait raisonnablement croire qu’il ferait l’objet de nouvelles sanctions administratives et disciplinaires si la compagnie apprenait qu’il avait effectué cette approche à haute vitesse en s’écartant largement des SOP. Ainsi, il est probable que cette situation ait influencé sa décision de poursuivre l’approche pour éviter un rapport d’événement à la suite d’une remise des gaz.
Fait établi quant aux causes et aux facteurs contributifs.
À environ 0,5 NM de la piste à 500 pieds AGL, alors qu’il était concentré sur l’exécution de l'atterrissage dans le premier ⅓ de piste, le commandant a insisté pour que le train d’atterrissage soit sorti même si la vitesse de l’aéronef dépassait à ce moment-là la vitesse maximale de manœuvre du train d'atterrissage. Le P/O a exécuté l’ordre et le train est sorti, ce qui a permis à l’atterrissage de se poursuivre.
Selon les SOP (liste de vérification avant atterrissage), le pilote aux commandes fait l’annonce « gear down, landing checks, flaps 15 » [train sorti, vérifications d’atterrissage, volets 15] lorsque la vitesse est inférieure ou égale à 170 KIAS et qu’elle baisse. Dans le cas du vol à l’étude, puisqu’après la sélection de « gear down », la vitesse était aux environs de 185 KIAS et que la vitesse maximale avec volets sortis était de 165 KIAS, le P/O a vérifié avec le commandant s’il devait bien sortir les volets à 15°. Le commandant lui a répondu que l’atterrissage allait être effectué sans volets. Cette décision était stratégique dans le contexte de son intention de se poser dans le premier ⅓ de la piste. Cependant, un atterrissage sans volets entraîne une augmentation de la distance de roulage au sol d’environ 680 pieds sur piste sèche, et ce, seulement si la vitesse est stabilisée à la Vref de 115 KIAS sans volets.
L’aéronef a franchi le seuil de piste à 200 pieds AGL, à 180 KIAS (vitesse sol de 191 nœuds), avec un taux de descente de 2000 pi/min, le train d’atterrissage en transit et les volets entièrement rentrés. Dans une telle situation, même si le pilote gère la trajectoire de vol en vue d’un atterrissage dans le premier ⅓ de piste, l’aéronef a une vitesse verticale et une vitesse horizontale excessives. Pour qu’il reconnaisse qu’un changement de plan s’impose et réagisse à temps, le pilote doit percevoir la condition ou le stimulus comme étant suffisamment importants pour réagir immédiatement. De plus, la tendance à s’en tenir au plan est encore plus forte lorsque l’objectif est sur le point d’être réalisé.
Selon les calculs réalisés, au moment où l’aéronef a franchi le seuil de piste, avec un freinage maximal sur piste sèche, sans inverseur de poussée et sans volets, la distance d’atterrissage était de 7170 pieds et dépassait la longueur de piste, qui était de 6552 pieds. Alternativement, une application maximale de l’inverseur de poussée procurait une marge théorique de 157 pieds. Cependant, la piste était mouillée.
Fait établi quant aux causes et aux facteurs contributifs
L’aéronef a franchi le seuil de piste à 200 pieds AGL à une vitesse de 180 KIAS, à un taux de descente de 2000 pi/min, le train d’atterrissage en transit et les volets entièrement rentrés. Dans ces conditions, il n’était pas possible d’arrêter l’aéronef sur la piste mouillée. Toutefois, le commandant, sous l’influence du biais de tendance à s’en tenir au plan et concentré sur l’exécution de l’atterrissage dans le premier ⅓ de la piste, a poursuivi l’approche.
2.6 Atterrissage et sortie en bout de piste
Les conditions de piste n’étaient pas disponibles au moment de l’approche. Toutefois, l’équipage a observé que la piste était mouillée. L’inspection des pneus après le vol a révélé des marques qui confirment que de l’hydroplanage par réversion du caoutchouc s’était produit lors du freinage sur la piste. La distance de freinage augmentant avec l’hydroplanage, il est raisonnable de conclure que l’augmentation de la distance de freinage sur la piste mouillée dépassait la marge théorique de 157 pieds disponible pour un atterrissage sur piste sèche avec l’inverseur de poussée au maximum.
Le poser des roues s’est fait relativement en douceur, à environ 2525 pieds au-delà du seuil de la piste, à 159 KIAS (vitesse sol de 167 nœuds). Les freins ont ensuite été appliqués fortement et l’inverseur de poussée, de la façon habituelle (c’est-à-dire au régime de ralenti en inversion). Le pilote n’a pas utilisé l’inverseur de poussée au maximum et ne l’avait jamais fait dans le passé. Lors du freinage, l’aéronef s’étant retrouvé en hydroplanage, la sortie en bout de piste était inévitable. Ainsi, l’utilisation habituelle de l’inverseur de poussée n’était qu’un facteur additionnel de sortie en bout de piste, qui a en réalité uniquement influencé la vitesse à laquelle l’avion a quitté le bout de la piste et la distance parcourue dans le prolongement dégagé de piste.
Le commandant était concentré sur le freinage ainsi que sur le contrôle latéral de l’aéronef sur la piste mouillée, et n’a ainsi pas perçu immédiatement que la sortie en bout de piste était probable. Quinze secondes après le poser des roues, à environ 750 pieds du bout de la piste, soit quand l’équipage a réalisé qu’une sortie était imminente, le commandant a augmenté l’inverseur de poussée. Six secondes plus tard, l’aéronef est sorti en bout de piste à une vitesse sol de 57 nœuds.
Fait établi quant aux causes et aux facteurs contributifs
L’aéronef s’est posé sur la piste à environ 2525 pieds du seuil à 159 KIAS, soit à une vitesse sol de 167 nœuds. Étant donné que la vitesse excessive, combinée aux autres facteurs, a augmenté la distance d’atterrissage, l’aéronef est sorti en bout de piste à une vitesse sol de 57 nœuds, 21 secondes plus tard.
Les données de vol ont été comparées aux données obtenues lors des vols de certification effectués sur piste sèche. Le taux de décélération obtenu lors du vol à l’étude sur la piste mouillée, avec un freinage et une application habituelle de l’inverseur de poussée (régime de ralenti en inversion), était légèrement plus élevé que les taux de décélération obtenus pendant les essais en vol de certification, avec un freinage maximal et sans inverseur de poussée. Avant d’amorcer le virage, l’aéronef a parcouru environ 600 pieds dans le prolongement dégagé de piste, ce qui équivaut à une distance d’atterrissage d’environ 7142 pieds. Cette distance d’atterrissage est similaire à la distance d’atterrissage estimée par le constructeur de 7170 pieds sur piste sèche avec freinage maximal et sans inverseur de poussée. Ainsi, il est possible de conclure que l’application habituelle de l’inverseur de poussée (régime de ralenti en inversion) a uniquement compensé les effets de l’hydroplanage.
2.7 Enregistreur de conversations de poste de pilotage
Lors de cette approche à haute vitesse, il était possible d’arriver au point désigné d’approche stabilisée défini dans les SOP à 1000 pieds AGL, en prévoyant une décélération de quelque 35 secondes. Par la suite, même s’il n’était plus possible de respecter les SOP, il était encore possible d’amorcer la décélération et de passer le seuil de piste sur la pente à 50 pieds AGL, et ce, dans une configuration pour l’atterrissage à la Vref de 95 KIAS. Toutefois, l’approche à haute vitesse a été poursuivie jusqu’au point où il n’était plus possible de stopper l’aéronef sur la piste.
En l’absence d’enregistreur de conversations de poste de pilotage, l’enquête n’a pas pu établir clairement les activités et les communications des 2 pilotes ni évaluer avec précision le contexte de la poursuite de cette approche à haute vitesse.
Fait établi quant aux risques
Si les enregistrements de conversations de poste de pilotage ne sont pas disponibles aux enquêteurs du BST, il est impossible d’évaluer avec exactitude la prise de décision du pilote, la gestion des ressources de l’équipage, la gestion de la charge de travail, et l’exécution et le respect des SOP, ce qui risque de nuire à la détection des lacunes de sécurité et donc à l’amélioration de la sécurité des opérations de vol.
2.8 Initiatives liées aux sorties en bout de piste
Les sorties en bout de piste figurent sur la Liste de surveillance du BST depuis 2010 et malgré les mesures prises jusqu’à présent, le nombre de sorties en bout de piste au Canada est demeuré constant depuis 2005. Afin de réduire ce nombre, un effort concerté est de mise. Dans le cadre de ces efforts, des aides sont maintenant disponibles pour augmenter la conscience de la situation des pilotes avant et sur la piste. C’est le cas des systèmes embarqués de dépassement de piste et d’alerte (ROAAS) pour les aéronefs et des indices visuels sur la piste à certains aéroports. Ces aides permettent de connaître la longueur de piste restante et peuvent aider les pilotes à décider de l’utilisation optimale des dispositifs de décélération. Toutefois, ceux-ci ne sont pas exigés par la réglementation, et leur utilisation n’est pas encore répandue.
Différents organismes, agences et constructeurs reconnaissent que plusieurs facteurs de risque sont généralement présents lors des sorties en bout de piste. Par ailleurs, la Flight Safety Foundation (FSF) a déterminé que les facteurs de risque multiples avaient un effet synergique, et que le risque plus que doublait en présence de 2 facteurs de risque. Des 10 facteurs qui augmentent le risque de sortie en bout de piste publiés dans la Circulaire d’information (AC) 91-79A de la Federal Aviation Administration (FAA) aux États-Unis, 7 étaient présents lors de l’atterrissage de l’aéronef à l’étude. Même si le commandant était conscient que la piste était mouillée et qu’un vent de dos soufflait, il n’a pas tenu compte des autres facteurs ni de la combinaison de tous les facteurs présents.
La FAA propose une stratégie qui repose sur la formation non seulement théorique, mais aussi pratique, afin d’améliorer la reconnaissance des atterrissages à risque. Les pilotes n’avaient reçu aucune formation spécifique sur les facteurs de risque de sortie en bout de piste, et la réglementation n’en exige pas pour les exploitants régis par la sous-partie 703 du Règlement de l’aviation canadien (RAC).
Fait établi quant aux risques
Si les SOP et la formation n’incorporent pas les facteurs de risque de sortie en bout de piste, il est possible que ces facteurs de risque ne soient pas pris en considération pendant l’approche, ce qui augmente le risque de sortie en bout de piste.
2.8.1 Approches stabilisées
Dans cette même circulaire AC 91-79A, la FAA considère que [traduction] « le respect des SOP et l’utilisation des pratiques exemplaires pour les approches stabilisées constitueront toujours la première ligne de défense pour éviter une sortie en bout de pisteNote de bas de page 59 ». De son côté, l’Aviation civile de Transports Canada (TCAC) stipule que [traduction] « comme l’importance accordée aux SOP est considérable, il incombe à TCAC de revoir les SOP des exploitants pour en évaluer la qualité, la cohérence, l’exactitude, la concision, la clarté, la pertinence et le contenuNote de bas de page 60 ».
L’interprétation des ambiguïtés et contradictions des SOP n’est pas un phénomène propre au vol à l’étude. Entre 1994 et 2022, les procédures incohérentes ou manquantes sont ressorties dans 39 faits établis (divers) dans les rapports d’enquête sur la sécurité du transport aérien du BST. Dans bien des cas, les procédures avaient fait l’objet d’une revue de la part de TCAC et aucune irrégularité n’avait été détectée. Ces incohérences et ces manquements laissent aux pilotes la possibilité d’interpréter certaines situations, qui parfois réduisent les marges de sécurité.
Le manuel d’exploitation de vol d’Airmédic Inc. (Airmedic) ne contient pas de politique générale sur l’obligation de faire des approches stabilisées ni sur l’obligation d’effectuer une remise des gaz si l’approche est instable. Les SOP d’Airmedic quant à elles définissent les critères d’approche stabilisée, les annonces requises en cas de déviation (marge de vitesse et taux de descente), ainsi que le moment où l’approche « devrait » être stabilisée. Par ailleurs, les SOP sont assez claires pour les approches visuelles : l’aéronef « doit être » configuré pour l’atterrissage et la liste de vérification avant atterrissage « doit être » exécutée entièrement avant d’atteindre 1000 pieds AGL. Toutefois, l’utilisation du mot « devrait » si l’approche n’est pas stabilisée peut donner l’impression d’une suggestion plutôt qu’une directive formelle et que la poursuite de l’approche est à la discrétion du commandant. Ainsi, ne se sentant pas dans l’obligation formelle de faire une remise des gaz, le pilote se fie sur son expérience et son évaluation de la situation présente pour déterminer si la réussite de l’atterrissage est toujours possible. Lors du vol à l’étude, étant convaincu qu’il pouvait réussir l’atterrissage dans le premier ⅓ de la piste, le commandant a poursuivi l’approche et l’atterrissage.
Les SOP d’Airmedic ont été revues par TCAC, qui a vérifié que les sujets exigés par la réglementation étaient couverts, et a délivré une lettre de conformité à la compagnie. Toutefois, la qualité, la cohérence, l’exactitude, la concision, la clarté, et la pertinence de ces SOP n’ont pas été vérifiées par TCAC.
Fait établi quant aux risques
Si TCAC n’évalue pas la qualité, la cohérence, l’exactitude, la concision, la clarté et la pertinence des SOP d’un exploitant, ces procédures pourraient ne pas être efficaces, ce qui augmente les risques pour les opérations de vol .
L’inspection de processus (IP) réactive effectuée par TCAC après l’événement a donné lieu, entre autres, à une observation visant la formulation des SOP qui « ne prévoient pas d’appel standard à altitudes déterminées pour déterminer si les critères de stabilisation [lire : critères d’approche stabilisée] sont rencontrés ou non » et qui pouvaient « laisser croire aux membres d’équipage qu’ils ont une discrétion sur l’application des critères de stabilisationNote de bas de page 61 ». Afin d’éviter une situation similaire à celle du vol à l’étude, certains exploitants imposent, dans leurs SOP, une annonce de nature exécutoire de remise des gaz si les critères d’approche ne sont pas respectés au point désigné d’approche stabilisée ou plus tard.
Le commandant du vol à l’étude, qui avait une charge de travail élevée, était concentré sur la manœuvre à exécuter et était toujours convaincu qu’il était possible de réussir l’atterrissage, n’était pas en mesure de prendre en considération tous les facteurs de risque de sortie en bout de piste. À ce moment-là, le P/O avait des doutes quant à la réussite de l’atterrissage à la suite de cette approche instable, mais il n’avait plus le temps de discuter et de convaincre le commandant d’effectuer une remise des gaz. Ainsi, un ordre exécutoire de remise des gaz était la seule solution pour stopper l’atterrissage à la suite d’une approche instable.
Fait établi quant aux risques
Si les SOP n’incorporent pas d’annonces obligatoires et exécutoires de remise des gaz lorsque les approches deviennent instables, les pilotes pourraient choisir de poursuivre des approches instables, ce qui augmente le risque de sortie en bout de piste.
2.8.2 Gestion des approches à risque
En août 2021, à la suite d’un incident similaire survenu quelques mois avant l’événement à l’étude, la compagnie avait pris des mesures afin d’éviter que ce type d’approche à haute vitesse ne se reproduise. Toutefois, à la lumière de l’événement à l’étude, celles-ci n’ont pas empêché une répétition de ce type d’approche.
2.8.3 Enregistreurs de données légers et suivi des données de vol
Les avions d’Airmedic sont dotés d’un système d’enregistrement de certaines données de vol qui sont utilisées pour le contrôle de l’état du moteur. Toutefois, les avions ne sont pas munis d’enregistreurs de données légers (LDR) et ne sont pas tenus de l’être du point de vue de la réglementation. La présence même d’un LDR à bord peut avoir une influence positive sur le comportement des pilotes. Le suivi des données de vol (SDV) quant à lui offre la possibilité de surveiller l’exécution des vols, c’est-à-dire de vérifier le respect des procédures de l’entreprise et des limites opérationnelles, et de déceler les manœuvres à risque afin de prendre des mesures correctives avant qu’un accident ne se produise.
Depuis des décennies, les exploitants d’aéronefs multimoteurs à turbomoteurs utilisés pour le transport de passagers s’aident de systèmes de SDV pour gérer la sécurité de façon préventive. À plusieurs reprises dans ses rapports d’enquête sur la sécurité du transport aérien, le BST a fait ressortir le potentiel que représentent les LDR et les systèmes de SDV pour aider les autres exploitants à repérer de manière proactive les lacunes de sécurité avant qu’elles ne provoquent un accident. De plus, le BST a émis 2 recommandations liées à la mise en œuvre du SDV et à l'installation de LDR.
Transports Canada (TC) a indiqué être d’accord en principe avec ces recommandations et, en 2021, a publié un Avis de proposition de modification (APM) sur les LDR. Suite à cette publication, TC a reçu des contributions et des commentaires importants du secteur qui ont donné lieu à une réévaluation de l’approche et de la portée des exigences en matière de LDR. Un nouvel APM révisé devrait être publié en 2023. La révision de l’APM et la consultation supplémentaire viendront retarder les échéanciers de mise en œuvre de la réglementation tels qu’ils sont décrits dans le Plan prospectif de réglementation de TC. Jusqu’à ce que l’APM révisé soit accessible pour un examen, on ne saura pas si les exigences proposées précédemment seront préservées. Par contre, dans un contexte de gestion proactive des dangers opérationnels, les exploitants pourraient prendre des mesures sans attendre d’y être contraints par la réglementation.
Comme nous l’avons constaté dans le cadre de l’événement à l’étude, Airmedic a accès à certaines données lorsqu’un dépassement des paramètres est décelé. Cependant, la compagnie n’a pas accès aux données dans les autres cas et ne peut pas effectuer de suivi au besoin.
Fait établi quant aux risques
Si les exploitants ne disposent pas de LDR ni de systèmes de SDV, ils pourraient ne pas être en mesure de surveiller le respect des politiques et procédures et des limites opérationnelles, ce qui augmente le risque que les écarts ou les pratiques dangereuses ne soient pas détectés et se poursuivent.
3.0 Faits établis
3.1 Faits établis quant aux causes et aux facteurs contributifs
Il s’agit des conditions, actes ou lacunes de sécurité qui ont causé l’événement ou y ont contribué.
- Lors du vol à l’étude, le commandant, jumelé à un premier officier ayant peu d’expérience sur le Pilatus PC-12, a décidé de faire la démonstration d’une approche finale à haute vitesse avec décélération juste avant la piste. Par conséquent, le point désigné d’approche stabilisée défini dans les procédures d’exploitation normalisées (1000 pieds au-dessus du sol) a été franchi en configuration lisse à une vitesse indiquée de 236 nœuds.
- Le premier officier avait des doutes quant à la réussite de l’atterrissage lors de l’approche à haute vitesse; toutefois, en raison du rapport d’autorité, il s’en est remis à l’expérience du commandant et n’a pas osé donner l’ordre exécutoire de remise des gaz.
- Lorsque l’aéronef était à environ 1,7 mille marin de la piste, à une vitesse indiquée de 238 nœuds à 500 pieds au-dessus du sol, il n’était plus possible de décélérer et de poursuivre la descente pour atteindre le seuil de piste à 50 pieds au-dessus du sol en configuration d’atterrissage stabilisé à la vitesse de référence d’atterrissage indiquée de 95 nœuds. Toutefois, percevant qu’il était toujours possible de se poser dans le premier tiers de piste, le commandant a poursuivi l’approche.
- À environ 0,5 mille marin de la piste à 500 pieds au-dessus du sol, alors qu’il était concentré sur l’exécution de l'atterrissage dans le premier tiers de piste, le commandant a insisté pour que le train d’atterrissage soit sorti même si la vitesse de l’aéronef dépassait à ce moment-là la vitesse maximale de manœuvre du train d'atterrissage. Le premier officier a exécuté l’ordre et le train est sorti, ce qui a permis à l’atterrissage de se poursuivre.
- L’aéronef a franchi le seuil de piste à 200 pieds au-dessus du sol à une vitesse indiquée de 180 nœuds, à un taux de descente de 2000 pi/min, le train d'atterrissage en transit et les volets entièrement rentrés. Dans ces conditions, il n’était pas possible d’arrêter l’aéronef sur la piste mouillée. Toutefois, le commandant, sous l’influence du biais de tendance à s’en tenir au plan et concentré sur l’exécution de l’atterrissage dans le premier tiers de la piste, a poursuivi l’approche.
- L’aéronef s’est posé sur la piste à environ 2525 pieds du seuil à une vitesse indiquée de 159 nœuds, soit à une vitesse sol de 167 nœuds. Étant donné que la vitesse excessive, combinée aux autres facteurs, a augmenté la distance d’atterrissage, l’aéronef est sorti en bout de piste à une vitesse sol de 57 nœuds, 21 secondes plus tard.
3.2 Faits établis quant aux risques
Il s’agit des conditions, des actes dangereux, ou des lacunes de sécurité qui n’ont pas été un facteur dans cet événement, mais qui pourraient avoir des conséquences néfastes lors de futurs événements.
- Si les enregistrements de conversations de poste de pilotage ne sont pas disponibles aux enquêteurs du BST, il est impossible d’évaluer avec exactitude la prise de décision du pilote, la gestion des ressources de l’équipage, la gestion de la charge de travail, et l’exécution et le respect des procédures d’exploitation normalisées, ce qui risque de nuire à la détection des lacunes de sécurité et donc à l’amélioration de la sécurité des opérations de vol.
- Si les procédures d’exploitation normalisées et la formation n’incorporent pas les facteurs de risque de sortie en bout de piste, il est possible que ces facteurs de risque ne soient pas pris en considération pendant l’approche, ce qui augmente le risque de sortie en bout de piste.
- Si l’Aviation civile de Transports Canada n’évalue pas la qualité, la cohérence, l’exactitude, la concision, la clarté et la pertinence des procédures d’exploitation normalisées d’un exploitant, ces procédures pourraient ne pas être efficaces, ce qui augmente les risques pour les opérations de vol.
- Si les procédures d’exploitation normalisées n’incorporent pas d’annonces obligatoires et exécutoires de remise des gaz lorsque les approches deviennent instables, les pilotes pourraient choisir de poursuivre des approches instables, ce qui augmente le risque de sortie en bout de piste.
- Si les exploitants ne disposent pas d’enregistreurs de données légers ni de systèmes de suivi des données de vol, ils pourraient ne pas être en mesure de surveiller le respect des politiques et procédures et des limites opérationnelles, ce qui augmente le risque que les écarts ou les pratiques dangereuses ne soient pas détectés et se poursuivent.
3.3 Autres faits établis
Ces éléments pourraient permettre d’améliorer la sécurité, de régler une controverse ou de fournir un point de données pour de futures études sur la sécurité.
- Selon l’interprétation de l’Aviation civile de Transports Canada, l’aéroport de Sept-Îles est un aéroport non contrôlé, car il n’est pas doté d’une tour de contrôle. Par conséquent, la limite de vitesse de 200 nœuds stipulée à l’alinéa 602.32(1)b) du Règlement de l’aviation canadien ne s’applique pas.
4.0 Mesures de sécurité
4.1 Mesures de sécurité prises
4.1.1 Airmédic Inc.
Suite à l’événement, Airmédic Inc. a effectué des modifications à ses procédures d’exploitation normalisées pour réduire les ambiguïtés et répondre aux observations soulevées par l’Aviation civile de Transports Canada lors de l’inspection de processus réactive.
4.1.2 Aéroport de Sept-Îles
Suite à l’événement, les mesures suivantes ont été prises :
- Une procédure a été mise en place pour que les pilotes soient informés de la présence de plus de ⅛ pouce de pluie ou de l’eau stagnante sur la piste.
- Les fiches d’inspection quotidienne incluent dorénavant une vérification des conditions de piste.
- Du personnel aéroportuaire est maintenant présent pour tous les vols commerciaux selon l’horaire de vol en vigueur.
Le présent rapport conclut l’enquête du Bureau de la sécurité des transports du Canada sur cet événement. Le Bureau a autorisé la publication de ce rapport le . Le rapport a été officiellement publié le .
Annexes
Annexe A – Carte d’approche de l’aéroport de Sept-Îles
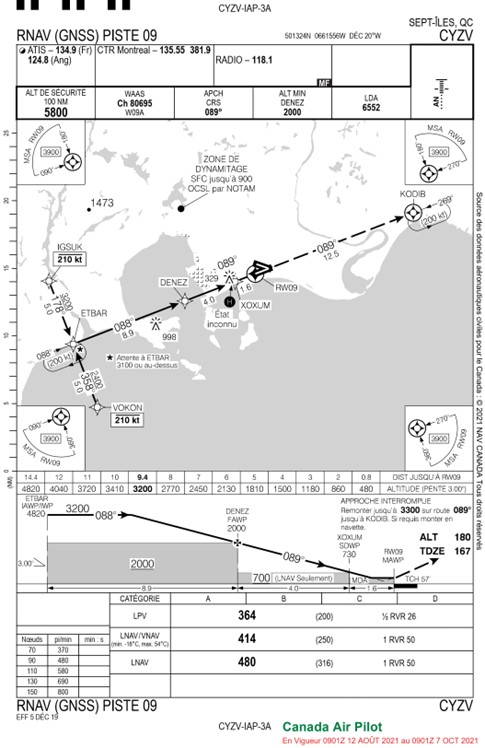
NE PAS UTILISER POUR LA NAVIGATION
Source : NAV CANADA, Canada Air Pilot (CAP), CAP 6 : Québec, en vigueur du 12 août 2021 au 7 octobre 2021
Annexe B – Événements significatifs
| Heure locale | Distance
du seuil |
Altitude
(pieds ASL) |
Vitesse
(KIAS) |
Événement |
|---|---|---|---|---|
| 16:00:00 | s/o | s/o | s/o | Décollage de l’aéroport international de Québec/Jean Lesage |
| 16:57:21 | – | 25 291 | 191 | En descente |
| 17:05:26 | 14,5 NM | 5078 | 213 | ETBAR (altitude publiée 4820 pi ASL) |
| 17:05:50 | – | 4500 | 213 | Annulation du plan de vol IFR |
| 17:06:00 | 13 NM | 4265 | 217 | Augmentation de la puissance |
| 17:06:32 | 10 NM | 3477 | 240* | Alerte Vmo / Réduction de la puissance |
| 17:06:34 | – | – | 240* | |
| 17:07:33 | 5,6 NM | 2020 | 233 | DENEZ (altitude publiée 2000 pi ASL) |
| 17:08:08 | 3,0 NM | 1173 | 236 | 1000 pi AGL; vitesse indiquée : 236 nœuds |
| 17:08:10 | – | 1121 | 236 | Rapport de position 4 milles en finale |
| 17:08:25 | 1,7 NM | 684 | 238 | 500 pi AGL (1re fois) |
| 17:08:26 | – | 661 | 241* | Survitesse par rapport à la Vmo |
| 17:08:27 | – | 633 | 244* | Réduction de la puissance au minimum |
| 17:08:28 | 1,6 NM | 611 | 242 | XOXUM (altitude publiée 730 pi ASL) |
| 17:08:31 | – | 592 | 232 | Augmentation de l’altitude (pour ralentir) |
| 17:08:43 | 0,6 NM | 670 | 192 | 500 pi AGL (2e fois) |
| 17:08:44 | – | 651 | 188** | Sélection de la sortie du train d’atterrissage; survitesse |
| 17:08:53 | 0 | 368 | 180** | Passage au seuil de piste : 200 pi AGL; vitesse sol 191 nœuds |
| 17:08:55 | – | 301 | 182** | Fin de la survitesse du train |
| 17:08:56 | – | 271 | 177 | Train sorti et verrouillé |
| 17:09:01 | + 2250 pi | – | 164 | Atterrissage; vitesse sol : 170 nœuds |
| 17:09:02 | + 2525 pi | – | 159*** | Atterrissage; vitesse sol : 167 nœuds |
| 17:09:03 | + 2800 pi | – | 157 | Atterrissage; vitesse sol : 164 nœuds |
| 17:09:17 | +5802 pi | – | 77 | Augmentation de l’inverseur de poussée |
| 17:09:23 | +6552 pi | – | 53 | Atteinte du bout de la piste 09; vitesse sol : 57 nœuds |
| 17:09:33 | +7142 pi | – | 11 | Amorce du virage à droite autour d'un feu d'approche (à 590 pi du bout de la piste) |
| 17:09:42 | +7192 pi | – | 12 | Position la plus éloignée par rapport au bout de piste (à 640 pi du bout de la piste) |
* Survitesse par rapport à la Vmo
** Survitesse par rapport à la vitesse maximale avec volets sortis
*** Selon les données disponibles, qui étaient limitées, on estime que le poser des roues s'est produit entre 17 h 09 min 01 s et 17 h 09 min 03 s. Même s’il n’a pas été possible de déterminer avec certitude le point exact, à toute fin pratique, il est plus probable que le poser des roues se soit produit au milieu de ce laps de temps plutôt qu'au tout début ou à la toute fin. Ainsi, afin de simplifier la lecture du rapport, on considère que le poser des roues est survenu à 17 h 09 min 02 s, à environ 2525 pieds au-delà du seuil de piste, à 159 KIAS et à une vitesse sol de 167 nœuds.
Source : BST
Annexe C – Carte d’aérodrome de l’aéroport de Sept-Îles
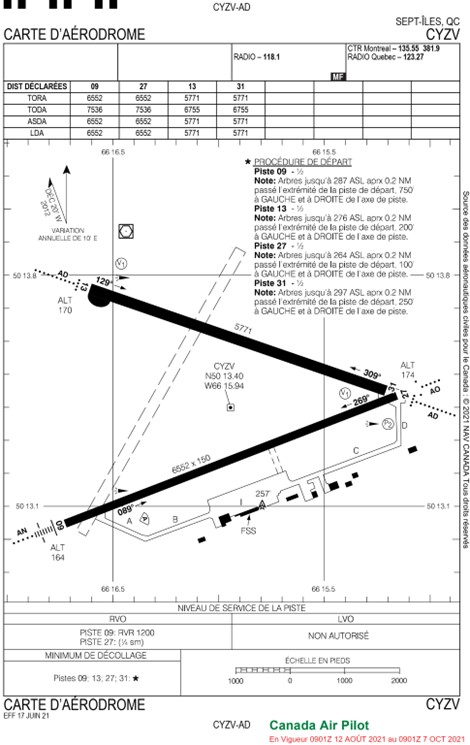
NE PAS UTILISER POUR LA NAVIGATION
Source : NAV CANADA, Canada Air Pilot (CAP), CAP 6 : Québec, en vigueur du 12 août 2021
au 7 octobre 2021
Annexe D – Tracés des données de vol

Source: BST

Source: BST

Source: BST